随着经济与技术的发展,人们在关注产品功能的同时更加注重用户体验。传统的机械产品设计只注重功能、质量和成本等基本属性,忽略了人机性能,导致产品在舒适性、可控性等方面存在不足[1 ] 。因此,准确识别产品的人机工程问题,提升产品的人机性能具有重要意义。
对于人机工程问题的确定,常用的方法有4种。第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题。第2种是实验法。杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题。第3种是数学法。Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度。第4种是虚拟仿真法。Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化。综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低。
冲突区域是指功能模型中与问题相关的区域[9 ] 。功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] 。目前,冲突区域诊断方法主要有3种。第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突。第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域。牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量。第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域。张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题。在实际应用中,3种冲突区域诊断方法往往结合使用。然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别。
功能表面是组成机械产品结构的最小抽象物质单元,其不仅可以表达产品结构表面的功能特征,也可以形式化表达产品结构的几何特征[15 ] 。杨金勇[16 ] 基于功能表面的定位功能,提出了一种可以广义定位表达产品功能的模型,解决了功能结构之间直接映射导致的病态性等问题;杨波等[17 -18 ] 将功能表面扩展并重新关联,以构成新的产品结构骨架,从而完成产品的创新设计。拓展研究人与产品的接触功能表面有助于实现对人机工程问题中交互功能和内部交互结构的一体化分析。功能表面既是产品结构之间的“桥梁”,又是人与产品之间的“桥梁”,拓展研究人与产品、产品内部结构之间的功能表面有助于解决功能模型中人机冲突区域的识别问题。
功能表面虽能解决人机冲突区域识别问题,但仅靠功能表面和功能模型得不到产品的不良功能、结构之间的相关关系,即无法有效完成人机工程问题冲突区域的确定。可拓学[19 ] 以形式化的方式描述客观世界中的事、物及其关系,利用拓展、变换等来研究事物的创新规律。刘晓敏等[20 -21 ] 基于可拓基元理论及形式化的描述方法,完成了产品与生物的多层次拓展以及仿生原型的获取,解决了产品设计中创意矛盾的问题;白仲航等[22 ] 提出了一种集成可拓工具的裁剪创新方法,运用基元来表达被裁剪元件的有用功能,解决了裁剪后寻找代替资源的随机性问题。由此可知,可拓工具和其他创新方法的融合可以针对性地解决某类矛盾问题[19 ] 。
基于此,本文首先引入功能表面作为连接人与产品的“桥梁”,通过广义定位原理等改进功能模型,以识别交互式产品内部冲突区域和人机冲突区域;然后通过可拓表达、相关分析、蕴含分析及优度评价等进行辅助分析,以确定有效的人机冲突区域和产品内部冲突区域;最后利用标准解对不良作用进行求解,并运用优度评价对求解方案进行筛选,以解决人机工程问题和实现产品创新设计。
1 功能表面、功能模型与可拓工具
1.1 功能表面
功能表面是产品功能与结构的信息载体[23 ] ,其映射方式为功能—功能表面—结构。功能表面可表示为:
F S = M , T , F , G
其中:FS表示功能表面;M表示表面名称;T表示表面几何类型;F表示表面功能特征;G表示表面几何特征[24 ] 。
根据定位对象的不同,将功能表面分为定位表面和使定表面。依据广义定位原理,功能表面的传递链从原动件的使定表面开始,传递到执行件的使定表面后结束[25 ] ,传递过程如图1 所示。
图1
图1
基于功能表面的产品功能传递链
Fig.1
Product function transfer chain based on functional surfaces
1.2 功能模型
TRIZ(Teoriya Resheniya Izobreatatelskikh Zadatc,发明问题解决理论)中的功能模型分为2种:功能过程模型和功能关系模型。功能过程模型是指功能元按照产品的能量流、物质流及信息流的输入和输出进行串联或并联,最终形成一个有向网络图的过程[9 ] 。它不仅能描述产品系统中流的转换过程,还能描述各分功能之间的关系,可为确定问题功能元提供理论基础[25 -26 ] 。功能关系模型是由系统边界内的元件、制品、超系统及其作用关系组成的功能网络[27 ] ,它建立在元件分析、相互作用和功能分析的基础上,用于表示问题功能元中各元件之间的作用关系。2种功能模型充分考虑了功能实现的过程和元件间的作用关系,对冲突区域的识别具有至关重要的作用。
1.3 可拓工具
可拓表达是指将事与物、特征及相应量值以三元组的形式表达[19 ] 。相关分析是指通过定量化分析基元间的逻辑关系来表达事物间的相关关系和作用机理。蕴含分析是指以基元形式表达和分析事、物及其关系的蕴含性。蕴含系包含上位基元和下位基元,2种基元具有“与”或者“或”的关系。在蕴含系中解决矛盾问题的路径是找到易实现的下位基元。优度评价是可拓学中评价和筛选事物的基本方法[28 ] 。该方法先建立与评价对象相关的多指标参数,再利用关联函数定量化描述事物,最后以客观数据来表示评定结果,从而实现对评价对象综合水平的客观了解。
2 基于功能表面的功能模型及其可拓表达
2.1 功能表面与功能模型之间的联系
在功能过程模型中,每个功能元对流的转换都需要功能关系模型中对应元件及场的作用来实现。当功能元的作用对象为物质流时,功能元直接对应功能关系模型中的元件(物质);当功能元的作用对象为能量流或信息流时,功能关系模型中的元件会作为功能载体来转换能量流或信息流。
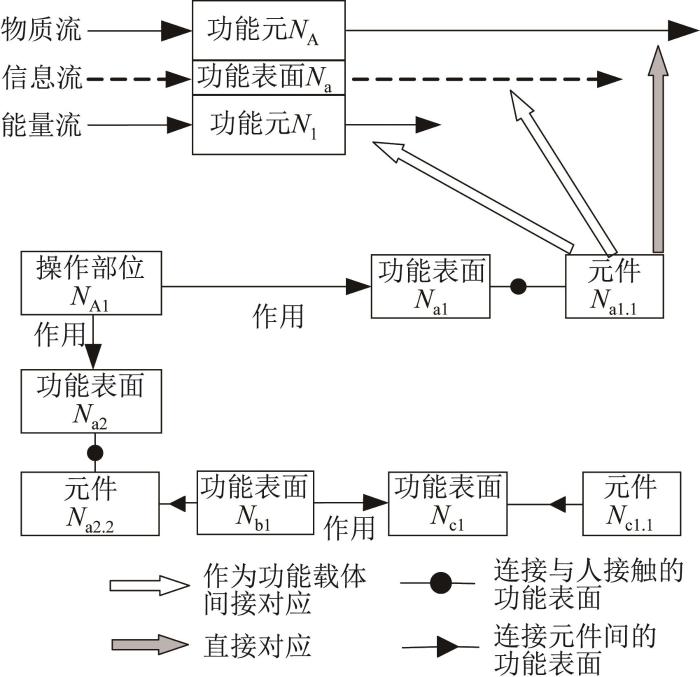
结合功能过程模型与功能关系模型可以表达产品功能与各元件之间的相互作用关系,但无法表达人机交互作用关系。而功能表面既可以表示元件与元件之间的作用表面,又可以表示人与产品的实际接触表面。利用功能表面可以精确定位人与产品以及元件之间的作用表面。功能表面与功能模型之间的联系如图2 所示。
图2
图2
功能表面与功能模型之间的联系
Fig.2
Connection between functional surfaces and functional models
由图2 可知,功能过程模型包含人的功能元N A 、产品功能元N 1 、功能表面以及流之间的转换;功能关系模型包含实现人的功能元N A 的操作部位N A1 、实现产品功能元N 1 的所有元件、人与产品的实际接触表面N a1 和N a2 以及元件间作用表面N b1 和N c1 。当功能过程模型中的作用对象为物质流时,人的功能元N A 、产品功能元N 1 和功能表面直接对应功能关系模型中的操作部位N A1 、所有元件和所有功能表面;当功能过程模型中的作用对象为能量流或信息流时,以功能关系模型中的操作部位N A1 、所有元件及功能表面作为功能载体,实现对能量流或信息流的转换。
2.2 基于功能表面的功能过程模型及其可拓表达
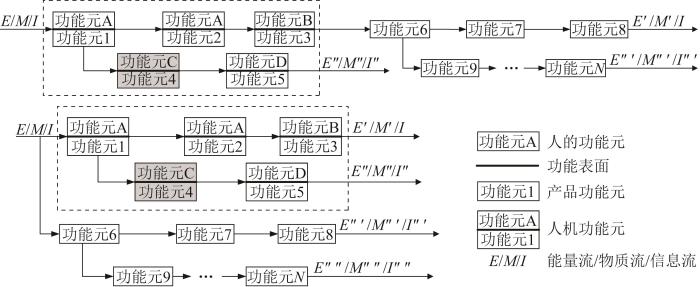
功能过程模型描述了产品功能元及其流转换的关系,通过对比实际输出流和期望输出流的差异来确定问题功能元。为确定人机工程问题中的问题功能元,在功能过程模型中的产品功能元的基础上加入人的功能元,并用功能表面连接人的功能元与产品功能元,构建基于功能表面的功能过程模型,如图3 所示。其中,人的功能元、产品功能元及功能表面构成人机功能元。基于功能表面的功能过程模型分为人机交互部分(由人机功能元构成)和产品内部结构(由产品功能元构成)两部分,这2个部分具有串联或并联的关系。通过构建改进的功能过程模型,可以表达传统功能过程模型未涉及的人机交互部分,进而确定人机工程问题中的问题功能元及问题功能元的类型。
图3
图3
基于功能表面的功能过程模型
Fig.3
Functional process model based on functional surfaces
在基于功能表面的功能过程模型中,问题功能元采用基元理论中的事元表达。通过对功能元的可拓化分析,确定备选问题功能元和问题输出流,从而为最终问题功能元的分析和确定奠定基础。问题功能元A 可表示为:
A = O a , 支配 对象 , v a 1 施动 对象 , v a 2 功能 表面 , v a 3 输入 流 , v a 4 输出 流 , v a 5 期望 输入 流 , v a 6 期望 输出 流 , v a 7 实现 原理 , v a 8 对应 结构 , v a 9 与人 作用 关系 , v a 10 ⋮ c a n , ⋮ v a n
式中:O a 为功能元中的动作;c a n v a n
2.3 基于功能表面的功能关系模型及其可拓表达
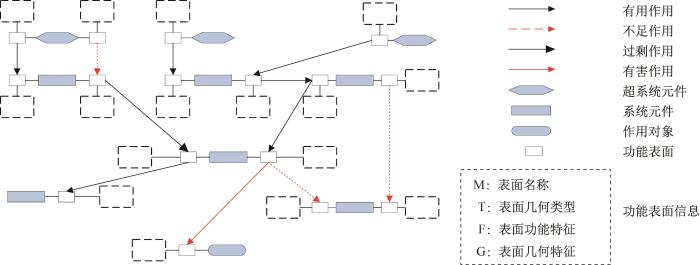
针对传统的功能关系模型无法表示人机功能元对应的物理结构及操作部位的问题,将操作部位作为系统中的元件加入功能关系模型。为更好地确定人机工程问题的冲突区域,将元件间的作用关系精确到元件功能表面间的作用关系,构建基于功能表面的功能关系模型,如图4 所示。其中,功能表面信息包含表面的名称、几何类型、功能特征及几何特征。通过构建基于功能表面的功能关系模型,分析人与产品和产品内部之间的不良作用关系。
图4
图4
基于功能表面的功能关系模型
Fig.4
Functional relationship model based on functional surfaces
利用改进的功能关系模型进行分析,确定初始冲突区域。初始冲突区域中的问题元件P 用基元理论中的物元表达,不良作用D 用事元表达,可分别表示为:
P = O p , 功能 , v p 1 功能 表面 , v p 2 形状 , v p 3 尺寸 , v p 4 材质 , v p 5 ⋮ ⋮ c p n , v p n
D = O d , 支配 对象 , v d 1 施动 对象 , v d 2 定位 表面 , v d 3 使定 表面 , v d 4 动力 , v d 5 ⋮ ⋮ c d n , v d n
其中:O p 为元件;c p n v p n O d 为作用;c d n v d n
3 人机工程问题冲突区域的确定与不良作用的求解过程
3.1 基于相关分析的问题功能元确定过程
利用改进的功能过程模型来确定人机工程问题的初始问题功能元,具体步骤如下。
2)建立基于功能表面的功能过程模型。将人机工程问题的总功能分解到功能元,然后按照功能元与能量流、物质流、信息流的输入和输出关系,建立基于功能表面的功能过程模型。
3)确定初始问题功能元。通过分析改进功能过程模型中每个功能元的实际输出流与期望输出流的差异,将存在差异的功能元视为初始问题功能元。
对初始问题功能元进行可拓表达,进而确定备选问题功能元和问题输入流,步骤如下。
1)初始问题功能元的可拓表达。利用事元表达初始问题功能元,并分析初始问题功能元的原理、结构以及与人的作用关系。备选问题功能元产生的原因包括:①问题功能元输入流的属性问题;②原理解中功能元实际执行流转换的能力不足或出现有害输出流;③人机功能元对应的原理解不符合人机交互设计准则;④人为误操作。
2)确定备选问题功能元和问题输入流。若问题输出流是原理、结构等因素导致的,则确定该功能元为备选问题功能元;若问题输出流是输入流导致的,则在改进功能过程模型中转换到上一个功能元,并判断转换后的功能元是原理、结构问题还是输入流问题;若问题输入流是超系统输入的,则停止转换问题功能元。
由于备选问题功能元之间存在复杂的相关关系,不能直接有效地确定最终问题功能元,因此须先分析备选问题功能元的相关关系,再确定最终问题功能元,步骤如下。
1)构建备选问题功能元的相关分析网。通过相关分析得到备选问题功能元的相关关系,确定备选问题功能元选项。
2)确定最终问题功能元。从产品本体、人机交互以及人本体三方面分析所有备选问题功能元选项,并结合问题表象选择发生可能性最大、不易控制且舒适度低的功能元为最终问题功能元。
3.2 基于功能表面和蕴含分析的冲突区域确定过程
利用改进的功能关系模型来确定最终问题功能元的初始冲突区域,步骤如下。
2)根据产品问题功能元和人机问题功能元的表象,确定初始冲突区域。若最终问题功能元仅为人的功能元,则默认是人为误操作,不属于研究范围。
由于冲突区域的产生原因存在复杂的因果关系,须先对初始冲突区域进行可拓表达,再运用蕴含分析确定最终冲突区域,具体步骤如下。
1)冲突区域的可拓表达。采用物元、事元分别表达初始冲突区域中的问题元件和不良作用,分析初始冲突区域是否涉及其他元件并判断是否需要转换冲突区域。若转换了冲突区域,则须重新对转换的冲突区域进行可拓表达。
2)确定备选根原因。通过构建蕴含分析图,确定备选根原因。
3)确定最终冲突区域。利用优度评价分析备选根原因的优先级,基于优度值大小确定最关键的问题,即最终冲突区域。最终冲突区域的衡量指标根据备选根原因对人的影响程度和产品性能提升程度来选择。
3.3 人机工程问题的不良作用求解
人机工程问题的冲突区域可能是产品内部的冲突区域,也可能是人机冲突区域。利用标准解对人机工程问题的冲突进行求解,具体步骤如下。
1)将最终冲突区域转换为标准物质-场模型,分析其物质与场的作用关系,判断不良作用类型。3种不良作用类型分别为不完整作用、非充分作用以及有害作用。
2)利用标准解对不良作用进行求解。不完整作用采用1.1类标准解求解;非充分作用采用1类或2类标准解求解;有害作用采用1.2类标准解求解。
3)得到初始解后,利用3类/5类标准解来改进和完善设计方案,并对设计方案进行优度评价,得到最终的创新设计方案。
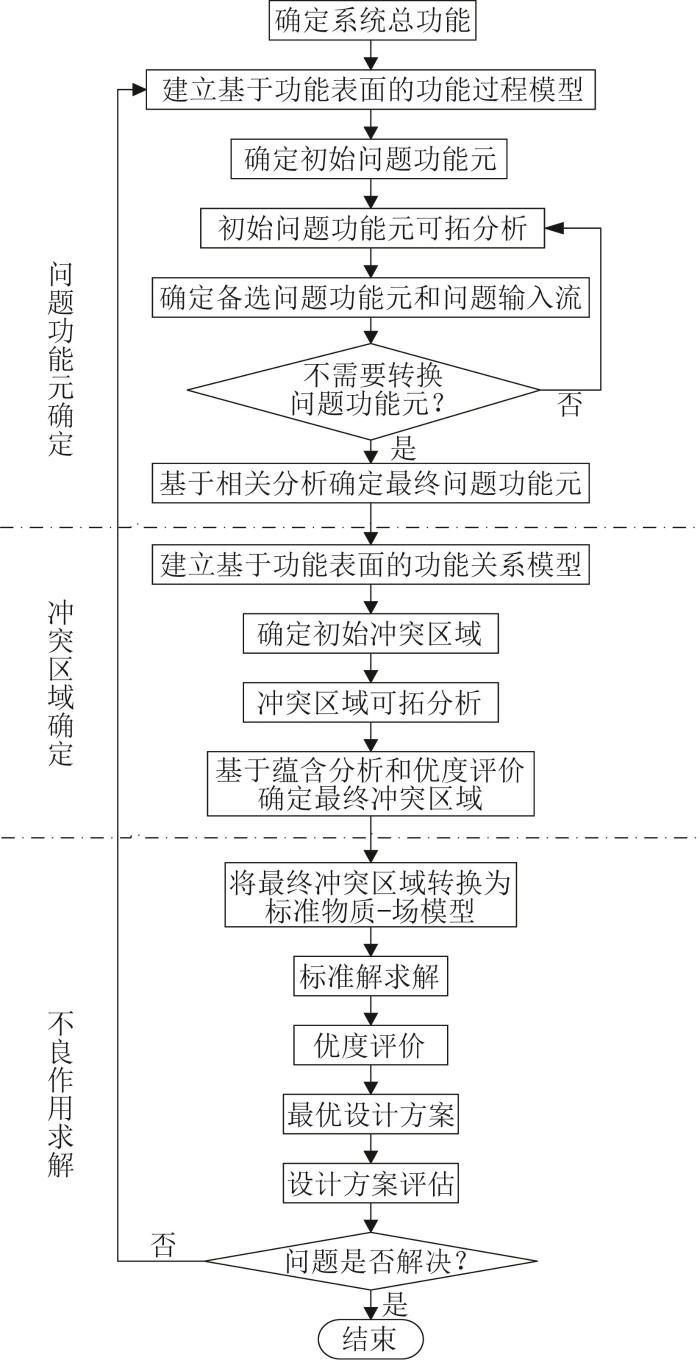
人机工程问题的冲突区域确定与不良作用求解过程如图5 所示。
图5
图5
人机工程问题冲突区域确定与不良作用求解过程
Fig.5
Ergonomics problem conflict zone determination and adverse effect solution process
4 应用实例
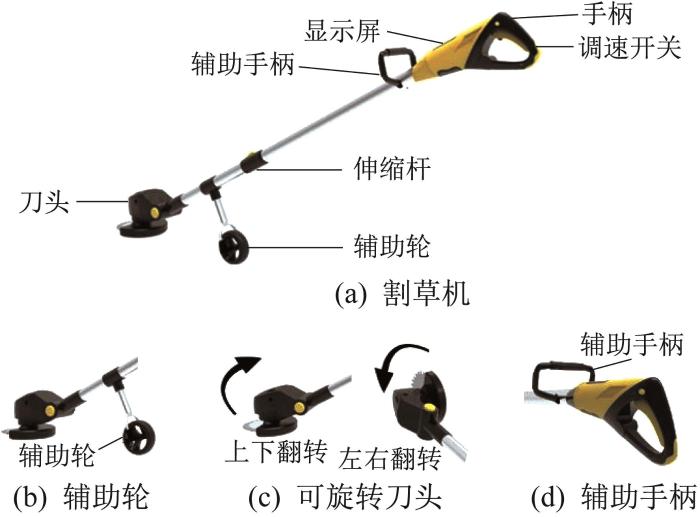
电动割草机是一种用于割除灌木、杂草和收割庄稼的便携式农业机械。据调研,用户在使用电动割草机时经常会出现上肢疲劳、腰部疼痛等问题。现采用基于功能表面驱动与可拓工具的冲突区域确定方法对电动割草机的人机工程问题进行分析和解决。电动割草机实物如图6 所示。
图6
图6
电动割草机
Fig.6
Electric lawn mower
4.1 问题功能元的确定
图7
图7
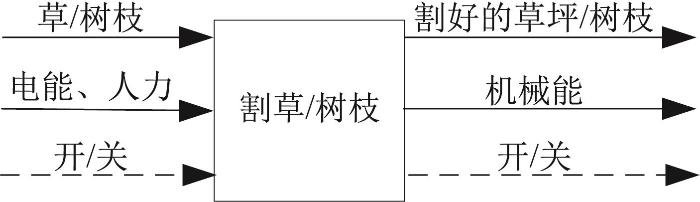
电动割草机总功能
Fig.7
Overall function of electric lawn mower
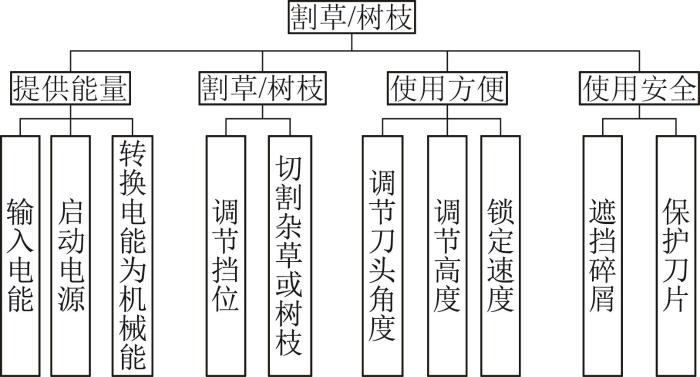
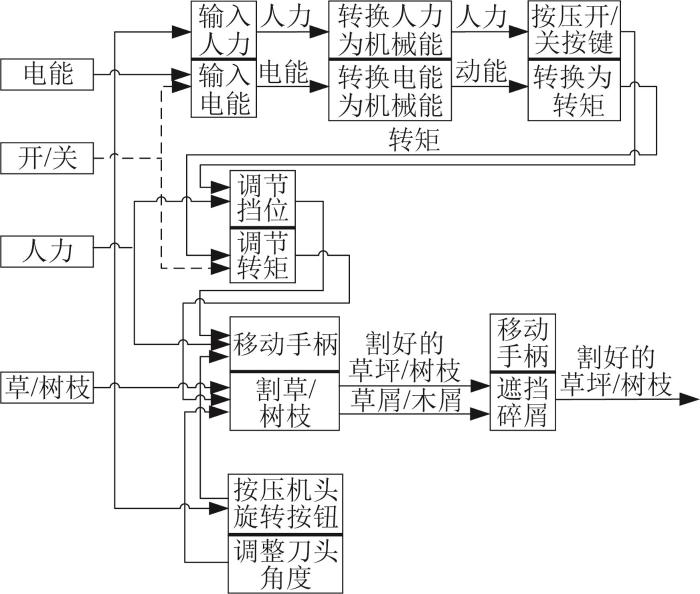
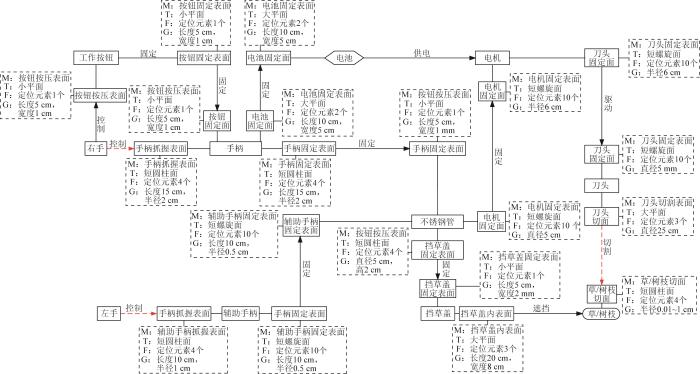
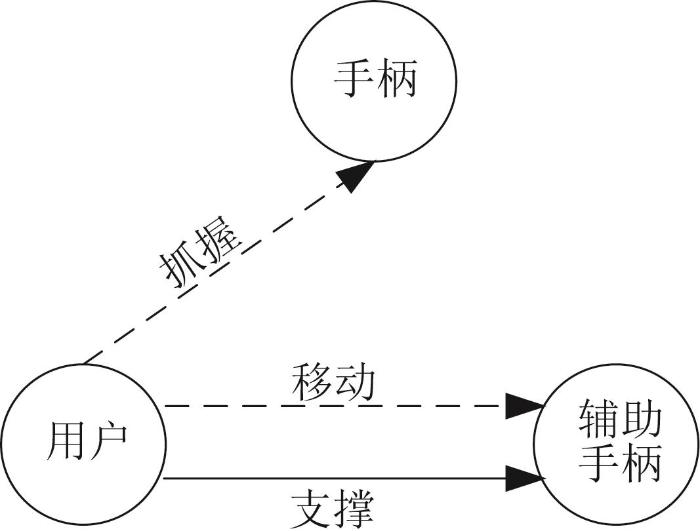
2)建立基于功能表面的功能过程模型。先将割草机总功能分解到功能元,并建立其功能树,如图8 所示。随后,基于割草机的功能元,先分析割草机的人机交互作用以得到人的功能元,再建立基于功能表面的割草机功能过程模型,如图9 所示。在割草机工作过程中,用户先按压机头旋转按钮以调整刀头的角度,再打开开关,同时握住手柄、辅助手柄以及调速按键,最后移动手柄以切割杂草/树枝。
图8
图8
电动割草机功能树
Fig.8
Functional tree of electric lawn mower
图9
图9
基于功能表面的电动割草机功能过程模型
Fig.9
Functional process model of electric lawn mower based on functional surfaces
3)确定初始问题功能元。当割草机工作一段时间后,可能会出现草坪/树枝修剪不整齐,操作者上肢、腰部疲劳等问题。确定“割好的草坪/树枝”为问题输出流,即“移动手柄、割草/树枝”人机功能元出现了问题,由此确定该人机功能元为初始问题功能元。
4)对“移动手柄、割草/树枝”人机功能元进行可拓分析,分析其实现原理、结构以及与人的作用关系,并对其进行可拓表达,可表示为:
A a ( t 1 / t 1 — t 2 ) = 移动 , 支配 对象 , 手柄 、 辅助 手柄 施动 对象 , 手 功能 表面 , 手的 压力 面 输入 流 , 人力 输出 流 , 人力 期望 输入 流 , 人力 期望 输出 流 , 人力 舒适 度 , 低 可控 性 , 难
A 1 ( t 1 / t 1 — t 2 ) = 切割 , 支配 对象 , 草 / 树枝 施动 对象 , 刀头 功能 表面 , 刀头 切割 面 输入 流 , 草 / 树枝 、 转矩 、 人力 输出 流 , 未切 割好 的草 坪、 草屑 等 期望 输入 流 , 草 / 树枝 、 转矩 、 人力 期望 输出 流 , 切割 好的 草坪 / 树枝 对应 结构 , 刀头 切割 效率 , 低 与人 作用 关系 , 人控 制切 割方 向及 高度 可控 性 , 难
由初始问题功能元的可拓表达式可知:①“移动手柄”功能元出现问题,属于人为失误;②执行“割草/树枝”功能元的机构出现问题,将其列为备选问题功能元选项1;③“移动手柄、割草/树枝”人机功能元出现问题,属于产品机构不满足人机交互要求问题,将其列为备选问题功能元选项2。
5)确定备选问题功能元、问题输入流。若“移动手柄、割草/树枝”人机功能元的输入流为问题输入流,则问题功能元转换到其上一个功能元,即“调节挡位、调节转矩”人机功能元以及“按压机头旋转按钮、调整刀头角度”人机功能元。对转换的问题功能元进行可拓表达,表示为:
A b ( t 1 ) = 调节 , 支配 对象 , 挡位 按钮 施动 对象 , 右手 功能 表面 , 手的 压力 面 输入 流 , 人力 输出 流 , 人力 期望 输入 流 , 人力 期望 输出 流 , 人力 舒适 度 , 低 可控 性 , 易
A 2 ( t 1 ) = 调节 , 支配 对象 , 转轴 施动 对象 , 电机 功能 表面 , 转轴 内表 面 输入 流 , 电能 输出 流 , 转矩 期望 输入 流 , 电能 期望 输出 流 , 转矩 对应 结构 , 电机 、 转轴 切割 效率 , 高 与人 作用 关系 , 间接 调节 转速 可控 性 , 易
A c ( t 0 ) = 按压 、 旋转 , 支配 对象 , 机头 施动 对象 , 双手 功能 表面 , 按钮 按压 面、 机头 按压 面 输入 流 , 人力 输出 流 , 人力 期望 输入 流 , 人力 期望 输出 流 , 人力 舒适 度 , 高 可控 性 , 一般
A 3 ( t 0 ) = 调整 , 支配 对象 , 机头 施动 对象 , 手 功能 表面 , 机头 按压 面 输入 流 , 人力 输出 流 , 人力 期望 输入 流 , 人力 期望 输出 流 , 人力 对应 结构 , 机头 、 调节 按钮 与人 作用 关系 , 直接 控制 机头 角度 舒适 度 , 一般 可控 性 , 易
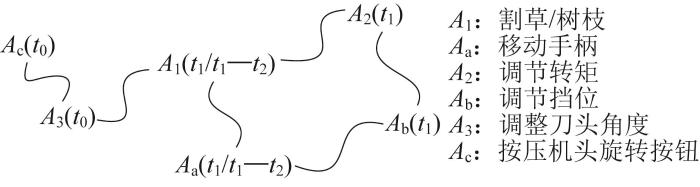
构建上述备选问题功能元的相关分析网,以分析备选问题功能元的相关性,并结合问题功能元的可拓表达,确定备选问题功能元选项。割草机备选问题功能元的相关分析网如图10 所示。
图10
图10
电动割草机问题功能元相关分析网
Fig.10
Correlation analysis network for problem function elements of electric lawn mower
由备选问题功能元的可拓表达和相关分析可知:①“调节挡位”功能元出现问题,属于人为误操作;②“调节转矩”功能元对应的机构出现问题,将其列为备选问题功能元选项3;③“调节挡位、调节转矩”人机功能元出现问题,属于产品机构不满足人机交互要求问题,将其列为备选问题功能元选项4;④“调节挡位、调节转矩”人机功能元以及“移动手柄、割草/树枝”人机功能元为串联关系,操作者既要调节挡位,又要移动手柄,产品使用不满足人机交互顺序,将其列为备选问题功能元选项5;⑤“按压机头旋转按钮”功能元出现问题,导致机头角度没调节好,属于人为误操作;⑥“调整刀头角度”功能元对应的机构出现问题,将其列为备选问题功能元选项6;⑦“按压机头旋转按钮、调整刀头角度”人机功能元出现问题,属于产品机构不满足人机交互要求问题,将其列为备选问题功能元选项7;⑧“按压机头旋转按钮、调整刀头角度”人机功能元以及“移动手柄、割草/树枝”人机功能元为串联关系,但两者不是同时进行,相互影响小,不作为备选问题功能元选项。
6)确定最终问题功能元。根据上述分析结果,汇总割草机的所有备选问题功能元选项,如表1 所示。
通过分析割草机备选问题功能元的产生可能性、可控性以及人机交互的舒适度,结合问题表象判断备选问题功能元选项2和5是导致人体疲劳以及切割效率低的主要问题功能元,由此确定最终问题功能元为“移动手柄、割草/树枝”人机功能元以及“调节挡位、调节转矩”人机功能元。
4.2 冲突区域的确定
确定的最终问题功能元为“移动手柄、割草/树枝”人机功能元以及“调节挡位、调节转矩”人机功能元。基于上述问题功能元,建立基于功能表面的割草机功能关系模型,如图11 所示。
图11
图11
基于功能表面的电动割草机功能关系模型
Fig.11
Functional relationship model of electric lawn mower based on functional surfaces
利用所构建的割草机功能关系模型,初步确定初始冲突区域:刀头与杂草/树枝之间的不良作用、手与手柄之间的不良作用。对初始冲突区域中的元件和不良作用进行可拓表达,分别表示为:
P 1 = 刀头 , 半径 , 12 c m 功能 , 切割 功能 表面 , 切割 表面 质量 , 1 k g 形状 , 圆形 材质 , 不锈 钢
P 2 = 草 , 长度 , 5 c m 以上 功能 表面 , 草的 切面 硬度 , 偏软
D 1 = 切割 , 支配 对象 , 草 施动 对象 , 刀头 定位 表面 , 草的 切面 使定 表面 , 刀头 切割 面 动力 , 电力 和人 力 切割 高度 , 距地 面 5 c m 切割 角度 , 平行 地面
P 3 = 右手 , 状态 , 抓握 承重 , 2 k g 功能 , 调节 切割 速度 功能 表面 , 手掌 内表 面
P 4 = 左手 , 状态 , 抓握 承重 , 2 k g 摆动 幅度 , 小于 120 ° 功能 , 控制 切割 方向 及高 度 功能 表面 , 四指 内表 面
P 5 = 手柄 , 长度 , 13 c m 受力 , 不均 功能 , 抓握 功能 表面 , 手柄 抓握 表面 距刀 头距 离 , 130 c m
P 6 = 辅助 手柄 , 长度 , 8 c m 受力 , 不均 形状 , 圆形 功能 , 辅助 抓握 功能 表面 , 辅助 手柄 抓握 面 距刀 头距 离 , 100 c m
D 2 = 控制 , 支配 对象 , 手柄 施动 对象 , 右手 定位 表面 , 手柄 抓握 表面 使定 表面 , 手掌 内表 面 接受 对象 , 刀头 方式 , 人力 操作 力度 , 大 切割 状态 , 漏割 操作 力度 , 小 切割 状态 , 割不 动 切割 效率 , 低 力度 控制 , 不易
D 3 = 控制 , 支配 对象 , 辅助 手柄 施动 对象 , 左手 定位 表面 , 辅助 手柄 抓握 表面 使定 表面 , 左手 四指 内表 面 接受 对象 , 刀头 方式 , 人力 受力 , 不均 力度 控制 , 不易 承重 , 4 k g 摆动 幅度 , 大 控制 刀头 高度 , 不易
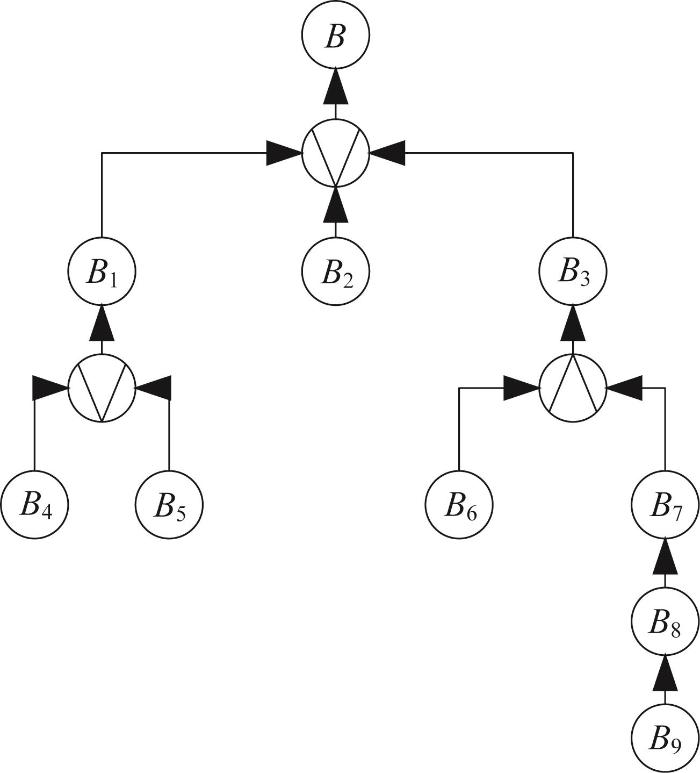
通过对初始冲突区域的可拓分析,得到冲突区域涉及以下问题:1)刀头材料、角度以及几何形状等导致容易卷草;2)杂草自身较为柔软,切割后容易倒在刀头上,影响后续切割;3)伸缩杆较长,不易控制整机高度和角度;4)人手要承受整机重量;5)操作动作不易控制力度;6)受到割草机作业时振动的影响。基于上述分析,构建割草机初始冲突区域的因果蕴含分析图,如图12 所示。图中:B =(刀头,切割效率,低);B 1 =(刀头,结构,易卷草);B 2 =(草,受力,易倒);B 3 =(刀头,高度和角度,不易控制);B 4 =(刀头,形状,易卷草);B 5 =(刀头,角度,易倾斜);B 6 =(伸缩杆,长度,过长);B 7 =(刀头,受力,不均);B 8 =(手,施力,过度);B 9 =(手柄、辅助手柄,承受重量,过大)。
图12
图12
电动割草机初始冲突区域的因果蕴含分析图
Fig.12
Causal containment analysis diagram of initial conflict zones of electric lawn mower
经过因果蕴含分析可知,造成割草效率低的关键问题为B 2 、B 4 、B 5 、B 6 、B 9 ,采用优度评价法对上述5个关键问题进行评价,筛选出最关键的问题。
1)确定衡量指标。根据割草机的使用情况和专家建议,得到4个最具代表性的指标。设衡量指标集J = { J 1 , J 2 , J 3 , J 4 } =
2)确定权重系数。采用德尔菲法评价割草机设计方案的衡量指标。确定4个衡量指标的权重系数分别为:α 1 = 0.4 α 2 = 0.3 α 3 = 0.1 α 4 = 0.2
3)首次评价。首次评价的目的是去除不满足必要条件的对象。由于杂草的属性不属于人机工程问题研究范围,且不满足可控性的要求,因此将问题B 2 排除。
4)建立关联函数并计算关联度。假定割草机的切割效率、舒适度、可控性和性能提升度对应的量值区间均为[0, 10],量值越大,说明衡量指标的特征越明显。通过分析得到4个关键问题的衡量指标的量值,如表2 所示。
根据关联度K i = K i ( B 1 ) , K i ( B 2 ) , ⋯ , K i ( B m ) ( i = 1 , 2 , ⋯ , l ) B 4 、 B 5 、 B 6 、 B 9 K 1 = ( 6 , 5 , 7 , 8 ) K 2 = ( 4 , 4 , 6 , 9 ) K 3 = ( 4 , 7 , 8 , 7 ) K 4 = ( 6 , 5 , 5 , 8 )
由规范关联度K i ( B j ) = K i ( B j ) / m a x j = 1 m K i ( B j ) ( i = 1 , 2 , ⋯ , l ; j = 1 , 2 , ⋯ , m ) B 4 、B 5 、B 6 、 B 9 K 1 ( B 4 ) ≈ ( 0.75 , 0.63 , 0.88 , 1 ) K 2 ( B 5 ) ≈ ( 0.44 , 0.44 , 0.67 , 1 ) K 3 (B 6 ) ≈ (0.5 , 0.88, 1, 1),K 4 (B 9 ) ≈ (0.75 , 0.63, 0.63, 1)。
5)计算关键问题的优度。由C ( B j ) = ( α 1 , α 2 , … , α l ) K 1 ( B 1 ) , K 2 ( B 2 ) , ⋯ , K i ( B j ) T ( i = 1 , 2 , … , l ; j = 1 , 2 , … , m ) C ( B 4 ) = 0.63 C ( B 5 ) = 0.59 C ( B 6 ) = 0.77 C ( B 9 ) = 1.00
优度越大,说明问题越关键。由此确定最关键的问题为B 9 ,即最终冲突区域在人手与手柄、辅助手柄之间。
4.3 不良作用的求解
通过分析可知,割草机的割草效率低,有时甚至出现无法割到草的最终冲突区域确定在人手与手柄、辅助手柄之间。操作者通过2个手柄控制刀头的切割高度和角度,将冲突区域转化为物质-场模型,得到操作者与手柄、辅助手柄之间的非充分交互作用,如图13 所示。
图13
图13
操作者与电动割草机手柄之间的物质-场模型
Fig.13
Matter-field model between operator and electric lawn mower handle
若要解决操作者对割草机手柄的非充分交互作用,可以选择1类或2类标准解进行求解。例如1.1.3标准解法3:在手柄不变的情况下,可以在刀头或伸缩杆上设置1个可调节支架,在支撑割草机重量的同时可以控制切割高度,使得操作者只通过手柄即可控制切割角度,从而实现有效的交互作用。2.1.2标准解法15:在不添加新元件的基础上,利用人力和驱动力共同控制割草机的移动速度和范围。
在运用1类、2类标准解对不良作用进行求解后,利用3类标准解完善上述方案。根据3.1.1标准解法37,共得到4种可解决手与手柄之间不良交互问题的设计方案。方案Z 1 :在伸缩杆上添加可拆卸的支架和辅助轮,支架高度可调,割草机刀头设置成可左右旋转的刀头,将辅助手柄设计为三面可抓握的手柄。方案Z 2 :在伸缩杆两侧添加双辅助轮,在伸缩杆中添加电动装置,以人力和电力共同驱动,调节切割高度。方案Z 3 :在刀头下方添加辅助轮,加大调速开关的手握面积,同时设置双锁定开关,便于用户调速和锁定。方案Z 4 :在辅助手柄和手柄上同时加装减振装置,刀头两侧添加可拆卸辅助轮。
应用优度评价法对上述4种设计方案进行评价,以筛选最优设计方案。
1)确定衡量指标。同样,根据割草机的使用情况和专家建议,设衡量指标集J ={J 1 , J 2 , J 3 , J 4 }={切割效率,舒适度,可控性,性能提升度}。
2)确定权重系数。采用德尔菲法评价割草机各设计方案的衡量指标。确定4个衡量指标的权重系数分别为:α 1 = 0.4 α 2 = 0.3 α 3 = 0.1 α 4 = 0.2
3)首次评价。割草机的切割效率是必要条件,上述4种方案均满足此条件。
4)建立关联函数并计算关联度。假定割草机的切割效率、舒适度、可控性和性能提升度对应的量值区间为[0, 10],量值越大,说明衡量指标的特征越明显。通过分析得到4个方案的衡量指标的量值,如表3 所示。
由关联度K i = K i ( Z 1 ) , K i ( Z 2 ) , … , K i ( Z m ) ( i = 1 , 2 , … , l ) Z 1 、 Z 2 、 Z 3 、 Z 4 K 1 = ( 8 , 6 , 5 , 7 ) K 2 = ( 6 , 6 , 4 , 5 ) K 3 = ( 7 , 5 , 8 , 6 ) K 4 = ( 9 , 7 , 6 , 8 )
由K i ( Z j ) = K i ( Z j ) / m a x j = 1 m K i ( Z j ) ( i = 1 , 2 , ⋯ , l ; j = 1 , 2 , ⋯ , m ) Z 1 、 Z 2 、 Z 3 、 Z 4 K 1 ( Z 1 ) ≈ ( 1 , 0.75 , 0.63 , 0.88 ) K 2 ( Z 2 ) ≈ ( 1 , 1 , 0.67 , 0.83 ) K 3 ( Z 3 ) ≈ (0.88 , 0.63, 1, 1),K 4 ( Z 4 ) ≈ ( 1 , 0.88 , 0.75 , 1 )
5)计算各设计方案的优度。由C ( Z j ) = ( α 1 , α 2 , … , α l ) K 1 ( Z 1 ) , K 2 ( Z 2 ) , ⋯ , K i ( Z j ) T ( i = 1 , 2 , ⋯ , l ; j = 1 , 2 , … , m ) C ( Z 1 ) = 0.98 C ( Z 2 ) = 0.84 C ( Z 3 ) = 0.70 C ( Z 4 ) = 0.90
优度越大,割草机的切割效率越高且用户体验越好,最终确定最优设计方案为Z 1 ,如图14 所示。
图14
图14
改进后的电动割草机
Fig.14
Improved electric lawn mower
4.4 方案评价
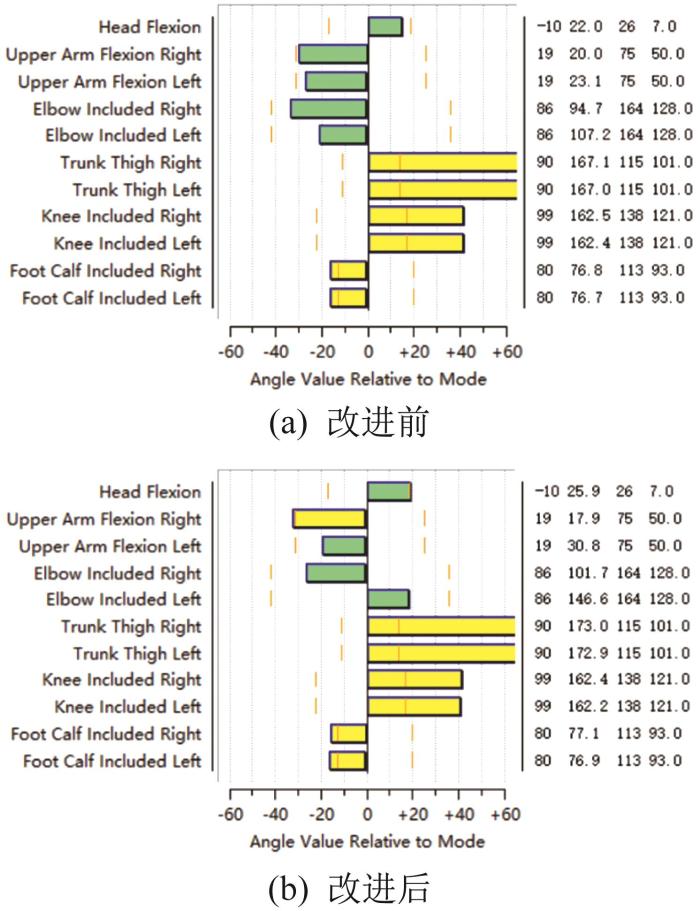
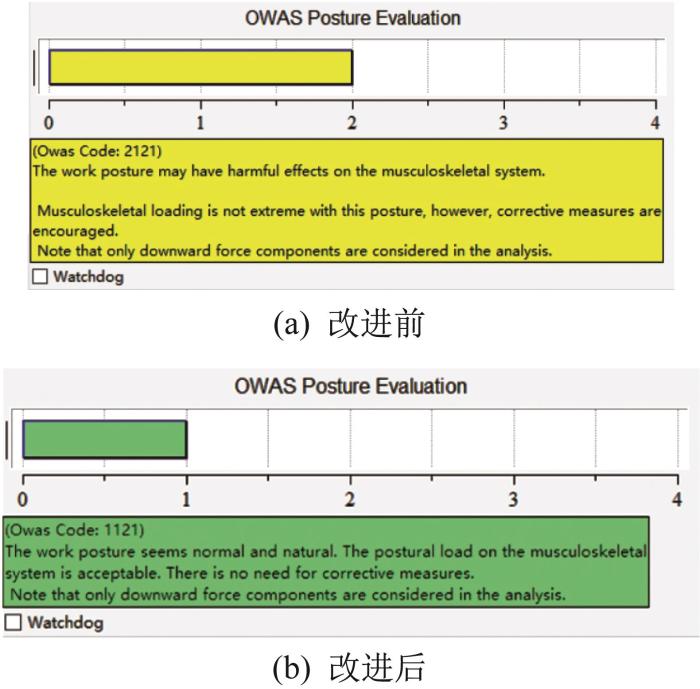
利用虚拟仿真软件Jack中的Comfort Assessment分析工具对改进前后电动割草机的使用舒适度进行对比分析,结果如图15 所示。同时,利用OWPA工具对电动割草机的作业姿势进行对比分析,结果如图16 所示。
图15
图15
改进前后电动割草机的舒适度对比
Fig.15
Comparison of comfort of electric lawn mower before and after improvement
图16
图16
改进前后电动割草机的作业姿势对比
Fig.16
Comparison of working posture of electric lawn mower before and after improvement
通过对改进前后的电动割草机进行虚拟仿真对比分析可知,由于加入了可拆卸辅助轮,操作者可以单手控制手柄进行推进式割草,无需承受割草机的重量,且还能有效控制切割高度,舒适度明显提升,且作业姿势也更加符合人机交互要求。
改进前电动割草机的整机质量约为2.35 kg,在操作过程中人手不仅要承受整机重量,还要控制切割高度和角度,时间越久切割效率越低。加装可拆卸辅助轮后,操作者在进行推进式切割的同时可三面抓握辅助手柄,有助于推进式切割和移动式切割交替进行,单位时间内切割面积增大且切割速度加快,效率明显提高。
改进前,电动割草机的机身长度为90~120 cm,操作者不易控制刀头的高度和角度,切割平整度较低。改进后,加装的辅助轮有助于控制切割高度和平整度,可旋转刀头利于切割树枝,三面可抓握的辅助手柄适用于不同操作姿势,可控性显著提高。
改进前,电动割草机的辅助手柄不利于横向发力,切割效率随时间不断下降,切割平整度极差,刀头不适用于垂直切割。改进后,刀头可实现4个方向上的角度调节,适用于多种切割方式;同时,改进的手柄和辅助轮提升了切割效率、平整度和稳定性,有效提高了产品的人机交互性能。
5 结 论
1)以人机交互为主要研究出发点,采用功能表面和可拓工具研究人机工程问题的冲突区域。一方面,相比于传统的机械产品冲突区域确定方法,所提出的方法增加了人机交互冲突区域的研究;另一方面,相比于虚拟仿真、图像分析等方法,所提出的方法更加全面,可实现对人机交互和产品结构的一体化研究。
2)在功能过程模型和功能关系模型的基础上,利用功能表面驱动,对问题功能元进行可拓表达及相关分析,使得最终问题功能元的确定更加具有方向性和逻辑性。通过功能表面构建人机功能关系模型,并利用蕴含分析确定最终的冲突区域,提高了最终冲突区域确定的精确性。
3)将可拓学工具中的优度评价、相关分析和因果蕴含分析等融合到基于功能表面的人机冲突区域确定过程中,提高了形式化程度,且易于算法化,为TRIZ、可拓学和功能表面的融合提供了新思路。
4)相关研究还有待开展,以进一步推进交互式产品的创新设计。如:本文将冲突区域转换为物质-场模型,主要考虑传统的场对人的作用,而缺少对广义场中其他场对人的作用关系的研究;人机工程问题优度评价指标的深入研究等。
参考文献
View Option
[1]
FELIPE M GABRIEL E DAVID T Ergonomics as a tool to improve the sustainability of the workforce
[J]. Work , 2017 , 57 (3 ): 339 -350 .
[本文引用: 1]
[3]
易军 ,汪默 基于实体交互的智能产品设计方法
[J].包装工程 ,2018 ,39 (2 ):107 -112 .
[本文引用: 1]
YI J WANG M Smart product design approach based on tangible interaction
[J]. Packaging Engineering , 2018 , 39 (2 ): 107 -112 .
[本文引用: 1]
[4]
JEONG G SELF J Mode-of-use innovation in interactive product development
[J]. Archives of Design Research , 2017 , 30 (1 ): 41 -59 .
[本文引用: 1]
[5]
DARANI S Z KAEDI M Improving the interactive genetic algorithm for customer-centric product design by automatically scoring the unfavorable designs
[J]. Human-centric Computing & Information Sciences , 2017 , 7 : 38 .
[本文引用: 1]
[6]
DING Y GUO F ZHANG X F et al Using event related potentials to identify a user’s behavioural intention aroused by product form design
[J]. Applied Ergonomics , 2016 , 55 : 117 -123 .
[本文引用: 1]
[7]
HOVANEC M Digital factory as a prerequisite for successful application in the area of ergonomics and human factor
[J]. Theoretical Issues in Ergonomics Science , 2016 , 18 (1 ): 35 -45 .
[本文引用: 1]
[10]
周有城 基于扩展功能模型的智能产品概念结构设计
[D].天津 :河北工业大学 ,2020 :30 -42 .
[本文引用: 1]
ZHOU Y C Concept structure design of intelligent product based on the extended function model
[D]. Tianjin : Hebei University of Technology , 2020 : 30 -42 .
[本文引用: 1]
[11]
崔伟伟 ,张爱国 ,翟进进 ,等 根原因与故障树相结合的冲突解决方法与应用
[J].机械设计 ,2020 ,37 (10 ):27 -34 .
[本文引用: 1]
CUI W W ZHANG A G ZHAI J J et al Method of conflict resolution and its application based on the combination of root cause and fault tree
[J]. Journal of Machine Design , 2020 , 37 (10 ): 27 -34 .
[本文引用: 1]
[12]
牛晓伟 困难功能元的发现与求解方法研究及其在勒紧打结器设计中的应用
[D].天津 :河北工业大学 ,2018 :15 -58 .
[本文引用: 1]
NIU X W Identification and solving method of difficult function elements and its application for tightening knotter design
[D]. Tianjin : Hebei University of Technology , 2018 : 15 -58 .
[本文引用: 1]
[13]
付敏 ,李萌 ,李荣峰 ,等 机械产品流功能模型构建与流进化路径研究
[J].计算机集成制造系统 ,2023 ,29 (4 ):1194 -1204 .
[本文引用: 1]
FU M LI M LI R F et al Construction of mechanical product flow function model and flow evolution path
[J]. Computer Integrated Manufacturing Systems , 2023 , 29 (4 ): 1194 -1204 .
[本文引用: 1]
[14]
谭若诗 ,张建辉 ,杨欣霖 ,等 基于裁剪的流程问题解决
[J].机械设计与研究 ,2017 ,33 (3 ):110 -115 ,125 .
[本文引用: 1]
TAN R S ZHANG J H YANG X L et al Trimming-based process problem solving
[J]. Machine Design & Research , 2017 , 33 (3 ): 110 -115 , 125 .
[本文引用: 1]
[16]
杨金勇 概念设计过程中产品功能的广义定位表达
[J].机械设计 ,2014 ,31 (6 ):6 -12 .
[本文引用: 1]
YANG J Y Generalized positioning expression of product function in conceptual design process
[J]. Journal of Machine Design , 2014 , 31 (6 ): 6 -12 .
[本文引用: 1]
[17]
杨波 ,高常青 ,王兴祖 ,等 基于单元模型的产品结构概念设计
[J].计算机集成制造系统 ,2014 ,20 (3 ):471 -485 .
[本文引用: 1]
YANG B GAO C Q WANG X Z et al Cell based product structure conceptual design
[J]. Computer Integrated Manufacturing Systems , 2014 , 20 (3 ): 471 -485 .
[本文引用: 1]
[19]
杨春燕 ,蔡文 可拓学 [M].北京 :科学出版社 ,2014 :10 -136 .
[本文引用: 3]
YANG C Y CAI W Extenics [M]. Beijing : Science Press , 2014 : 10 -136 .
[本文引用: 3]
[20]
刘晓敏 ,李娇蓉 ,陈亮 ,等 融合可拓学与多层次知识建模的仿生原型获取
[J].机械工程学报 ,2019 ,55 (21 ):150 -160 .
[本文引用: 1]
LIU X M LI J R CHEN L et al Bionic prototype acquisition incorporating extension and multi-level knowledge modeling
[J]. Journal of Mechanical Engineering , 2019 , 55 (21 ): 150 -160 .
[本文引用: 1]
[21]
李仔浩 ,杨春燕 基于逆向设计的产品可拓创意生成方法
[J].机械设计 ,2019 ,36 (12 ):127 -133 .
[本文引用: 1]
LI Z H YANG C Y Product extension creative generation method based on reverse design
[J]. Journal of Machine Design , 2019 , 36 (12 ): 127 -133 .
[本文引用: 1]
[22]
白仲航 ,王雯 ,周云漠 ,等 集成可拓学工具的裁剪创新方法研究
[J/OL].计算机集成制造系统 :1 -16 (2022-05-17 )[2023-02-08 ]..
URL
[本文引用: 1]
BAI Z H WANG W ZHOU Y M et al Trimming innovation method integrated with extenics tools
[J/OL]. Computer Integrated Manufacturing Systems : 1 -16 (2022-05-17 )[2023-02-08 ]. .
URL
[本文引用: 1]
[23]
高常青 ,杨波 ,吕杰 ,等 基于组件单元模型的冲突消除方法
[J].机械设计 ,2014 ,31 (7 ):1 -9 ,50 .
[本文引用: 1]
GAO C Q YANG B LÜ J et al Methodology of conflict solving based on component unit
[J]. Journal of Machine Design , 2014 , 31 (7 ): 1 -9 , 50 .
[本文引用: 1]
[25]
吕冰 ,陈梦佳 ,李泽群 ,等 基于功能流模型的青贮机械模块化设计
[J].机械设计 ,2018 ,35 (8 ):116 -120 .
[本文引用: 2]
LÜ B CHEN M J LI Z Q et al Modular design of silage machinery based on functional flow model
[J]. Journal of Machine Design , 2018 , 35 (8 ): 116 -120 .
[本文引用: 2]
[26]
WU C L ZHOU Y C PESSÔA M V P et al Conceptual digital twin modeling based on an integrated five-dimensional framework and TRIZ function model
[J]. Journal of Manufacturing Systems , 2021 , 58 (Part B ): 79 -93 .
[本文引用: 1]
[27]
[本文引用: 1]
YU F LIU F TAN R H et al Construction of multi-level trimming method set based on TRIZ
[J]. Journal of Mechanical Engineering , 2015 , 51 (21 ): 156 -164 .
DOI:10.3901/jme.2015.21.156
[本文引用: 1]
[28]
DOU J Z TANG Z LI H T et al Research on design evaluation of air-WMM by priority-degree evaluating method
[J]. Procedia Computer Science , 2019 , 162 : 166 -173 .
[本文引用: 1]
Ergonomics as a tool to improve the sustainability of the workforce
1
2017
... 随着经济与技术的发展,人们在关注产品功能的同时更加注重用户体验.传统的机械产品设计只注重功能、质量和成本等基本属性,忽略了人机性能,导致产品在舒适性、可控性等方面存在不足[1 ] .因此,准确识别产品的人机工程问题,提升产品的人机性能具有重要意义. ...
面向用户体验的交互式产品设计方法及其应用
1
2018
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
面向用户体验的交互式产品设计方法及其应用
1
2018
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
基于实体交互的智能产品设计方法
1
2018
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
基于实体交互的智能产品设计方法
1
2018
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
Mode-of-use innovation in interactive product development
1
2017
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
Improving the interactive genetic algorithm for customer-centric product design by automatically scoring the unfavorable designs
1
2017
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
Using event related potentials to identify a user’s behavioural intention aroused by product form design
1
2016
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
Digital factory as a prerequisite for successful application in the area of ergonomics and human factor
1
2016
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
基于虚拟仿真与TRIZ的产品人机工程问题解决方法研究
1
2020
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
基于虚拟仿真与TRIZ的产品人机工程问题解决方法研究
1
2020
... 对于人机工程问题的确定,常用的方法有4种.第1种是问卷调查法,即直接通过问卷结果总结产品的人机工程问题.第2种是实验法.杨玲等[2 -3 ] 通过对交互式产品过去的交互方式与未来的交互情景进行比较,提出了一种VIP(vision in product,产品视觉)设计方法,用于改进产品交互中的问题.第3种是数学法.Jeong等[4 ] 提出了产品交互风格分类法及产品体验评估法,解决了交互式产品使用模式的设计和评估问题;Darani等[5 -6 ] 提出了一种改进的交互式遗传算法,通过将用户需求融入交互式产品设计,减轻了用户使用产品时的疲劳程度.第4种是虚拟仿真法.Hovanec等[7 -8 ] 通过在仿真环境中利用虚拟人对产品的安全性和可靠性进行分析,确定了产品的人机工程问题,从而实现了产品人机性能的不断优化.综上,国内外已有研究主要通过图像分析、数学模型或虚拟仿真等方法来确定人机工程问题,缺乏对人机工程问题与产品内部结构的一体化系统研究,导致人机工程问题识别不全面以及准确性低. ...
基于功能关系模型和过程模型的冲突区域确定方法研究
3
2019
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
... [9 ,14 ]利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
... TRIZ(Teoriya Resheniya Izobreatatelskikh Zadatc,发明问题解决理论)中的功能模型分为2种:功能过程模型和功能关系模型.功能过程模型是指功能元按照产品的能量流、物质流及信息流的输入和输出进行串联或并联,最终形成一个有向网络图的过程[9 ] .它不仅能描述产品系统中流的转换过程,还能描述各分功能之间的关系,可为确定问题功能元提供理论基础[25 -26 ] .功能关系模型是由系统边界内的元件、制品、超系统及其作用关系组成的功能网络[27 ] ,它建立在元件分析、相互作用和功能分析的基础上,用于表示问题功能元中各元件之间的作用关系.2种功能模型充分考虑了功能实现的过程和元件间的作用关系,对冲突区域的识别具有至关重要的作用. ...
基于功能关系模型和过程模型的冲突区域确定方法研究
3
2019
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
... [9 ,14 ]利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
... TRIZ(Teoriya Resheniya Izobreatatelskikh Zadatc,发明问题解决理论)中的功能模型分为2种:功能过程模型和功能关系模型.功能过程模型是指功能元按照产品的能量流、物质流及信息流的输入和输出进行串联或并联,最终形成一个有向网络图的过程[9 ] .它不仅能描述产品系统中流的转换过程,还能描述各分功能之间的关系,可为确定问题功能元提供理论基础[25 -26 ] .功能关系模型是由系统边界内的元件、制品、超系统及其作用关系组成的功能网络[27 ] ,它建立在元件分析、相互作用和功能分析的基础上,用于表示问题功能元中各元件之间的作用关系.2种功能模型充分考虑了功能实现的过程和元件间的作用关系,对冲突区域的识别具有至关重要的作用. ...
基于扩展功能模型的智能产品概念结构设计
1
2020
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
基于扩展功能模型的智能产品概念结构设计
1
2020
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
根原因与故障树相结合的冲突解决方法与应用
1
2020
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
根原因与故障树相结合的冲突解决方法与应用
1
2020
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
困难功能元的发现与求解方法研究及其在勒紧打结器设计中的应用
1
2018
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
困难功能元的发现与求解方法研究及其在勒紧打结器设计中的应用
1
2018
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
机械产品流功能模型构建与流进化路径研究
1
2023
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
机械产品流功能模型构建与流进化路径研究
1
2023
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
基于裁剪的流程问题解决
1
2017
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
基于裁剪的流程问题解决
1
2017
... 冲突区域是指功能模型中与问题相关的区域[9 ] .功能模型将产品的功能和结构一体化研究,可以明确问题发生的具体空间位置,进而有效地确定正确的问题[10 ] .目前,冲突区域诊断方法主要有3种.第1种是基于因果链或因果树的诊断方法[11 ] ,即先通过建立功能关系模型来确定冲突区域,再建立因果链或因果树来确定冲突.第2种是基于层次型功能模型的冲突区域诊断方法,即利用功能结构中流和功能的作用关系来确定冲突区域.牛晓伟等[12 -13 ] 通过分析功能元的约束类型,完善了物质流、能量流和信息流的进化路径,解决了功能模型识别流的问题,提升了产品创新设计的效率和质量.第3种是基于关系型功能模型的冲突区域诊断方法,即先利用功能关系模型确定初始冲突区域,再通过识别根原因来确定最终冲突区域.张换高等[9 ,14 ] 利用功能过程模型表达与时间/顺序有关的信息,并提出了一种从问题功能到问题结构的冲突区域确定方法,解决了冲突区域分析不全面的问题.在实际应用中,3种冲突区域诊断方法往往结合使用.然而,功能模型虽可以确定产品功能、结构、流程等对应的冲突区域,但未涉及人机之间的作用关系,缺乏对人机冲突区域的识别. ...
面向生长型设计的制造信息模型
1
2014
... 功能表面是组成机械产品结构的最小抽象物质单元,其不仅可以表达产品结构表面的功能特征,也可以形式化表达产品结构的几何特征[15 ] .杨金勇[16 ] 基于功能表面的定位功能,提出了一种可以广义定位表达产品功能的模型,解决了功能结构之间直接映射导致的病态性等问题;杨波等[17 -18 ] 将功能表面扩展并重新关联,以构成新的产品结构骨架,从而完成产品的创新设计.拓展研究人与产品的接触功能表面有助于实现对人机工程问题中交互功能和内部交互结构的一体化分析.功能表面既是产品结构之间的“桥梁”,又是人与产品之间的“桥梁”,拓展研究人与产品、产品内部结构之间的功能表面有助于解决功能模型中人机冲突区域的识别问题. ...
面向生长型设计的制造信息模型
1
2014
... 功能表面是组成机械产品结构的最小抽象物质单元,其不仅可以表达产品结构表面的功能特征,也可以形式化表达产品结构的几何特征[15 ] .杨金勇[16 ] 基于功能表面的定位功能,提出了一种可以广义定位表达产品功能的模型,解决了功能结构之间直接映射导致的病态性等问题;杨波等[17 -18 ] 将功能表面扩展并重新关联,以构成新的产品结构骨架,从而完成产品的创新设计.拓展研究人与产品的接触功能表面有助于实现对人机工程问题中交互功能和内部交互结构的一体化分析.功能表面既是产品结构之间的“桥梁”,又是人与产品之间的“桥梁”,拓展研究人与产品、产品内部结构之间的功能表面有助于解决功能模型中人机冲突区域的识别问题. ...
概念设计过程中产品功能的广义定位表达
1
2014
... 功能表面是组成机械产品结构的最小抽象物质单元,其不仅可以表达产品结构表面的功能特征,也可以形式化表达产品结构的几何特征[15 ] .杨金勇[16 ] 基于功能表面的定位功能,提出了一种可以广义定位表达产品功能的模型,解决了功能结构之间直接映射导致的病态性等问题;杨波等[17 -18 ] 将功能表面扩展并重新关联,以构成新的产品结构骨架,从而完成产品的创新设计.拓展研究人与产品的接触功能表面有助于实现对人机工程问题中交互功能和内部交互结构的一体化分析.功能表面既是产品结构之间的“桥梁”,又是人与产品之间的“桥梁”,拓展研究人与产品、产品内部结构之间的功能表面有助于解决功能模型中人机冲突区域的识别问题. ...
概念设计过程中产品功能的广义定位表达
1
2014
... 功能表面是组成机械产品结构的最小抽象物质单元,其不仅可以表达产品结构表面的功能特征,也可以形式化表达产品结构的几何特征[15 ] .杨金勇[16 ] 基于功能表面的定位功能,提出了一种可以广义定位表达产品功能的模型,解决了功能结构之间直接映射导致的病态性等问题;杨波等[17 -18 ] 将功能表面扩展并重新关联,以构成新的产品结构骨架,从而完成产品的创新设计.拓展研究人与产品的接触功能表面有助于实现对人机工程问题中交互功能和内部交互结构的一体化分析.功能表面既是产品结构之间的“桥梁”,又是人与产品之间的“桥梁”,拓展研究人与产品、产品内部结构之间的功能表面有助于解决功能模型中人机冲突区域的识别问题. ...
基于单元模型的产品结构概念设计
1
2014
... 功能表面是组成机械产品结构的最小抽象物质单元,其不仅可以表达产品结构表面的功能特征,也可以形式化表达产品结构的几何特征[15 ] .杨金勇[16 ] 基于功能表面的定位功能,提出了一种可以广义定位表达产品功能的模型,解决了功能结构之间直接映射导致的病态性等问题;杨波等[17 -18 ] 将功能表面扩展并重新关联,以构成新的产品结构骨架,从而完成产品的创新设计.拓展研究人与产品的接触功能表面有助于实现对人机工程问题中交互功能和内部交互结构的一体化分析.功能表面既是产品结构之间的“桥梁”,又是人与产品之间的“桥梁”,拓展研究人与产品、产品内部结构之间的功能表面有助于解决功能模型中人机冲突区域的识别问题. ...
基于单元模型的产品结构概念设计
1
2014
... 功能表面是组成机械产品结构的最小抽象物质单元,其不仅可以表达产品结构表面的功能特征,也可以形式化表达产品结构的几何特征[15 ] .杨金勇[16 ] 基于功能表面的定位功能,提出了一种可以广义定位表达产品功能的模型,解决了功能结构之间直接映射导致的病态性等问题;杨波等[17 -18 ] 将功能表面扩展并重新关联,以构成新的产品结构骨架,从而完成产品的创新设计.拓展研究人与产品的接触功能表面有助于实现对人机工程问题中交互功能和内部交互结构的一体化分析.功能表面既是产品结构之间的“桥梁”,又是人与产品之间的“桥梁”,拓展研究人与产品、产品内部结构之间的功能表面有助于解决功能模型中人机冲突区域的识别问题. ...
基于功构映射的拆卸设备设计方法
1
2019
... 功能表面是组成机械产品结构的最小抽象物质单元,其不仅可以表达产品结构表面的功能特征,也可以形式化表达产品结构的几何特征[15 ] .杨金勇[16 ] 基于功能表面的定位功能,提出了一种可以广义定位表达产品功能的模型,解决了功能结构之间直接映射导致的病态性等问题;杨波等[17 -18 ] 将功能表面扩展并重新关联,以构成新的产品结构骨架,从而完成产品的创新设计.拓展研究人与产品的接触功能表面有助于实现对人机工程问题中交互功能和内部交互结构的一体化分析.功能表面既是产品结构之间的“桥梁”,又是人与产品之间的“桥梁”,拓展研究人与产品、产品内部结构之间的功能表面有助于解决功能模型中人机冲突区域的识别问题. ...
基于功构映射的拆卸设备设计方法
1
2019
... 功能表面是组成机械产品结构的最小抽象物质单元,其不仅可以表达产品结构表面的功能特征,也可以形式化表达产品结构的几何特征[15 ] .杨金勇[16 ] 基于功能表面的定位功能,提出了一种可以广义定位表达产品功能的模型,解决了功能结构之间直接映射导致的病态性等问题;杨波等[17 -18 ] 将功能表面扩展并重新关联,以构成新的产品结构骨架,从而完成产品的创新设计.拓展研究人与产品的接触功能表面有助于实现对人机工程问题中交互功能和内部交互结构的一体化分析.功能表面既是产品结构之间的“桥梁”,又是人与产品之间的“桥梁”,拓展研究人与产品、产品内部结构之间的功能表面有助于解决功能模型中人机冲突区域的识别问题. ...
3
2014
... 功能表面虽能解决人机冲突区域识别问题,但仅靠功能表面和功能模型得不到产品的不良功能、结构之间的相关关系,即无法有效完成人机工程问题冲突区域的确定.可拓学[19 ] 以形式化的方式描述客观世界中的事、物及其关系,利用拓展、变换等来研究事物的创新规律.刘晓敏等[20 -21 ] 基于可拓基元理论及形式化的描述方法,完成了产品与生物的多层次拓展以及仿生原型的获取,解决了产品设计中创意矛盾的问题;白仲航等[22 ] 提出了一种集成可拓工具的裁剪创新方法,运用基元来表达被裁剪元件的有用功能,解决了裁剪后寻找代替资源的随机性问题.由此可知,可拓工具和其他创新方法的融合可以针对性地解决某类矛盾问题[19 ] . ...
... [19 ]. ...
... 可拓表达是指将事与物、特征及相应量值以三元组的形式表达[19 ] .相关分析是指通过定量化分析基元间的逻辑关系来表达事物间的相关关系和作用机理.蕴含分析是指以基元形式表达和分析事、物及其关系的蕴含性.蕴含系包含上位基元和下位基元,2种基元具有“与”或者“或”的关系.在蕴含系中解决矛盾问题的路径是找到易实现的下位基元.优度评价是可拓学中评价和筛选事物的基本方法[28 ] .该方法先建立与评价对象相关的多指标参数,再利用关联函数定量化描述事物,最后以客观数据来表示评定结果,从而实现对评价对象综合水平的客观了解. ...
3
2014
... 功能表面虽能解决人机冲突区域识别问题,但仅靠功能表面和功能模型得不到产品的不良功能、结构之间的相关关系,即无法有效完成人机工程问题冲突区域的确定.可拓学[19 ] 以形式化的方式描述客观世界中的事、物及其关系,利用拓展、变换等来研究事物的创新规律.刘晓敏等[20 -21 ] 基于可拓基元理论及形式化的描述方法,完成了产品与生物的多层次拓展以及仿生原型的获取,解决了产品设计中创意矛盾的问题;白仲航等[22 ] 提出了一种集成可拓工具的裁剪创新方法,运用基元来表达被裁剪元件的有用功能,解决了裁剪后寻找代替资源的随机性问题.由此可知,可拓工具和其他创新方法的融合可以针对性地解决某类矛盾问题[19 ] . ...
... [19 ]. ...
... 可拓表达是指将事与物、特征及相应量值以三元组的形式表达[19 ] .相关分析是指通过定量化分析基元间的逻辑关系来表达事物间的相关关系和作用机理.蕴含分析是指以基元形式表达和分析事、物及其关系的蕴含性.蕴含系包含上位基元和下位基元,2种基元具有“与”或者“或”的关系.在蕴含系中解决矛盾问题的路径是找到易实现的下位基元.优度评价是可拓学中评价和筛选事物的基本方法[28 ] .该方法先建立与评价对象相关的多指标参数,再利用关联函数定量化描述事物,最后以客观数据来表示评定结果,从而实现对评价对象综合水平的客观了解. ...
融合可拓学与多层次知识建模的仿生原型获取
1
2019
... 功能表面虽能解决人机冲突区域识别问题,但仅靠功能表面和功能模型得不到产品的不良功能、结构之间的相关关系,即无法有效完成人机工程问题冲突区域的确定.可拓学[19 ] 以形式化的方式描述客观世界中的事、物及其关系,利用拓展、变换等来研究事物的创新规律.刘晓敏等[20 -21 ] 基于可拓基元理论及形式化的描述方法,完成了产品与生物的多层次拓展以及仿生原型的获取,解决了产品设计中创意矛盾的问题;白仲航等[22 ] 提出了一种集成可拓工具的裁剪创新方法,运用基元来表达被裁剪元件的有用功能,解决了裁剪后寻找代替资源的随机性问题.由此可知,可拓工具和其他创新方法的融合可以针对性地解决某类矛盾问题[19 ] . ...
融合可拓学与多层次知识建模的仿生原型获取
1
2019
... 功能表面虽能解决人机冲突区域识别问题,但仅靠功能表面和功能模型得不到产品的不良功能、结构之间的相关关系,即无法有效完成人机工程问题冲突区域的确定.可拓学[19 ] 以形式化的方式描述客观世界中的事、物及其关系,利用拓展、变换等来研究事物的创新规律.刘晓敏等[20 -21 ] 基于可拓基元理论及形式化的描述方法,完成了产品与生物的多层次拓展以及仿生原型的获取,解决了产品设计中创意矛盾的问题;白仲航等[22 ] 提出了一种集成可拓工具的裁剪创新方法,运用基元来表达被裁剪元件的有用功能,解决了裁剪后寻找代替资源的随机性问题.由此可知,可拓工具和其他创新方法的融合可以针对性地解决某类矛盾问题[19 ] . ...
基于逆向设计的产品可拓创意生成方法
1
2019
... 功能表面虽能解决人机冲突区域识别问题,但仅靠功能表面和功能模型得不到产品的不良功能、结构之间的相关关系,即无法有效完成人机工程问题冲突区域的确定.可拓学[19 ] 以形式化的方式描述客观世界中的事、物及其关系,利用拓展、变换等来研究事物的创新规律.刘晓敏等[20 -21 ] 基于可拓基元理论及形式化的描述方法,完成了产品与生物的多层次拓展以及仿生原型的获取,解决了产品设计中创意矛盾的问题;白仲航等[22 ] 提出了一种集成可拓工具的裁剪创新方法,运用基元来表达被裁剪元件的有用功能,解决了裁剪后寻找代替资源的随机性问题.由此可知,可拓工具和其他创新方法的融合可以针对性地解决某类矛盾问题[19 ] . ...
基于逆向设计的产品可拓创意生成方法
1
2019
... 功能表面虽能解决人机冲突区域识别问题,但仅靠功能表面和功能模型得不到产品的不良功能、结构之间的相关关系,即无法有效完成人机工程问题冲突区域的确定.可拓学[19 ] 以形式化的方式描述客观世界中的事、物及其关系,利用拓展、变换等来研究事物的创新规律.刘晓敏等[20 -21 ] 基于可拓基元理论及形式化的描述方法,完成了产品与生物的多层次拓展以及仿生原型的获取,解决了产品设计中创意矛盾的问题;白仲航等[22 ] 提出了一种集成可拓工具的裁剪创新方法,运用基元来表达被裁剪元件的有用功能,解决了裁剪后寻找代替资源的随机性问题.由此可知,可拓工具和其他创新方法的融合可以针对性地解决某类矛盾问题[19 ] . ...
集成可拓学工具的裁剪创新方法研究
1
1
... 功能表面虽能解决人机冲突区域识别问题,但仅靠功能表面和功能模型得不到产品的不良功能、结构之间的相关关系,即无法有效完成人机工程问题冲突区域的确定.可拓学[19 ] 以形式化的方式描述客观世界中的事、物及其关系,利用拓展、变换等来研究事物的创新规律.刘晓敏等[20 -21 ] 基于可拓基元理论及形式化的描述方法,完成了产品与生物的多层次拓展以及仿生原型的获取,解决了产品设计中创意矛盾的问题;白仲航等[22 ] 提出了一种集成可拓工具的裁剪创新方法,运用基元来表达被裁剪元件的有用功能,解决了裁剪后寻找代替资源的随机性问题.由此可知,可拓工具和其他创新方法的融合可以针对性地解决某类矛盾问题[19 ] . ...
集成可拓学工具的裁剪创新方法研究
1
1
... 功能表面虽能解决人机冲突区域识别问题,但仅靠功能表面和功能模型得不到产品的不良功能、结构之间的相关关系,即无法有效完成人机工程问题冲突区域的确定.可拓学[19 ] 以形式化的方式描述客观世界中的事、物及其关系,利用拓展、变换等来研究事物的创新规律.刘晓敏等[20 -21 ] 基于可拓基元理论及形式化的描述方法,完成了产品与生物的多层次拓展以及仿生原型的获取,解决了产品设计中创意矛盾的问题;白仲航等[22 ] 提出了一种集成可拓工具的裁剪创新方法,运用基元来表达被裁剪元件的有用功能,解决了裁剪后寻找代替资源的随机性问题.由此可知,可拓工具和其他创新方法的融合可以针对性地解决某类矛盾问题[19 ] . ...
基于组件单元模型的冲突消除方法
1
2014
... 功能表面是产品功能与结构的信息载体[23 ] ,其映射方式为功能—功能表面—结构.功能表面可表示为: ...
基于组件单元模型的冲突消除方法
1
2014
... 功能表面是产品功能与结构的信息载体[23 ] ,其映射方式为功能—功能表面—结构.功能表面可表示为: ...
基于功能表面的生长型设计理论
1
2008
... 其中:FS表示功能表面;M表示表面名称;T表示表面几何类型;F表示表面功能特征;G表示表面几何特征[24 ] . ...
基于功能表面的生长型设计理论
1
2008
... 其中:FS表示功能表面;M表示表面名称;T表示表面几何类型;F表示表面功能特征;G表示表面几何特征[24 ] . ...
基于功能流模型的青贮机械模块化设计
2
2018
... 根据定位对象的不同,将功能表面分为定位表面和使定表面.依据广义定位原理,功能表面的传递链从原动件的使定表面开始,传递到执行件的使定表面后结束[25 ] ,传递过程如图1 所示. ...
... TRIZ(Teoriya Resheniya Izobreatatelskikh Zadatc,发明问题解决理论)中的功能模型分为2种:功能过程模型和功能关系模型.功能过程模型是指功能元按照产品的能量流、物质流及信息流的输入和输出进行串联或并联,最终形成一个有向网络图的过程[9 ] .它不仅能描述产品系统中流的转换过程,还能描述各分功能之间的关系,可为确定问题功能元提供理论基础[25 -26 ] .功能关系模型是由系统边界内的元件、制品、超系统及其作用关系组成的功能网络[27 ] ,它建立在元件分析、相互作用和功能分析的基础上,用于表示问题功能元中各元件之间的作用关系.2种功能模型充分考虑了功能实现的过程和元件间的作用关系,对冲突区域的识别具有至关重要的作用. ...
基于功能流模型的青贮机械模块化设计
2
2018
... 根据定位对象的不同,将功能表面分为定位表面和使定表面.依据广义定位原理,功能表面的传递链从原动件的使定表面开始,传递到执行件的使定表面后结束[25 ] ,传递过程如图1 所示. ...
... TRIZ(Teoriya Resheniya Izobreatatelskikh Zadatc,发明问题解决理论)中的功能模型分为2种:功能过程模型和功能关系模型.功能过程模型是指功能元按照产品的能量流、物质流及信息流的输入和输出进行串联或并联,最终形成一个有向网络图的过程[9 ] .它不仅能描述产品系统中流的转换过程,还能描述各分功能之间的关系,可为确定问题功能元提供理论基础[25 -26 ] .功能关系模型是由系统边界内的元件、制品、超系统及其作用关系组成的功能网络[27 ] ,它建立在元件分析、相互作用和功能分析的基础上,用于表示问题功能元中各元件之间的作用关系.2种功能模型充分考虑了功能实现的过程和元件间的作用关系,对冲突区域的识别具有至关重要的作用. ...
Conceptual digital twin modeling based on an integrated five-dimensional framework and TRIZ function model
1
2021
... TRIZ(Teoriya Resheniya Izobreatatelskikh Zadatc,发明问题解决理论)中的功能模型分为2种:功能过程模型和功能关系模型.功能过程模型是指功能元按照产品的能量流、物质流及信息流的输入和输出进行串联或并联,最终形成一个有向网络图的过程[9 ] .它不仅能描述产品系统中流的转换过程,还能描述各分功能之间的关系,可为确定问题功能元提供理论基础[25 -26 ] .功能关系模型是由系统边界内的元件、制品、超系统及其作用关系组成的功能网络[27 ] ,它建立在元件分析、相互作用和功能分析的基础上,用于表示问题功能元中各元件之间的作用关系.2种功能模型充分考虑了功能实现的过程和元件间的作用关系,对冲突区域的识别具有至关重要的作用. ...
TRIZ辅助多层次裁剪方法集构建
1
2015
... TRIZ(Teoriya Resheniya Izobreatatelskikh Zadatc,发明问题解决理论)中的功能模型分为2种:功能过程模型和功能关系模型.功能过程模型是指功能元按照产品的能量流、物质流及信息流的输入和输出进行串联或并联,最终形成一个有向网络图的过程[9 ] .它不仅能描述产品系统中流的转换过程,还能描述各分功能之间的关系,可为确定问题功能元提供理论基础[25 -26 ] .功能关系模型是由系统边界内的元件、制品、超系统及其作用关系组成的功能网络[27 ] ,它建立在元件分析、相互作用和功能分析的基础上,用于表示问题功能元中各元件之间的作用关系.2种功能模型充分考虑了功能实现的过程和元件间的作用关系,对冲突区域的识别具有至关重要的作用. ...
TRIZ辅助多层次裁剪方法集构建
1
2015
... TRIZ(Teoriya Resheniya Izobreatatelskikh Zadatc,发明问题解决理论)中的功能模型分为2种:功能过程模型和功能关系模型.功能过程模型是指功能元按照产品的能量流、物质流及信息流的输入和输出进行串联或并联,最终形成一个有向网络图的过程[9 ] .它不仅能描述产品系统中流的转换过程,还能描述各分功能之间的关系,可为确定问题功能元提供理论基础[25 -26 ] .功能关系模型是由系统边界内的元件、制品、超系统及其作用关系组成的功能网络[27 ] ,它建立在元件分析、相互作用和功能分析的基础上,用于表示问题功能元中各元件之间的作用关系.2种功能模型充分考虑了功能实现的过程和元件间的作用关系,对冲突区域的识别具有至关重要的作用. ...
Research on design evaluation of air-WMM by priority-degree evaluating method
1
2019
... 可拓表达是指将事与物、特征及相应量值以三元组的形式表达[19 ] .相关分析是指通过定量化分析基元间的逻辑关系来表达事物间的相关关系和作用机理.蕴含分析是指以基元形式表达和分析事、物及其关系的蕴含性.蕴含系包含上位基元和下位基元,2种基元具有“与”或者“或”的关系.在蕴含系中解决矛盾问题的路径是找到易实现的下位基元.优度评价是可拓学中评价和筛选事物的基本方法[28 ] .该方法先建立与评价对象相关的多指标参数,再利用关联函数定量化描述事物,最后以客观数据来表示评定结果,从而实现对评价对象综合水平的客观了解. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}