


由于流体驱动具有驱动变形大、驱动安全、驱动机构制作简单等优势,软体机器人的驱动方式以流体驱动为主。目前,流体驱动的软体机器人需要外置的刚体泵和阀,这严重制约了其可携带性。随着电流体动力学(electrohydrodynamics,EHD)在电流体驱动技术上的运用,电流体泵的研究及应用也取得了长足发展[17-20]。因此,笔者基于EHD原理,提出了一种基于电流体泵驱动的柔性弯曲执行器。首先,设计了电流体泵样机,并通过实验测试了其性能;其次,通过理论和仿真分析论证了柔性执行器的弯曲性能;最后,将电流体泵样机与柔性执行器粘合装配成一体,通过实验验证了柔性弯曲执行器的弯曲性能。将电流体泵与柔性执行器高度集成,实现了柔性弯曲执行器的可携带性。
1 柔性弯曲执行器的结构及驱动原理
1.1 柔性弯曲执行器结构
柔性弯曲执行器的结构如图1所示,其由电流体泵(驱动装置)、柔性执行器和储液缸组成。其中:电流体泵外壳通过3D打印技术加工而成;柔性执行器和储液缸由硅胶浇注而成。通过SolidWorks软件构建柔性执行器模具,然后由3D打印机打印出模具实体,再通过软体硅胶倒模的方法浇注出柔性执行器。
图1
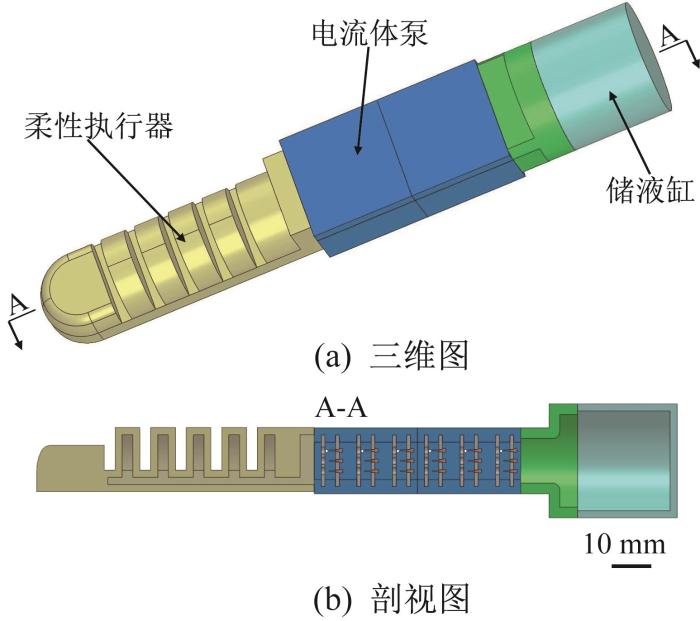
柔性弯曲执行器各部件的质量如表1所示。
表1 柔性弯曲执行器各部件的质量 (g)
Table 1
| 部件 | 质量 |
|---|---|
| 柔性执行器 | 16.2 |
| 电流体泵外壳 | 9.9 |
| 孔极板 | 2.4 |
| 针极板 | 1.2 |
| 连接器 | 5.0 |
| 储液缸 | 7.0 |
1.2 柔性弯曲执行器驱动原理
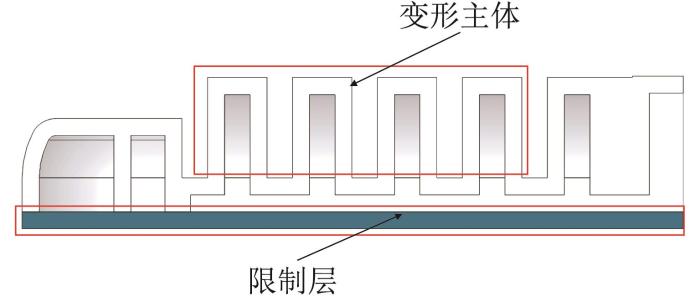
柔性执行器的结构如图2所示,其由变形主体和限制层组成。通过电流体泵将介电液注入柔性执行器内部腔室,执行器内腔压力增大,变形主体膨胀形变,而底部限制层的形变率远远小于变形主体的形变率,执行器向形变率小的那侧弯曲,从而实现柔性执行器的弯曲运动。
图2
2 电流体泵的工作原理及性能测试
2.1 电流体泵工作原理
电流体泵的结构如图3(a)所示,由外壳、针电极、孔电极和导线组成。其内部电极结构采用针极板与孔极板配对的形式。
图3
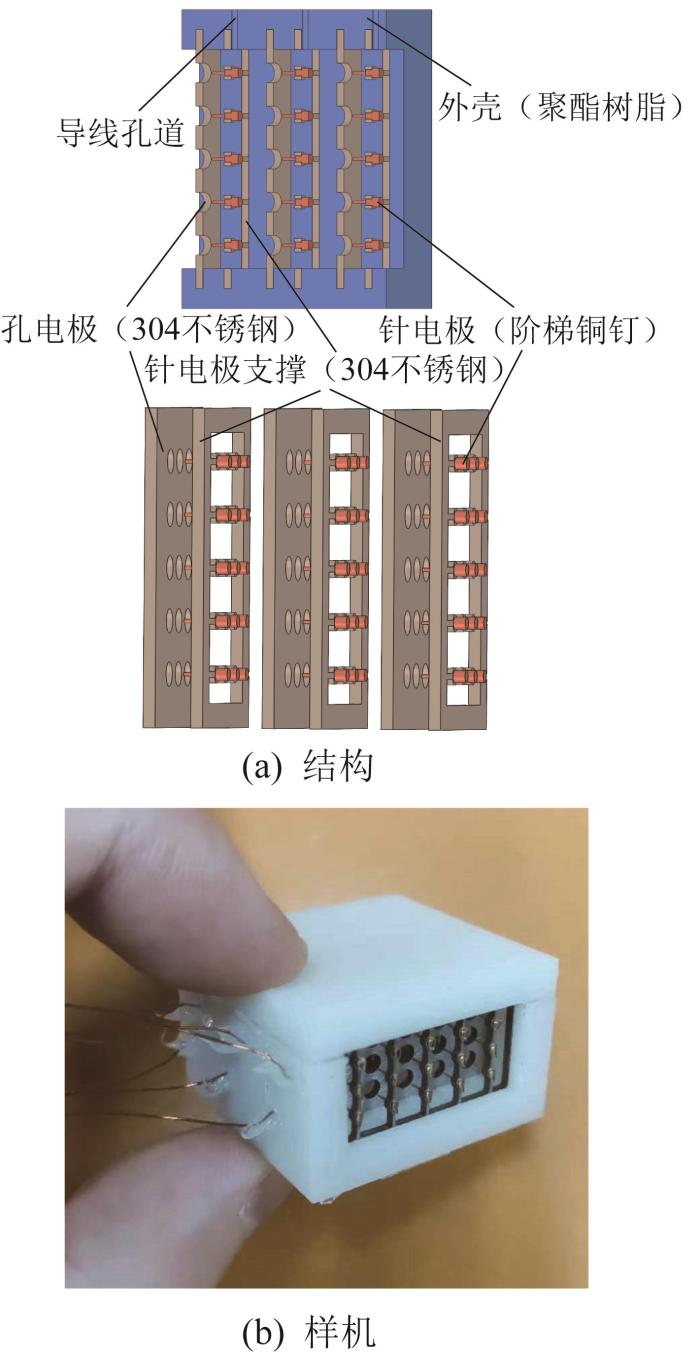
研究发现,电流体泵的驱动力随着针电极曲率半径的减小而增大[21]。本文所用针电极中阶梯铜钉的针尖直径为0.3 mm。针电极由阶梯铜钉与1 mm厚304不锈钢针电极支撑上的电极孔通过过盈配合装配而成。针电极支撑和孔电极板上的圆孔都通过激光切割加工而成。外壳材料为聚酯树脂,介电液选用无色透明、无毒、有特殊香味的乙酸芳樟酯。
设计的电流体泵可串联也可并联使用。电流体泵的工作原理如图4所示。图中3对正负电极平行排布,正负极分别接到高压模块的正负极上。电极没有通电时介电液呈电中性,通电后电极对之间产生不均匀电场,介电液被电离出正负离子。正离子沿着电场线方向向负极运动,未被电离的中性分子在正离子的拖拽下向负极运动。正离子在负极与电子结合恢复电中性并穿过孔电极形成压力射流。若一直保持通电状态,这个过程会一直进行下去,从而不断产生压力射流。
图4
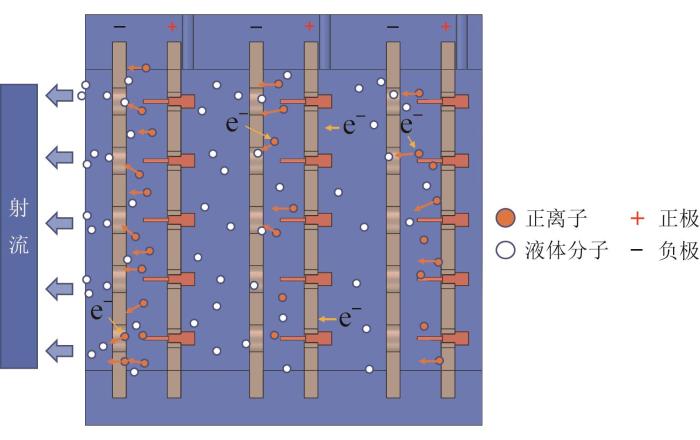
图4
电流体泵工作原理示意
Fig.4
Schematic diagram of working principle of electrohydrodynamic pump
2.2 电流体泵性能测试
输出流量和压强是衡量电流体泵性能的两大关键指标,流量反映了软体执行器的响应速度,压强决定了软体执行器的变形能力。笔者通过实验来分析泵针孔电极参数对电流体泵性能的影响。分别采用流量传感器和压强传感器测量电流体泵流量和压强的输出值。每组实验做3次,记录实验数据,并对数据进行分析。
保持电极孔直径2.0 mm不变,极板间距从1 mm逐渐增加到4 mm,调节好极板位置后输入12 kV驱动电压。极板间距对电流体泵性能的影响如图5(a)所示。由图可知,流量和压强均随极板间距增大而减小。随着极板间距增大,电场强度变小,流量和压强也随之减小,因此极板间距不宜太大。
图5

图5
针孔电极参数对电流体泵性能的影响
Fig.5
Influence of pinhole electrode parameters on the performance of electrohydrodynamic pump
保持极板间距2 mm不变,电极孔直径从1.0 mm逐渐增加到2.5 mm,同样输入12 kV驱动电压。电极孔直径对电流体泵性能的影响如图5(b)所示。由图可知,随着电极孔直径增大,流量逐渐增加,压强逐渐减小。介电液具有一定的黏度,通过孔极板时液体自身分子间的摩擦作用及电极孔直径都会对介电液产生阻碍作用,因此随着电极孔直径的增大,介电液的流动性增强,流量增大,而压强随着针电极与孔电极之间电场强度的减小而减小。
综合考虑软体执行器驱动能力和响应速度的需求,在保证极板间不发生电压击穿的前提下,极板间距应尽可能小,故取极板间距为1 mm,取电极孔直径为2.0 mm。
多个电流体泵串联对电流体泵输出压强的影响如图6所示。由图可知,电流体泵串联对电流体泵输出压强的影响非常明显。随着电流体泵串联个数的增加,压强增大。电流体泵串联得越多,压强越大,当介电液到达电流体泵最后一级时压强达到最大。由于串联并未改变电流体泵的横切面积,其流量输出值并未随着电流体泵串联个数的增加而呈相应倍数的增大,所以电流体泵串联个数对流量的影响不明显。
图6

图6
多个电流体泵串联对电流体泵输出压强的影响
Fig.6
Influence of multiple electrohydrodynamic pumps in series on the output pressure of electrohydrodynamic pump
多个电流体泵并联对电流体泵输出流量的影响如图7所示。由图可知,随着电流体泵并联个数的增加,输出流量明显增大。这是因为介电液流过电流体泵的横切面积成倍增大,电流体泵流量输出能力得到大幅度提升。由于并联并未增加内部电极对数,因此对输出压强的影响不大。
图7
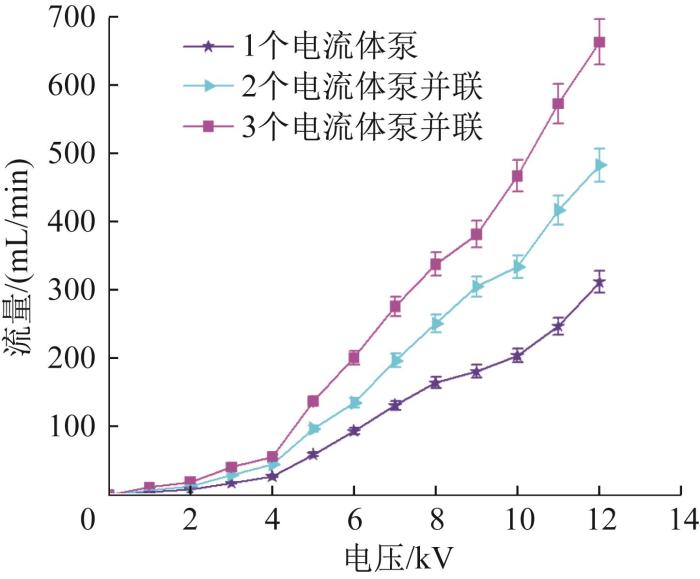
图7
多个电流体泵并联对电流体泵输出流量的影响
Fig.7
Influence of multiple electrohydrodynamic pumps in parallel on the output flow of electrohydrodynamic pumps
笔者设计的电流体泵结构简单,部件高度集成,装配精度高,且工作时很静音。结构相同的电流体泵输出效果差别不大,具有一致性好的优点,因此可以解决目前柔性执行器需要外置刚体泵和阀的问题。电流体泵各部件尺寸如表2所示。
表2 电流体泵各部件尺寸
Table 2
| 参数 | 量值 |
|---|---|
| 外壳尺寸(长×宽×高) | 29 mm×30 mm×18.5 mm |
| 正极板尺寸(长×宽×高) | 26 mm×14.6 mm×1 mm |
| 负极板尺寸(长×宽×高) | 26 mm×14.6 mm×1 mm |
| 极板间距 | 1 mm |
| 电极孔直径 | 2.0 mm |
| 铜针直径 | 0.3 mm |
3 柔性执行器的力学模型
笔者设计的柔性执行器的结构尺寸如图8所示。
图8

为了便于模型分析与计算,在建立柔性执行器力学模型之前进行一定的假设:柔性执行器的每个腔室都为小变形,多个腔室的弯曲角度可以叠加;限制层变形有限,不产生过大的轴向拉伸变形,具有一定的支撑性;多个形状相同的内部腔室受压产生一致且连续的弯曲变形[22]。
柔性执行器的单节腔室主要由限制层、腔室上下半圆实体层和腔室侧面薄壁层组成。采取微元法建立柔性执行器力学模型,并进行力学分析。变形后执行器单节腔室如图9所示。电流体泵泵送的介电液对腔室施加压力后,腔室在限制层的作用下发生以OO′为旋转轴的弯曲。图9(a)中:S1、S2表示腔室还未受压时的空间平面;S11、S22分别表示S1和S2形变移动后的空间平面;曲面V3V22V
图9
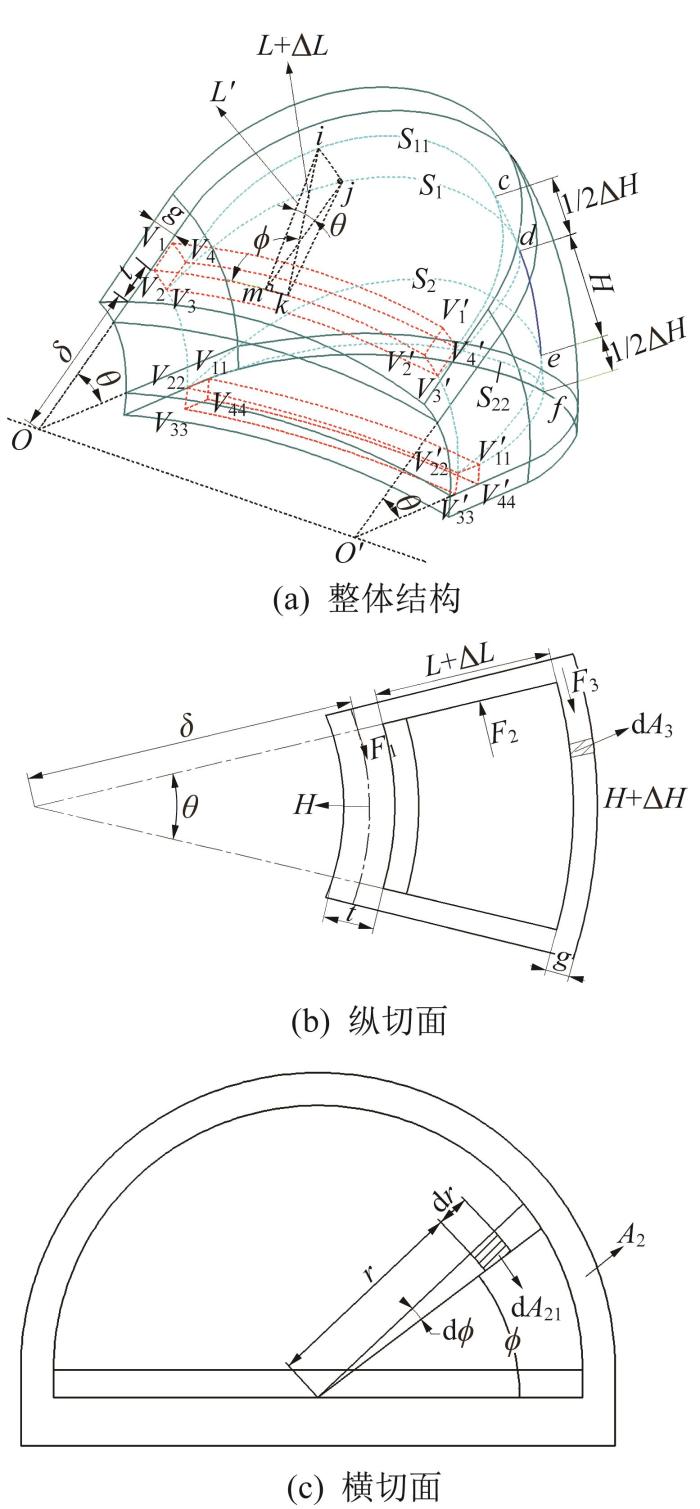
图9
变形后柔性执行器单节腔室示意
Fig.9
Schematic diagram of single section chamber of flexible actuator after deformation
1)单节腔室限制层受力分析。
设由F1、F2、F3产生的力矩分别为M1、M2、M3,根据力矩平衡可得:
对平衡状态下的单节腔室进行研究。根据静力平衡原理可得:
M1可以表示为:
2)单节腔室上端面受力分析。
假设流体均匀作用在腔室内部,采用微元法求解M2。以腔室上端面微元dA21为研究对象,其所受到的力dF21为:
式中:p为介电液对腔室内壁施加的压强。
由图9(c)所示的几何关系可得:
式中:r为积分半圆的半径;
则:
式中:L为单节腔室上端面原长;
介电液对微元施加压力后产生的力矩
式中:L21为dF21的力臂。
因上端面在流体压力作用下会产生一定量的形变,发生一定角度的倾斜,所求力臂L21有一部分是半径r的分量,则可得:
联立
为了简化模型,忽略流道对柔性执行器单节腔室的影响,取其上端面压力产生的力矩为M2。
腔室侧面薄壁层受到介电液压力的作用,导致上端面发生径向拉伸,由胡克定律可得:
式中:Fc为腔室侧壁所受压力;A2为变形后上端面横切面的半圆环面积;E为材料的弹性模量;Sc为腔室侧壁面积。
3)单节腔室侧面薄壁层受力分析。
忽略各腔室的径向形变,且横向变形为小变形,
式中:
则:
式中:
可知:
联立式(
联立式(
令:
则可得:
柔性执行器的弯曲角度可由多个单节腔室弯曲角度叠加,则:
式中:n为柔性执行器腔室个数。
4 柔性执行器弯曲仿真及实验
4.1 柔性执行器弯曲仿真
4.1.1 硅胶材料本构模型
柔性执行器采用的硅胶材料为Ecoflex 00-20系列,其具有良好的拉伸性能。假设硅胶材料在变形中不可压缩,在拉伸实验中可发生各向同性且均匀的大变形。根据应力与应变的关系建立硅胶材料本构模型,其力学性能用应变能密度函数W描述为[23]:
其中:
式中:I1、I2、I3为变形张量不变量,假设硅胶不可压缩,则I3=1;λ1、λ2、λ3为主伸长比。
用来描述硅胶材料应变能函数的模型有多种,本文选用Yeoh本构模型[24],则应变能密度函数的展开多项式为:
式中:i为应变能密度函数的阶数,i=1, 2,…,N;Ci0、di 为材料常数;J为材料变形后的体积比,对于不可压缩的硅胶材料来说,J=1。
Yeoh模型中一般取N=3,则应变能密度函数模型简化为:
通过硅胶材料拉伸实验可得其应力与应变的关系,并通过MATLAB软件拟合可得:C10=0.009 55,C20=-0.001 85,C30=0.000 42。
4.1.2 输出压强对柔性执行器弯曲性能影响的仿真分析
为了分析柔性执行器的弯曲性能,采用Abaqus有限元分析软件进行柔性执行器弯曲仿真。通过Solidworks软件构建柔性执行器模型并导入Abaqus中,选用三阶超弹性Yeoh模型,设置材料系数C10、C20和C30,定义材料属性;在执行器腔室内部表面施加压力并约束执行器端面的6个自由度;采用四面体二次完全积分的杂交实体单元(C3D10H)进行网格划分。柔性执行器弯曲仿真结果如图10所示。
图10
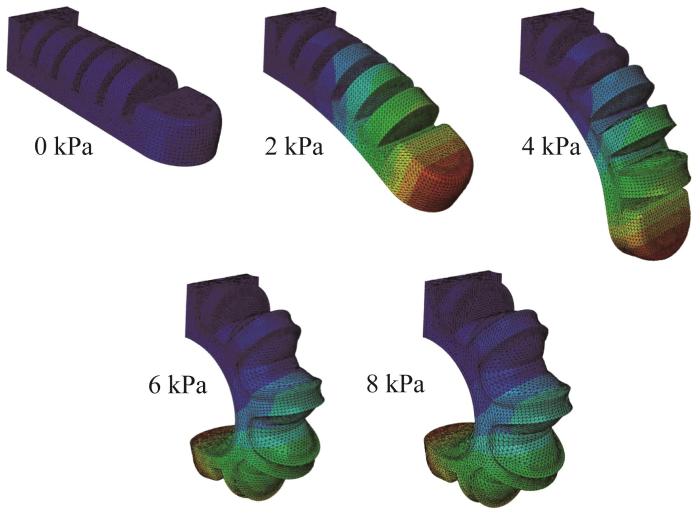
当电流体泵输出压强为6 kPa时,执行器弯曲角度达到84.7°;当输出压强达到7 kPa时,弯曲角度达到95.72°;当输出压强增加到8 kPa时,弯曲角度可达105.3°。
在输出压强逐渐增大到6 kPa的过程中时,执行器快速弯曲至84.7°,响应时间不到1 s,体现了柔性执行器的灵活性及快速响应能力。在压力作用下流道横截面积变大,介电液流量增大而更易进入执行器腔室内部,执行器呈现加速弯曲的趋势;当输出压强大于7 kPa时,执行器发生塑性变形,阻碍介电液进入其腔室内部;当输出压强达到8 kPa时,弯曲角度达到最大并处于平衡状态。将输出压强稳定在最大值,执行器弯曲角度在合理区间且未出现被破坏的迹象,表明所选材料能满足柔性执行器的弯曲要求。
4.2 柔性执行器弯曲实验
4.2.1 柔性弯曲执行器的制备
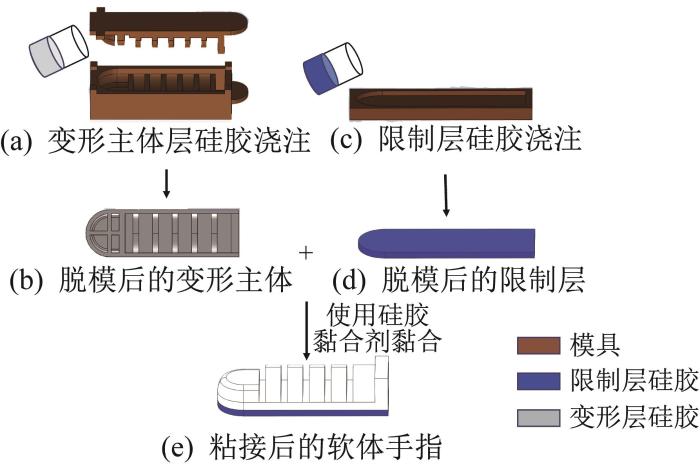
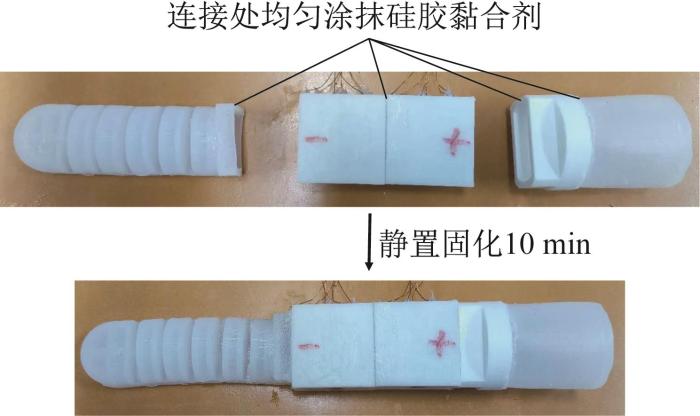
柔性执行器的结构比较复杂,一般采取模具浇注成型的方法制备。通过Solidworks软件绘制出柔性执行器模具的3D结构,采用3D打印技术打印出模具,然后浇铸成柔性执行器。柔性执行器的制备过程如图11所示。其制备过程为:1)各称取15 g Ecoflex 00-20系列的硅胶A、B,混合并用玻璃棒搅拌均匀,放入真空桶内负压真空4 min,排出硅胶中的气泡;2)在变形主体层模具表面均匀喷涂脱模剂以便后续脱模,然后将硅胶材料慢慢倒入模具,并放到50 ℃恒温箱内,4 h后脱模取出得到变形主体;3)将尼龙网剪成与限制层相同的大小和形状,浇入硅胶,固化一段时间后脱模得到限制层;4)将固化后的变形主体层与限制层用硅胶黏合剂黏合,静置固化10 min。对变形主体层与限制层接触区域涂抹硅胶黏合剂时,要均匀涂抹以防粘接不牢而影响柔性执行器的气密性;粘接完成后平放固化,避免重力等因素引起执行器弯曲,保证执行器处于伸直状态。
图11
柔性弯曲执行器的装配过程如图12所示。电流体泵的针电极端与孔电极端配合,在其接触端面均匀涂抹硅胶黏合剂,然后用力按压使两端接合,平放静置固化10 min;用相同的方法依次在电流体泵孔极板裸露端黏合柔性执行器,针极板裸露端黏合储液缸,待硅胶黏合剂固化后用注射器将介电液注入柔性弯曲执行器腔室,使介电液充满执行器腔室内部空间,排空腔室内部空气后进行实验。
图12
4.2.2 输出压强对柔性执行器弯曲性能影响的实验验证
采用2个电流体泵串联的方式驱动软体执行器。当电流体泵的输出压强为0,2,4,6,8 kPa时柔性执行器的弯曲状态如图13所示。
图13
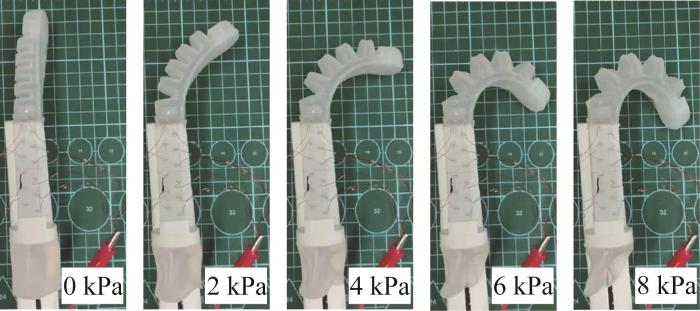
电流体泵输出压强与柔性执行器弯曲角度的关系曲线如图14所示。由图可知,弯曲角度的实验值与理论值、仿真值存在一定误差,主要原因是:理论和仿真分析时忽略了柔性执行器和介电液重力的影响;在柔性执行器硅胶浇注过程中存在人为误差导致硅胶组分分布不均。但误差较小,在合理范围内,实验结果验证了仿真模型的准确性。此外,柔性执行器从0°弯曲到95.7°用了不到2 s的时间,表明执行器具有快速响应能力,也说明了所设计的电流体泵的实用性。通过实验可知,当电流体泵的驱动压强为8 kPa时,柔性执行器的弯曲角度可达95.7°,实现了大角度弯曲,具有与人手指一样灵活弯曲的能力。
图14

图14
电流体泵输出压强与柔性执行器弯曲角度的关系曲线
Fig.14
Relationship curve between the output pressure of electrohydrodynamic pump and the bending angle of flexible actuator
5 结 论
1)基于EHD原理,设计了由电流体泵、柔性执行器和储液缸等组成的柔性弯曲执行器,实现了其大角度弯曲的功能。
2)设计了一款由针孔电极配对产生射流的电流体泵,通过实验研究了电流体泵极板间距、电极孔直径对电流体泵输出流量和压强的影响,确定了电流体泵各部件尺寸。实验验证了电流体泵作为驱动源,可以满足灵活驱动柔性执行器的要求。
3)根据柔性执行器材料性质,建立了驱动压强与柔性执行器弯曲角度关系的力学模型,对驱动压强与柔性执行器弯曲角度关系进行了理论分析和Abaqus仿真,为实验提供了较为准确的理论参考。
4)通过实验验证了柔性执行器优秀的弯曲性能。弯曲角度的实验值与理论值、仿真值较一致,验证了仿真模型的准确性。
5)电流体泵的串联使得电流体泵的驱动能力得到显著提高,取得了良好的驱动效果,解决了目前柔性执行器需要外置刚体泵和阀的问题。
参考文献
Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot
[J].
Hierarchical control of soft manipulators towards unstructured interactions
[J].
A resilient, untethered soft robot
[J].
软体机器人驱动、建模与应用研究综述
[J].
Review of driving methods, modeling and application in soft robots
[J].DOI:10.14132/j.cnki.1673-5439.2019.03.010 [本文引用: 1]
气动软体采摘机械手设计及实验研究
[J].
Design and experimental research of pneumatic soft picking manipulator
[J].DOI:10.3785/j.issn.1006-754X.2022.00.085
软体机器人气压驱动结构研究综述
[J].
Review on pneumatic-driven structure for soft robot
[J].DOI:10.3772/j.issn.1002-0470.2019.05.008 [本文引用: 1]
Design, fabrication and control of soft robots
[J].
Exo-glove poly Ⅱ: A polymer-based soft wearable robot for the hand with a tendon-driven actuation system
[J].
Fluidic origami: A plant-inspired adaptive structure with shape morphing and stiffness tuning
[J].
Rubber muscle actuation with pressurized CO2 from enzyme-catalyzed urea hydrolysis
[J].
Multimaterials 3D printing for free assembly manufacturing of magnetic driving soft actuator
[J].
Shape memory nanocomposite fibers for untethered high-energy microengines
[J].
Design of a variable-stiffness robotic hand using pneumatic soft rubber actuators
[J].
Octopus arm-inspired tapered soft actuators with suckers for improved grasping
.[J].
Proprioception and exteroception of a soft robotic finger using neuromorphic vision-based sensing
[J].
Novel design and three-dimensional printing of variable stiffness robotic grippers
[J].
Development of an EHD micropump to generate oscillating flow at low frequencies (effect of waveform on the EHD pumping)
[J].
Stretchable pumps for soft machines
[J].
Fiber pumps for wearable fluidic systems
[J].
Customizing a self-healing soft pump for robot
[J].
针-环与针-网电极液体EHD泵静态驱动力的实验研究
[J].
Experimental study on the static thrust of liquid EHD pump with single needle-ring and needle-mesh electrodes
[J].DOI:10.13336/j.1003-6520.hve.2015.06.046 [本文引用: 1]
A variable structure pneumatic soft robot
[J].
常用硅胶材料软体气动夹爪夹持性能的仿真研究
[J].
The simulation of the clamping performance of soft pneumatic grippers made of common silicone materials
[J].DOI:10.3969/j.issn.1673-3851(n). 2021.03.006 [本文引用: 1]
A comparative study of several material models for prediction of hyperelastic properties: Application to silicone‐rubber and soft tissues
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}