|
|
|
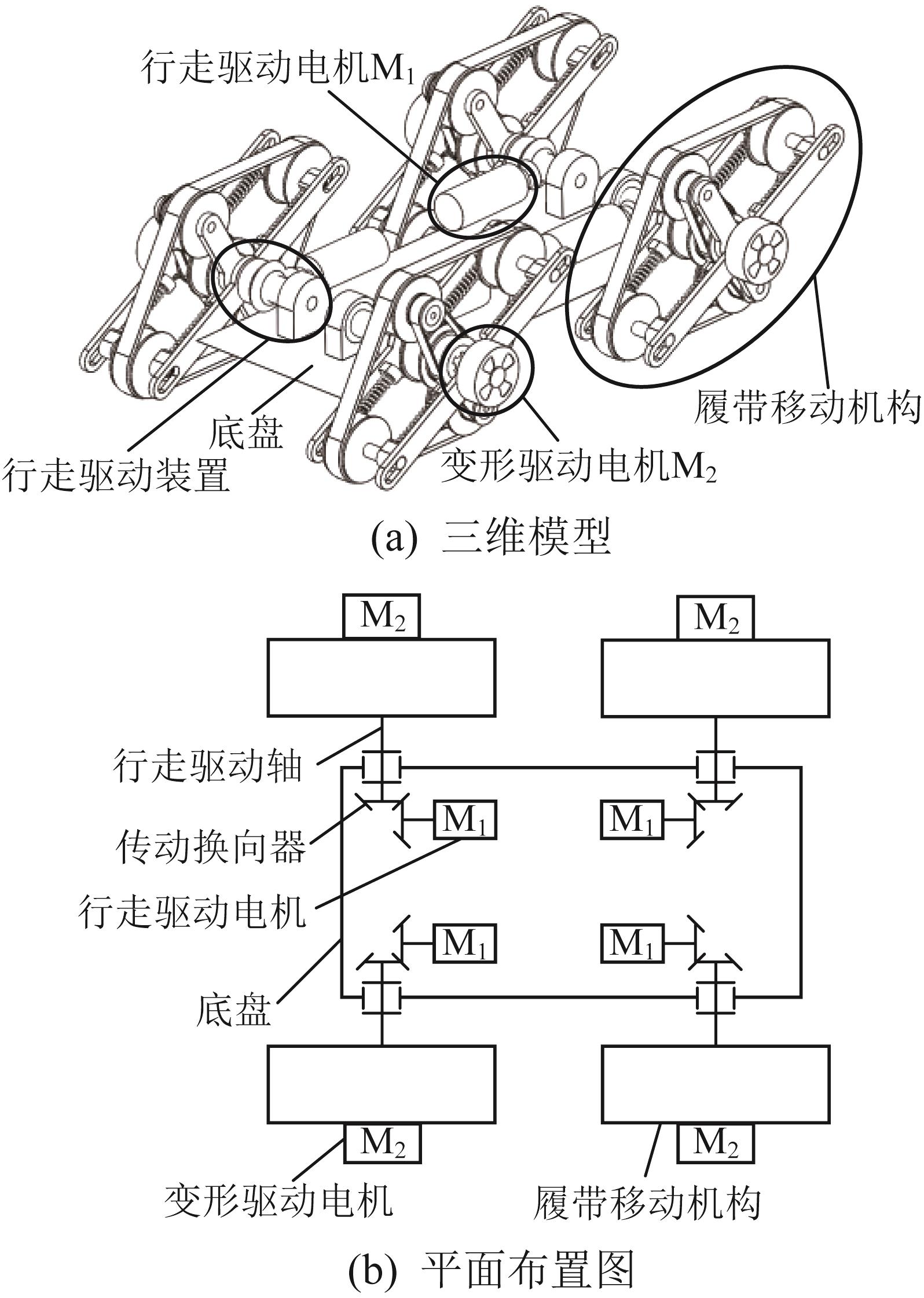
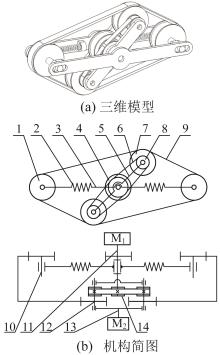
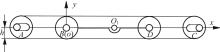
Fig.1 Planetary tracked vehicle model
|
|
|
|
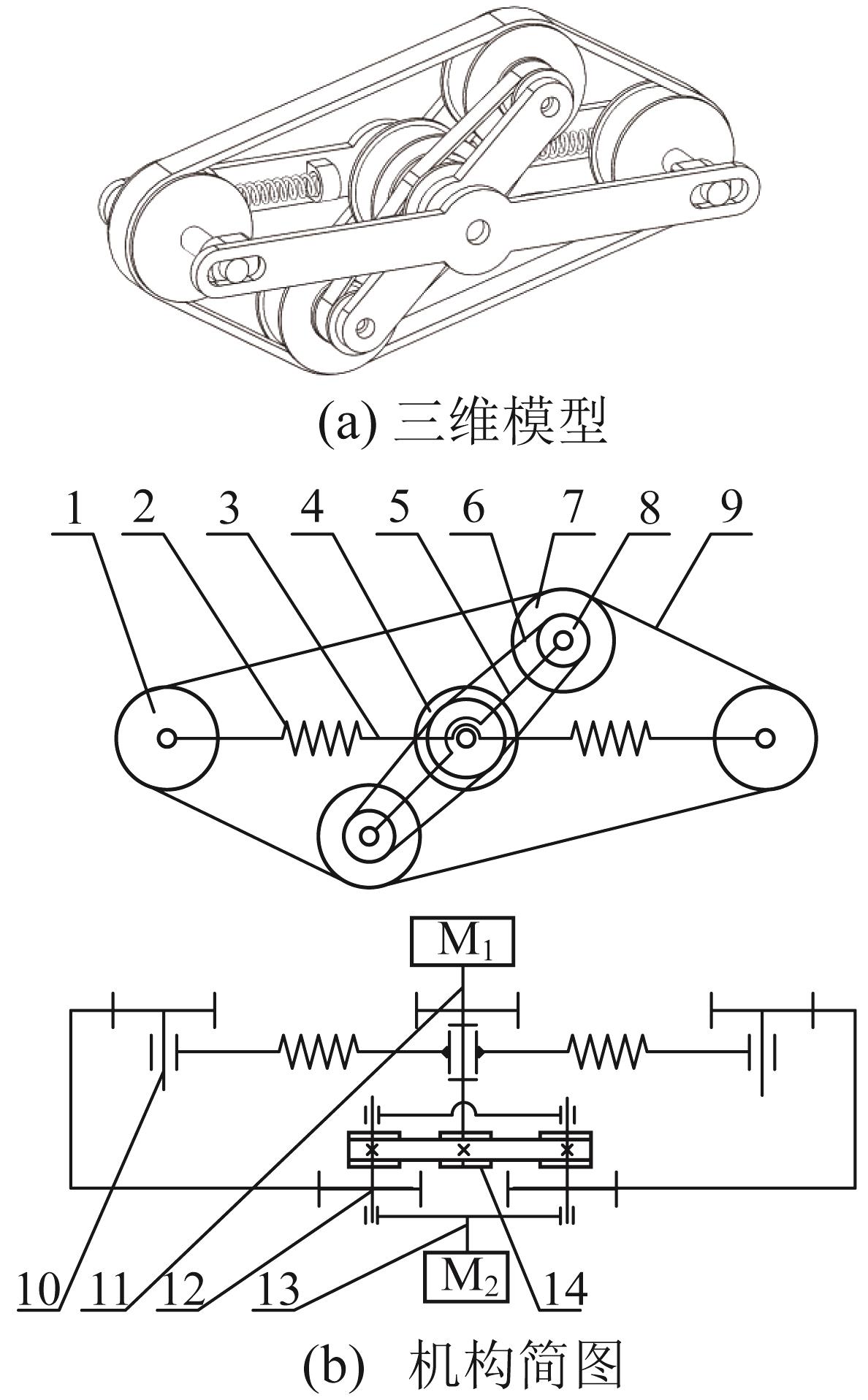
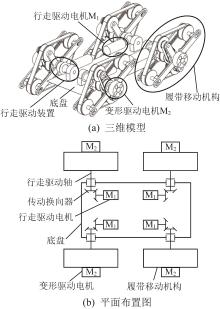
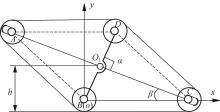
Fig.2 Configuration of planetary underactuated transformable tracked mobile mechanism
|
|
|
|
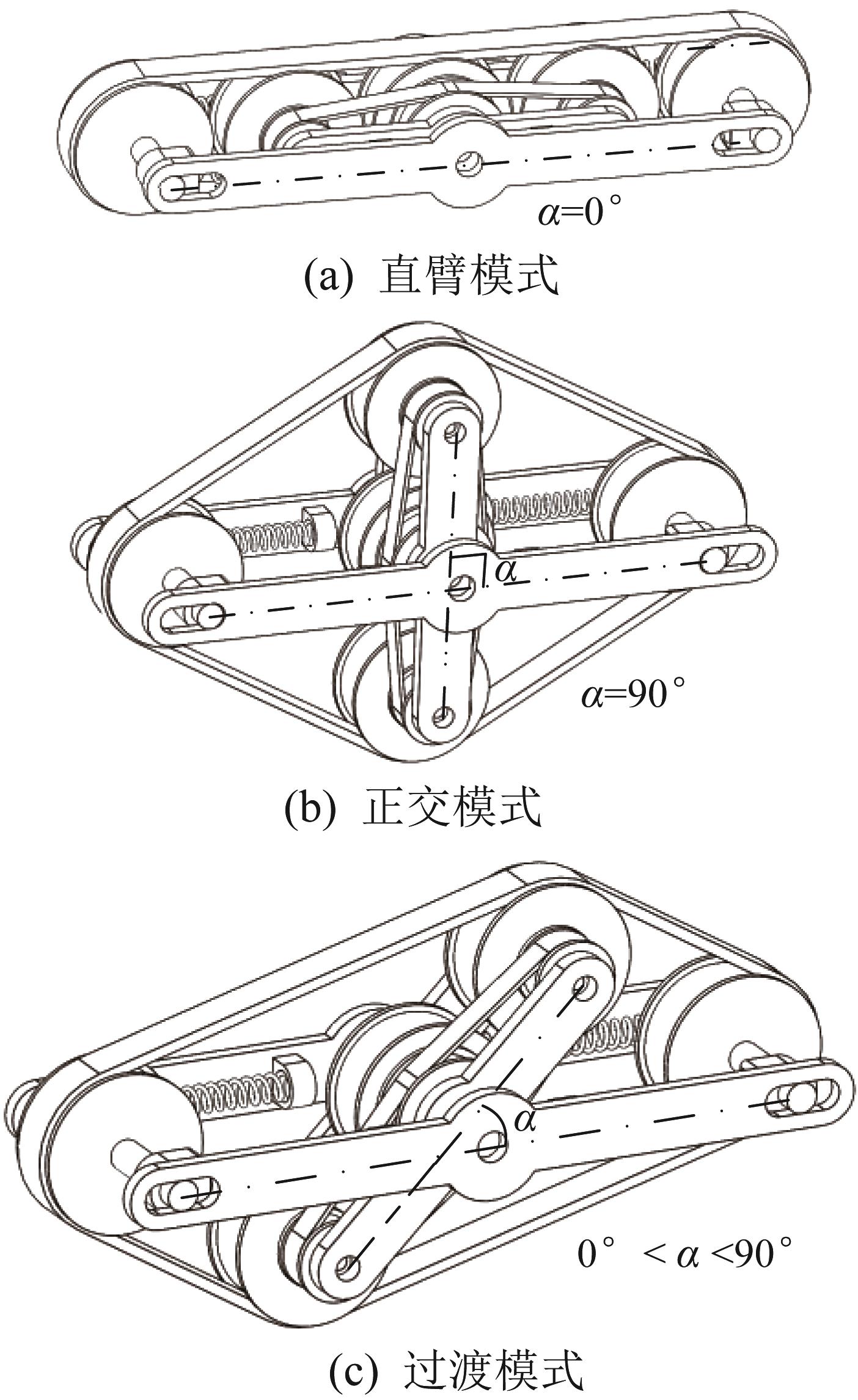
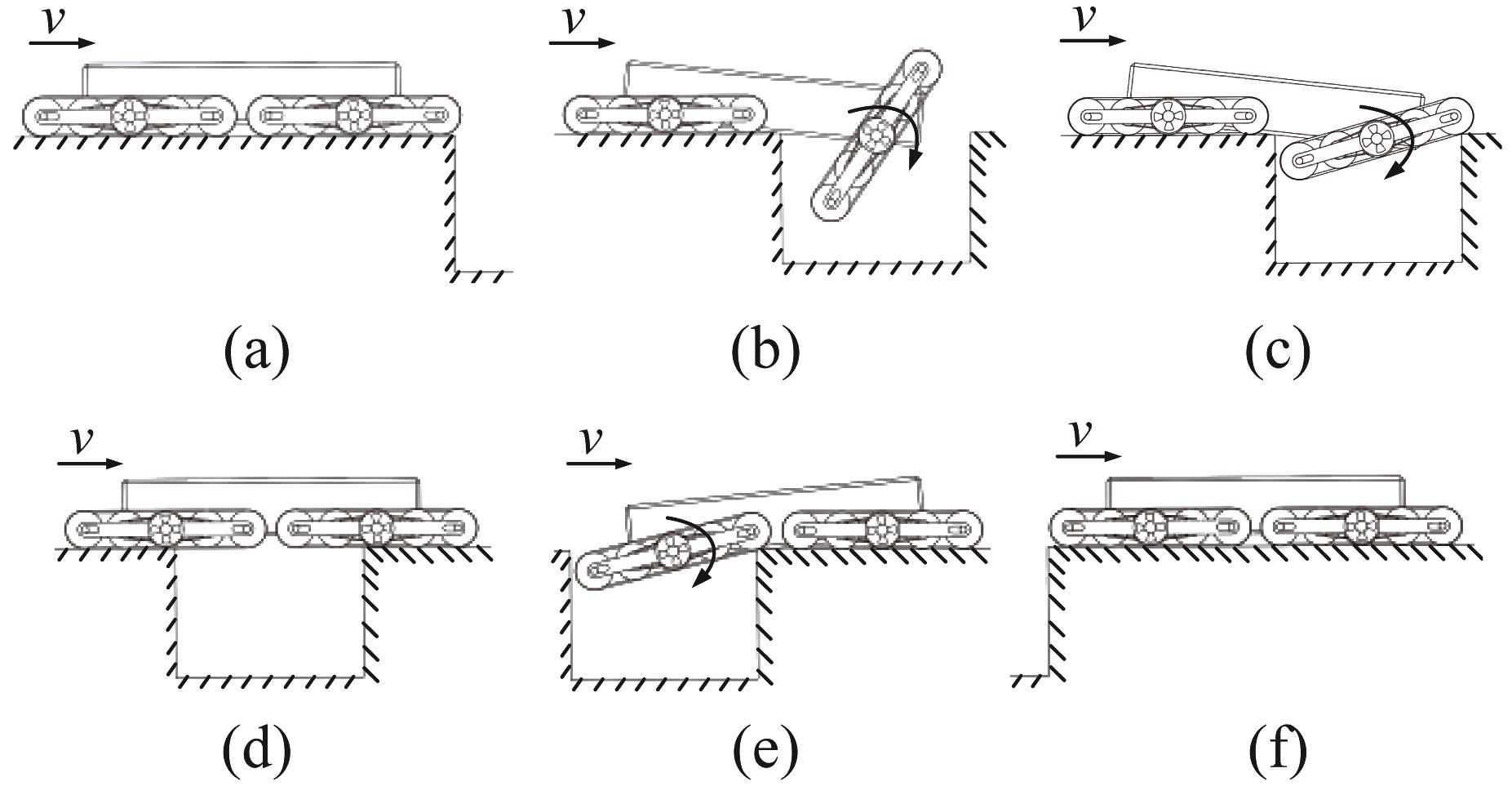
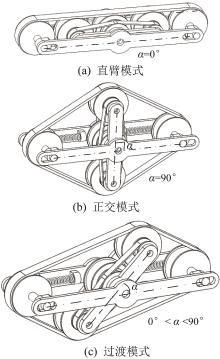
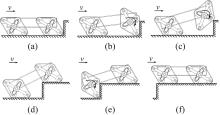
Fig.3 Schematic diagram of motion modes of tracked mobile mechanism
|
|
|
|
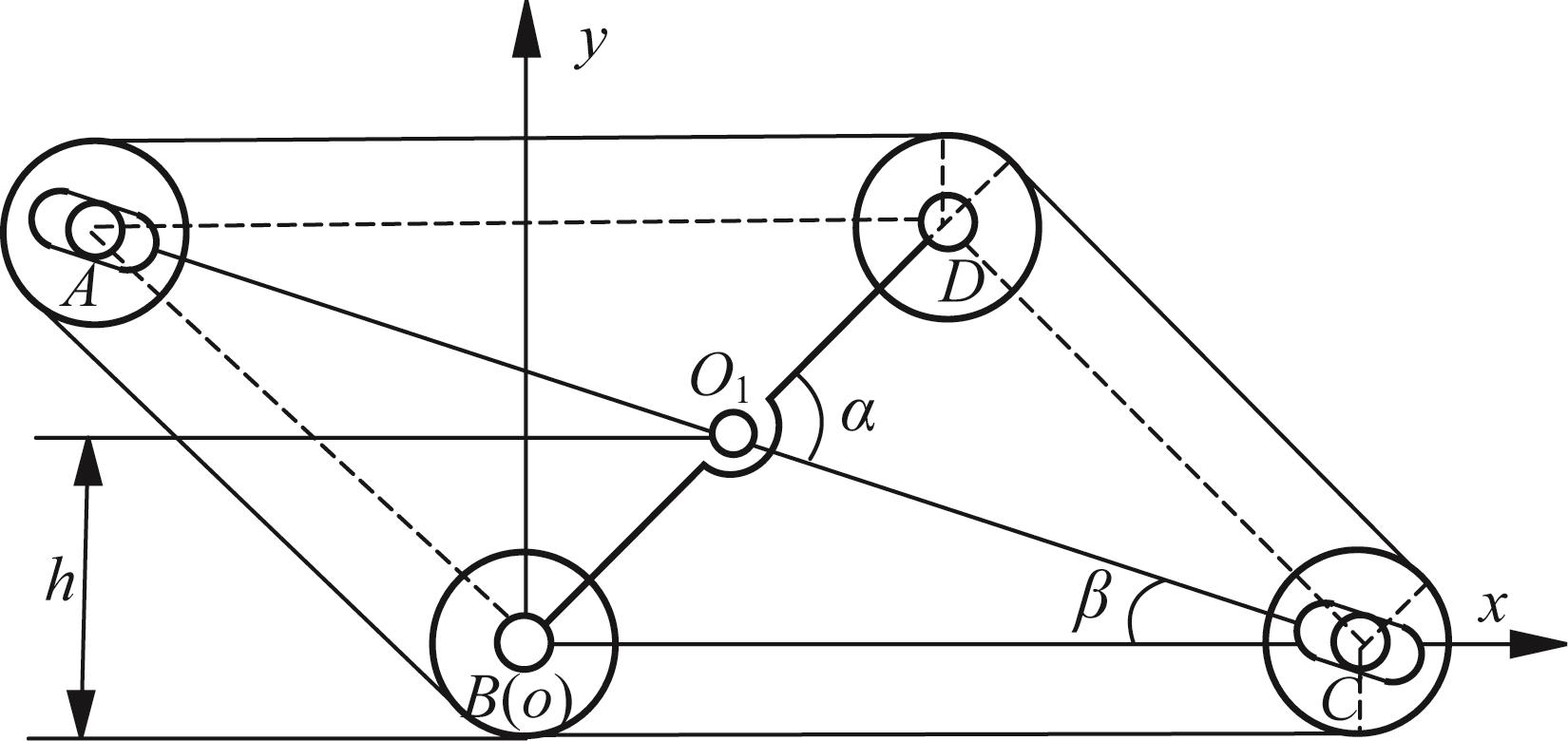
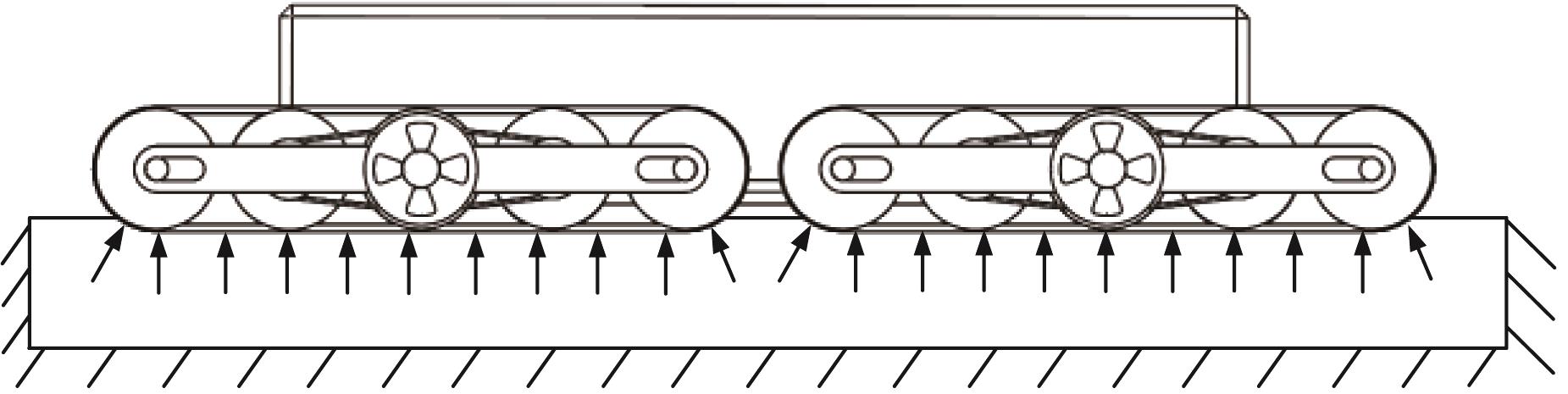
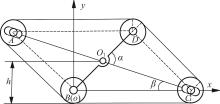
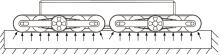
Fig.4 Structural diagram of transition mode tracked mobile mechanism
|
|
| 参数名称 | 参数符号 | 算例值 |
|---|
| 行星杆转角/(°) | α | 0~90 | | 行星杆长度/mm | lBD | 112 | | 履带轮直径/mm | d | 47.75 | | 履带周长/mm | l | 600 | | 履带宽度/mm | w | 80 | | 履带AB段长度/mm | lAB | 与α相关 | | 履带BC段长度/mm | lBC | 与α相关 | | 从动轮间距/mm | lAC | 与α相关 | | 连线BC与AC的夹角/(°) | β | 0~30 |
|
|
Table 1 Dimensional parameters and example values of tracked mobile mechanism
|
|
|
|
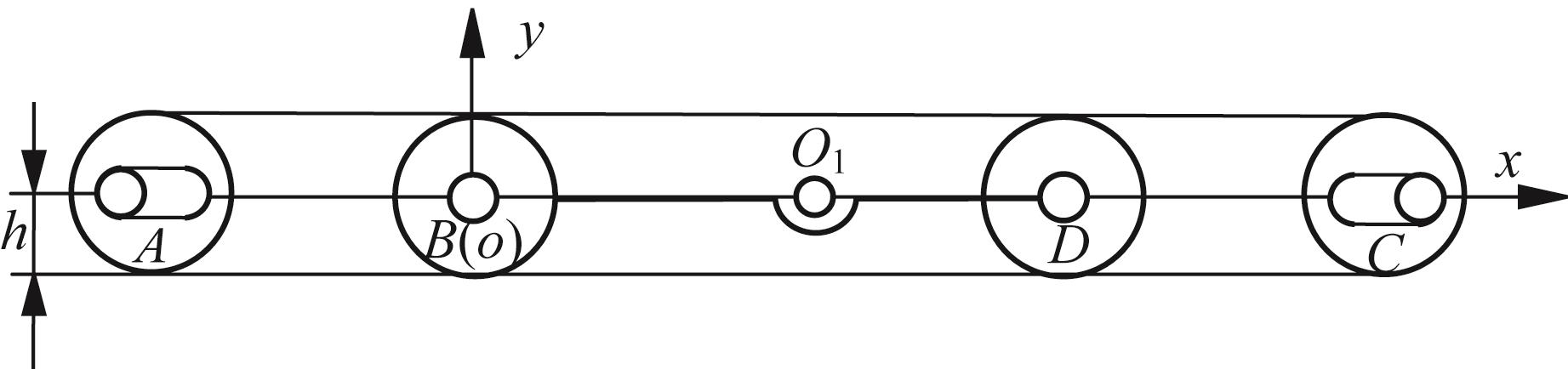
Fig.5 Structural diagram of straight-arm mode tracked mobile mechanism
|
|
|
|
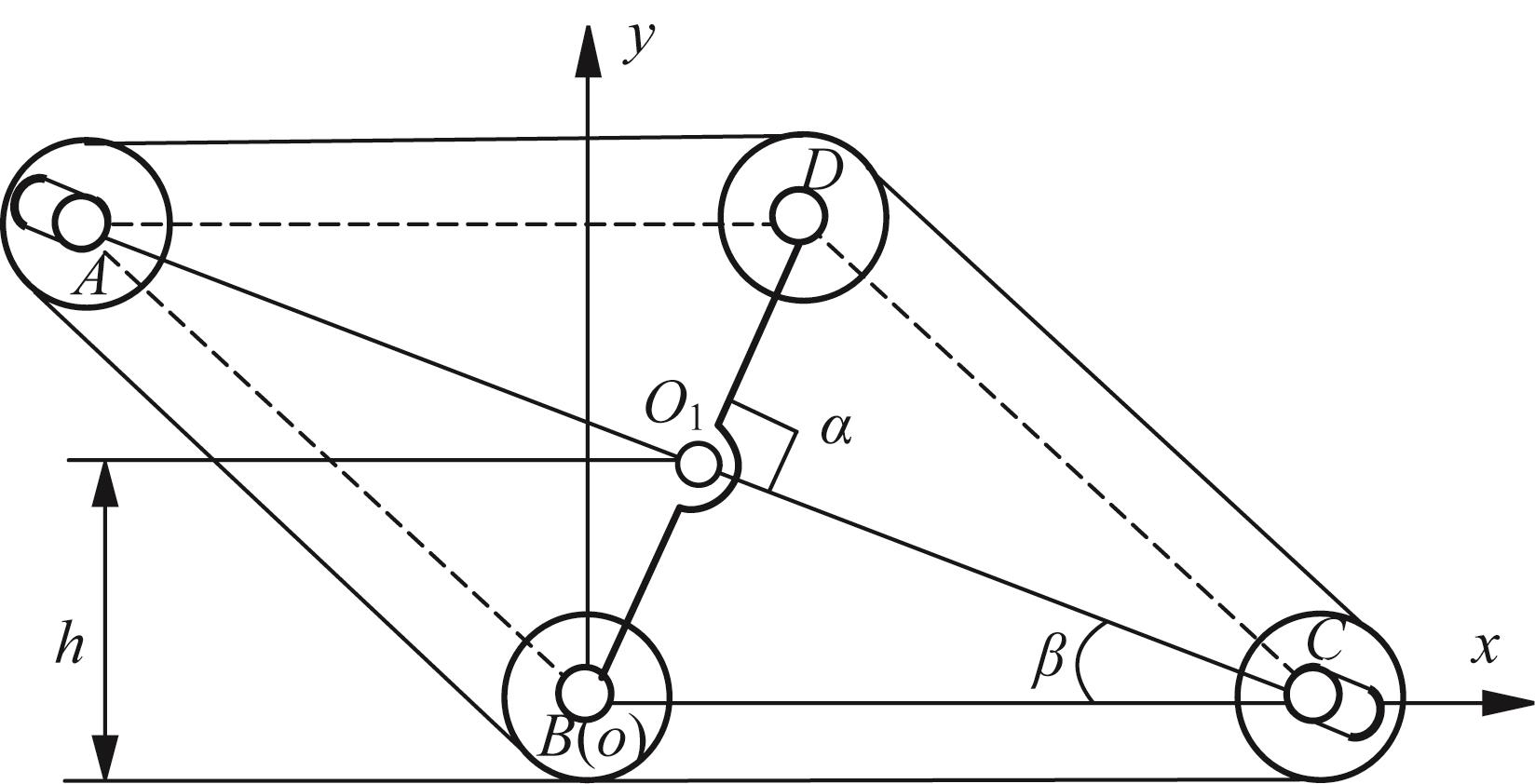
Fig.6 Structural diagram of orthogonal mode tracked mobile mechanism
|
|
|
|
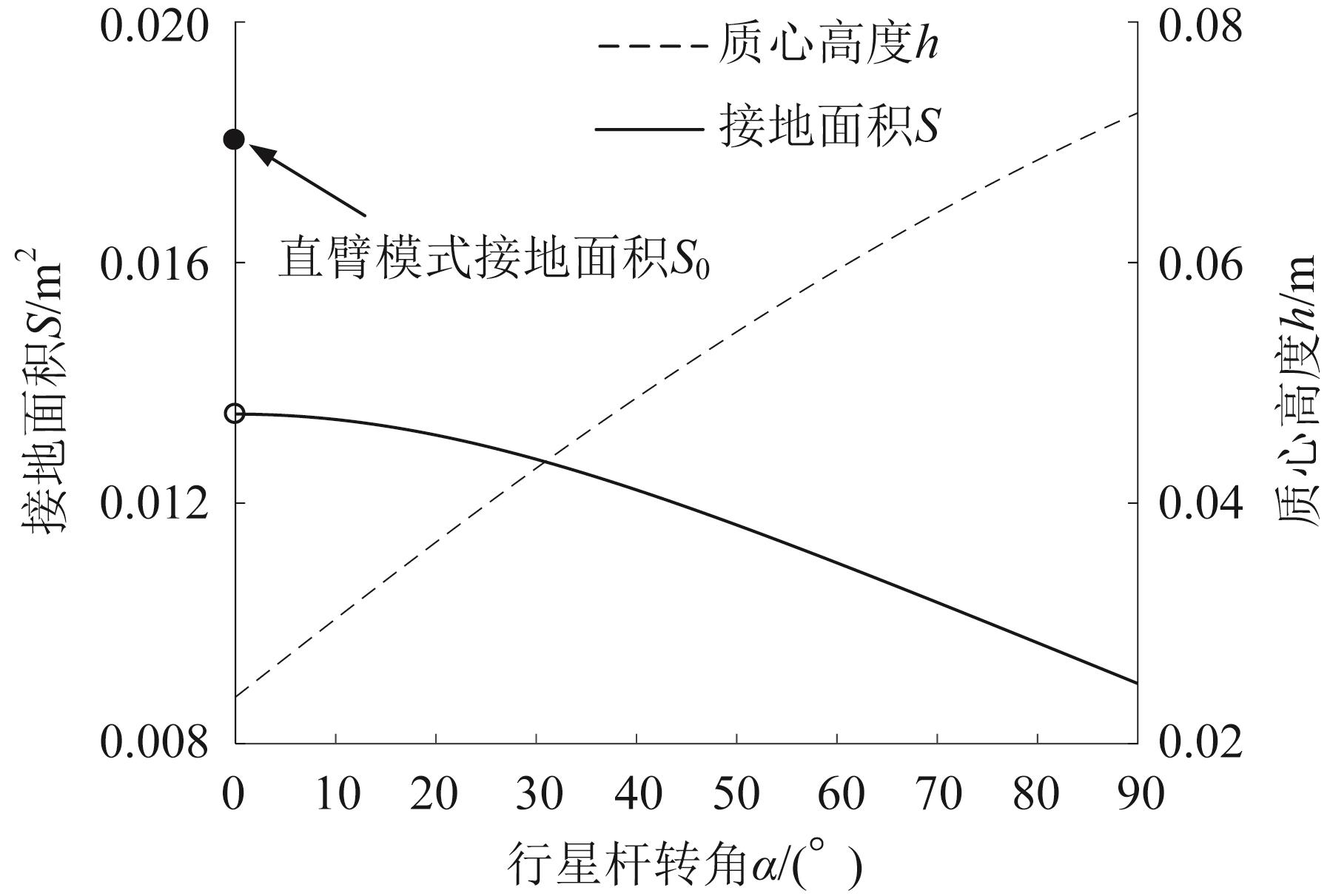
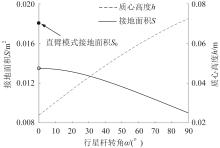
Fig.7 Relationship between center-of-mass height and ground contact area and planetary rod rotation angle for tracked mobile mechanism
|
|
|
|
Fig.8 Force diagram of straight-arm mode tracked mobile mechanism
|
|

|
|
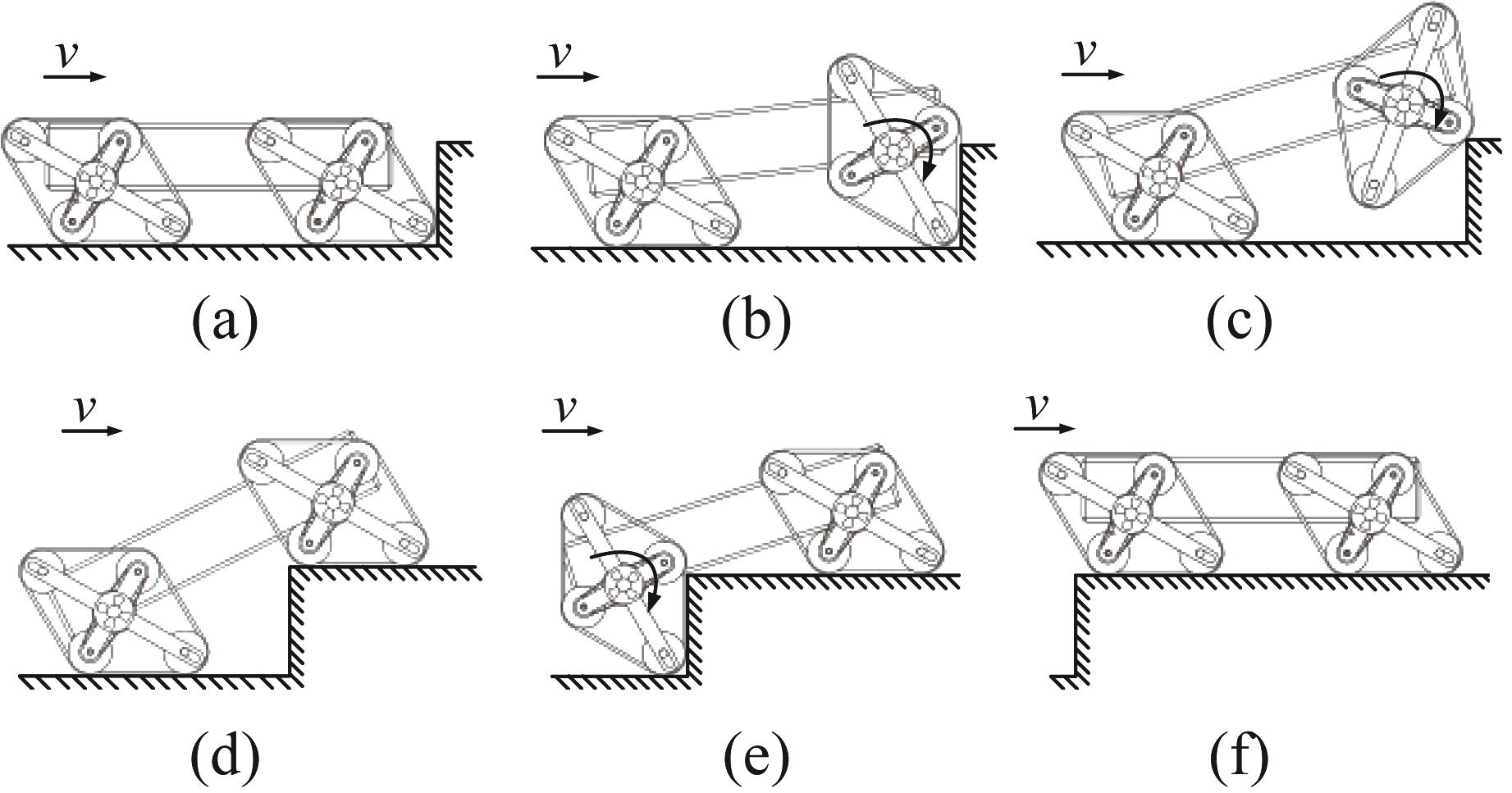
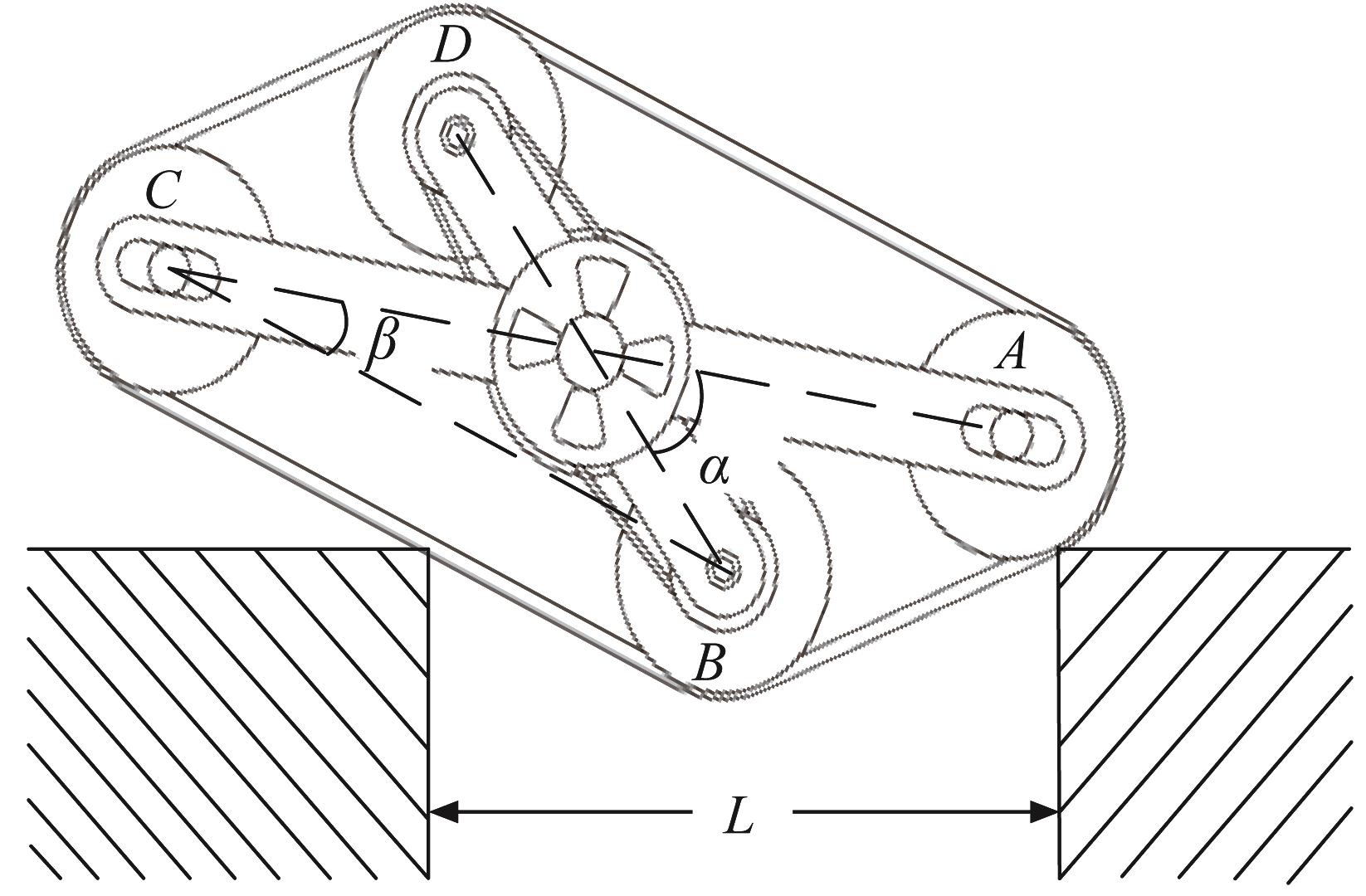
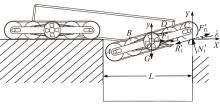
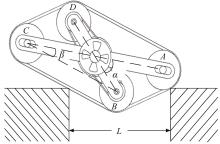
Fig.9 Schematic of trench crossing process of straight-arm mode tracked mobile mechanism
|
|
|
|
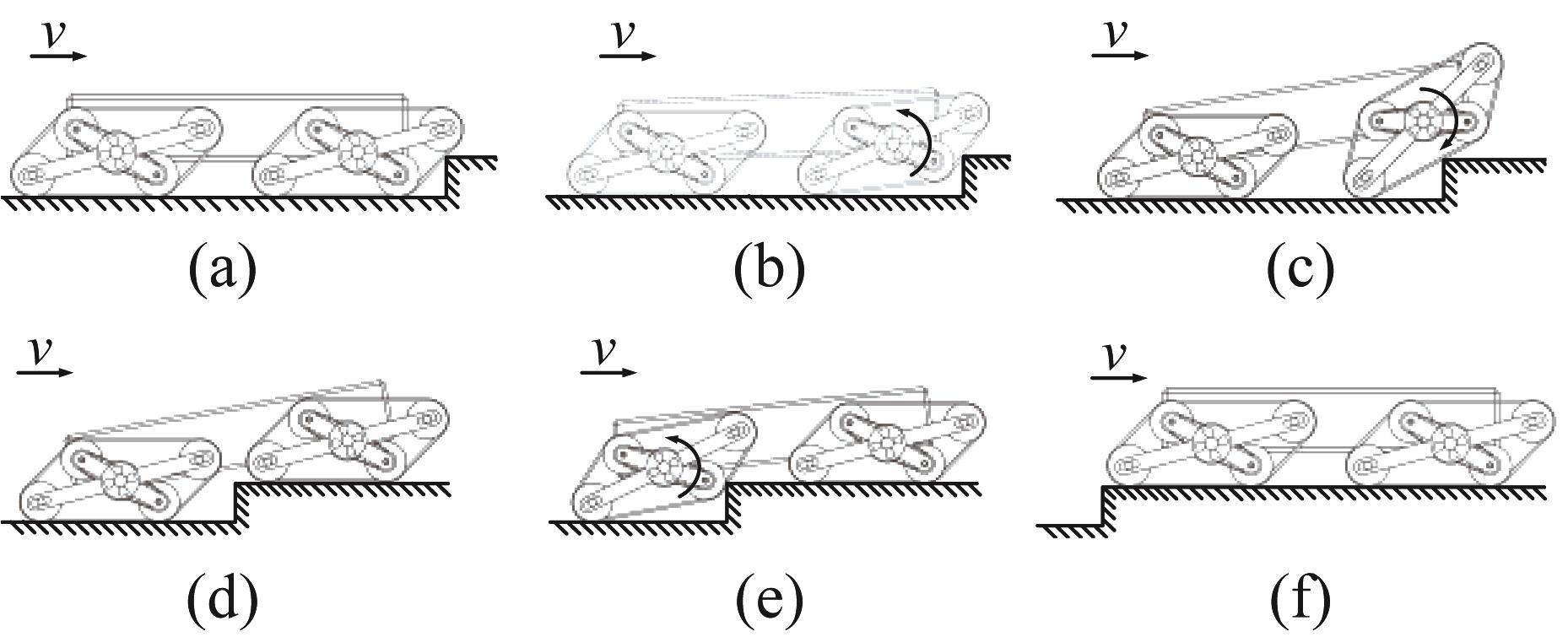
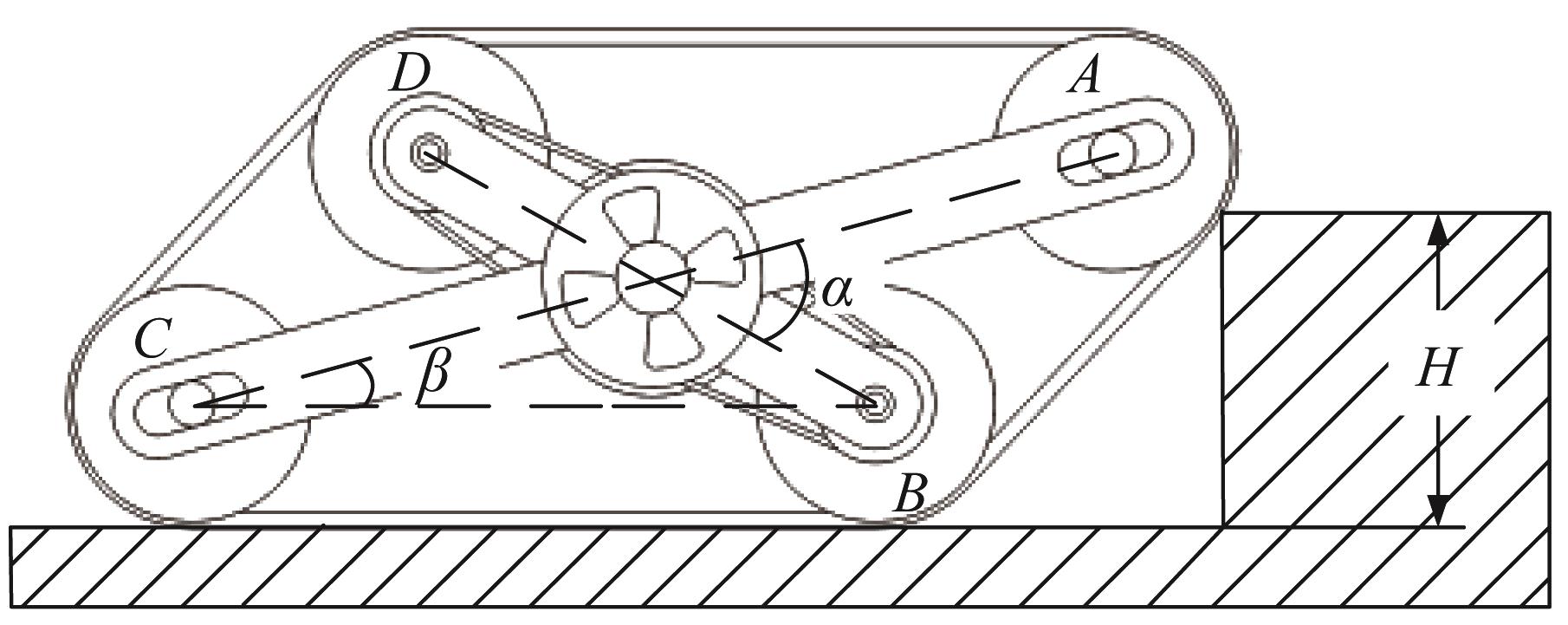
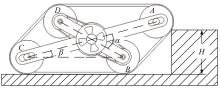
Fig.10 Schematic of protrusion surmounting process of orthogonal mode tracked mobile mechanism
|
|

|
|
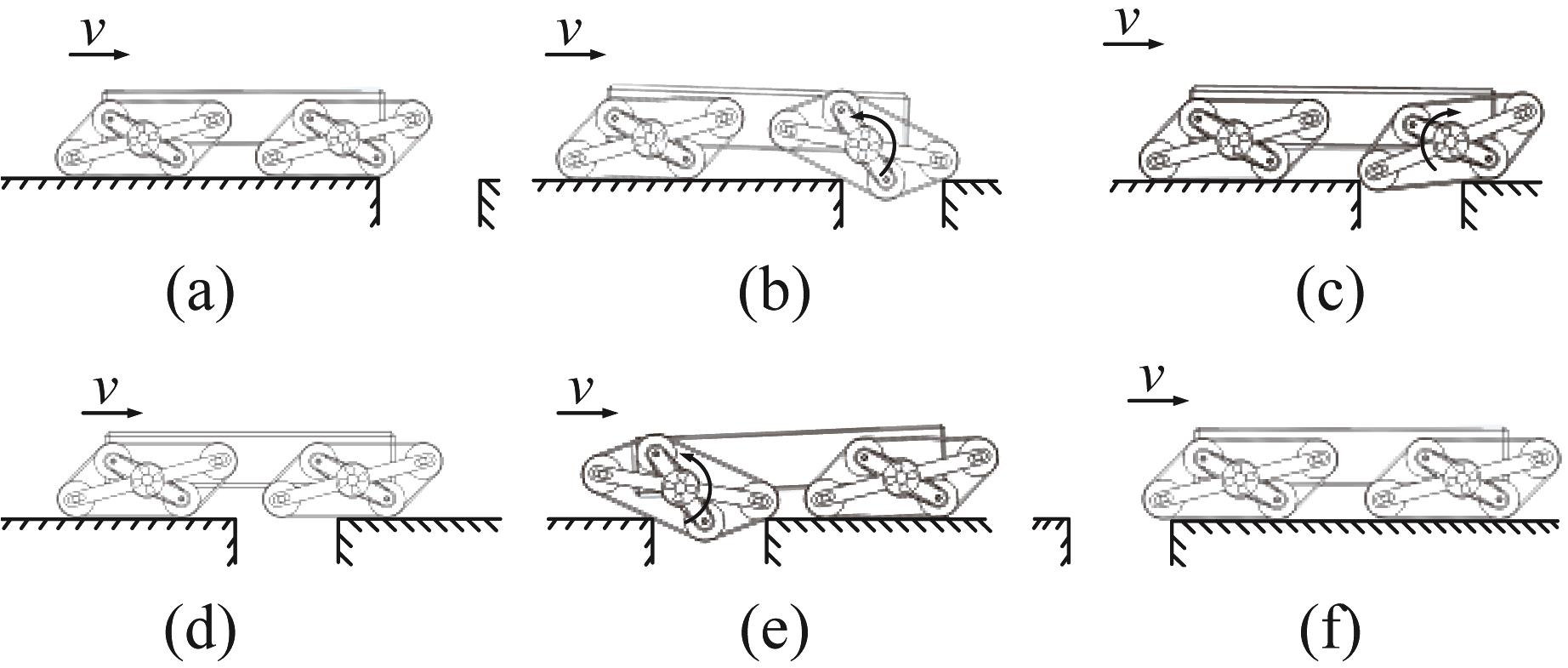
Fig.11 Schematic of trench crossing process of transition mode tracked mobile mechanism
|
|

|
|
Fig.12 Schematic of protrusion surmounting process of transition mode tracked mobile mechanism
|
|
| 参数名称 | 参数符号 | 算例值 |
|---|
| 电机输出扭矩/(N·m) | M | | | 履带移动机构翻转扭矩/(N·m) | M' | | | 单个履带移动机构承受的重力/N | G | 75 | | 车体前后轴距/mm | l1 | 292 | | 凸台高度/mm | H | | | 沟槽宽度/mm | L | | | 行星轮传动比 | i | 0.636 | | 车体对履带移动机构的推力/N | Fj (j=1, 2, 3) | | | 履带与地面和障碍物的摩擦系数 | μ1、μ2 | 0.7 | | 行星轮B处履带受地面的支持力/N | Nj | | | 从动轮C处履带受地面的支持力/N | Nj ′ | | | 履带受障碍物的支持力/N | Nj ″ | | | 行星轮D处履带受障碍物的支持力/N | Nj ′″ | | | 履带受地面的摩擦力/N | Rj ′ | | | 履带受障碍物的摩擦力/N | Rj ″、Rj ′″ | | | 履带对地面的牵引力/N | Ff j ′ | | | 履带对障碍物的牵引力/N | Ffj ″、Ffj ′″ | | | 履带模块的转动惯量/(kg·m2) | J | | | 侧板夹角(侧板与地面夹角)/(°) | | | | 行星杆夹角(行星杆与水平面夹角)/(°) | λ′ | | | Nj ′与水平面夹角/(°) | φ | | | Nj ′″与水平面夹角/(°) | τ | |
|
|
Table 2 Kinematic parameters and example values of tracked mobile mechanism
|
|
|
|
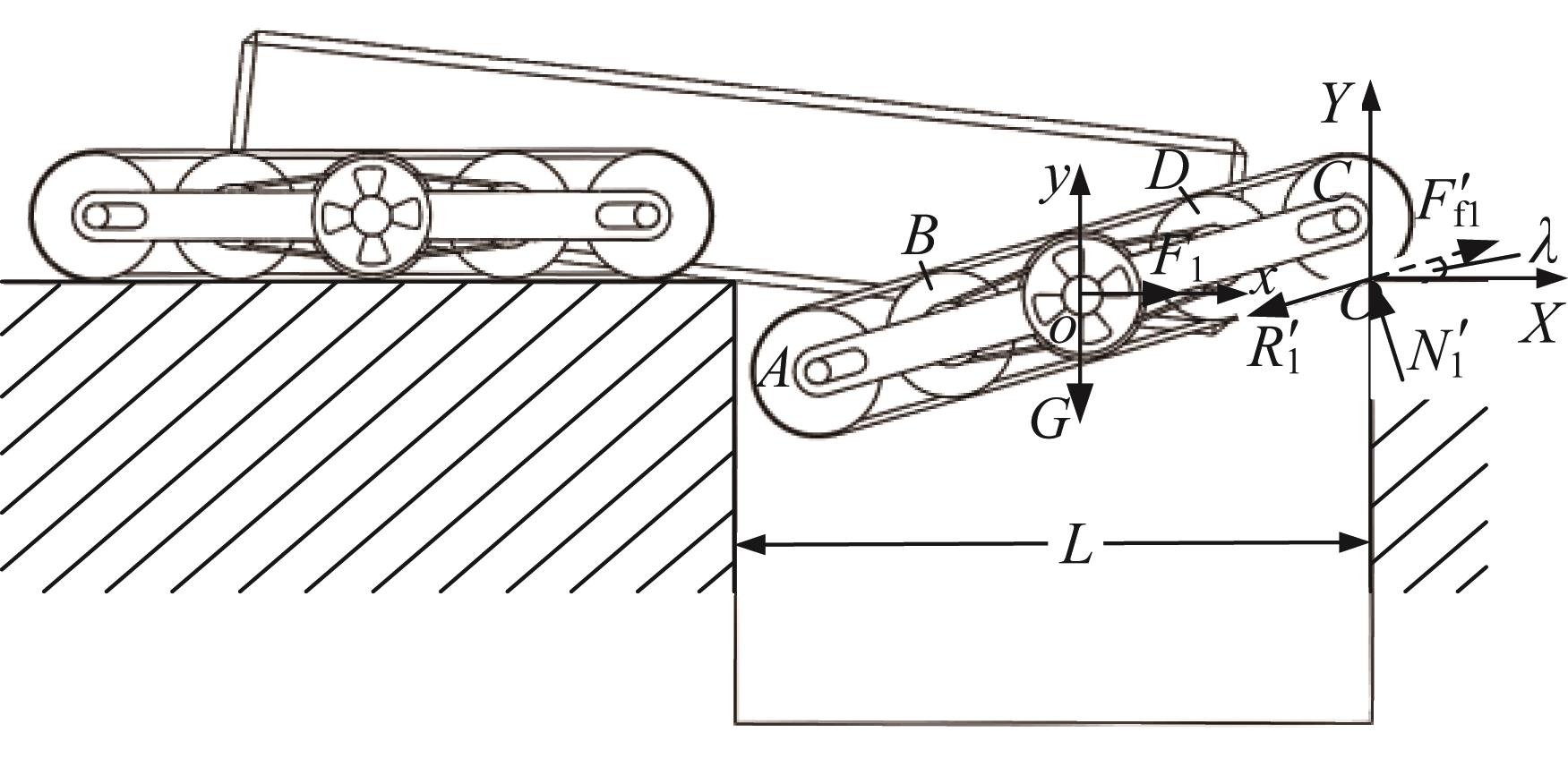
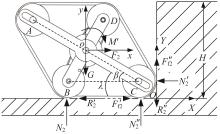
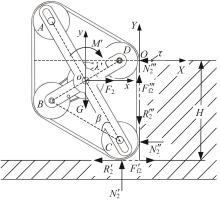
Fig.13 Force analysis of straight-arm mode tracked mobile mechanism during crossing trench
|
|
|
|
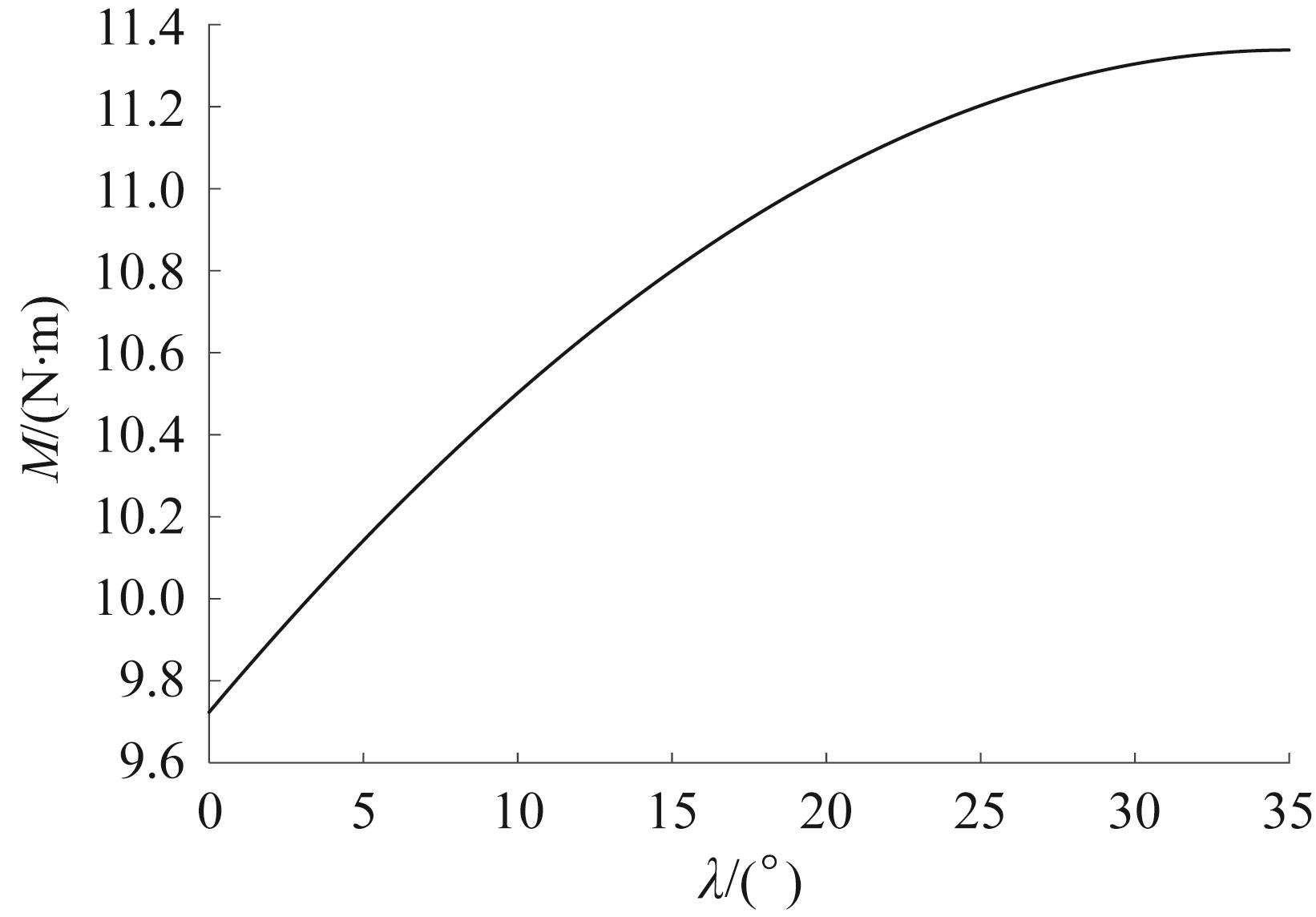
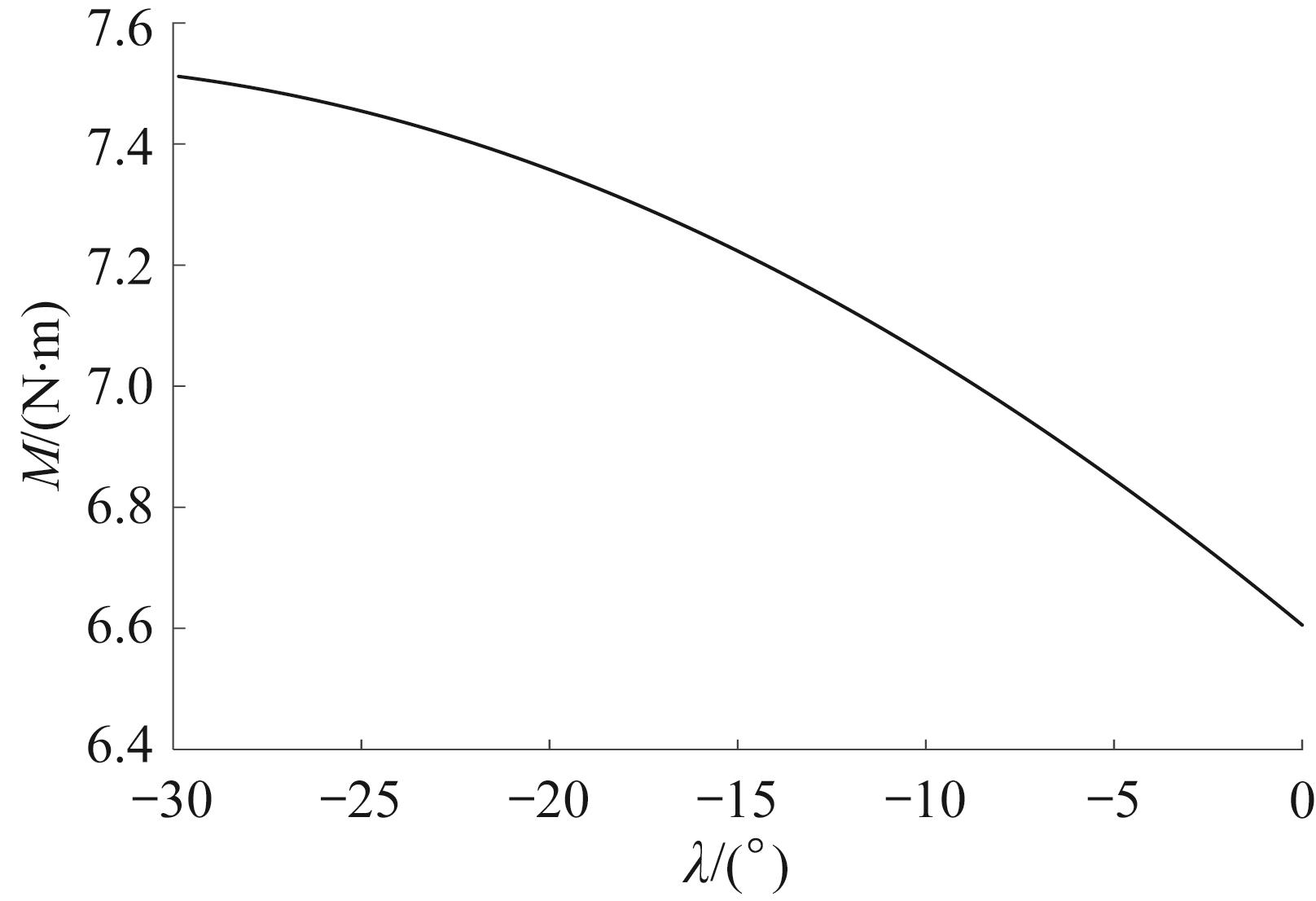
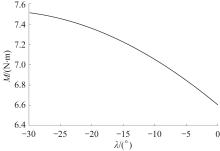
Fig.14 Relationship between required driving torque and side blate angle of straight-arm mode tracked mobile mechanism during crossing trench
|
|
|
|
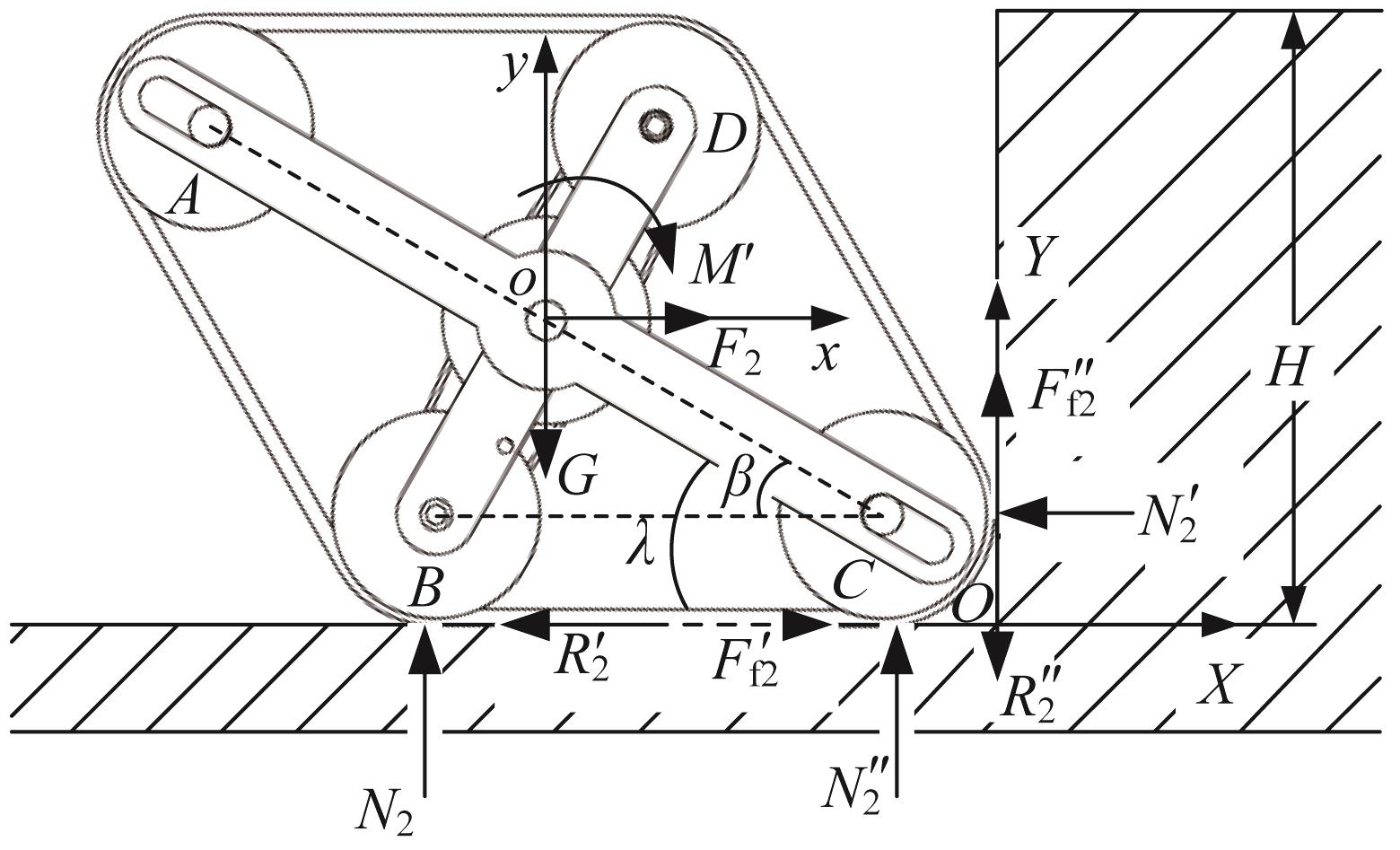
Fig.15 Force analysis of orthogonal mode tracked mobile mechanism during the first stage of surmounting protrusion
|
|

|
|
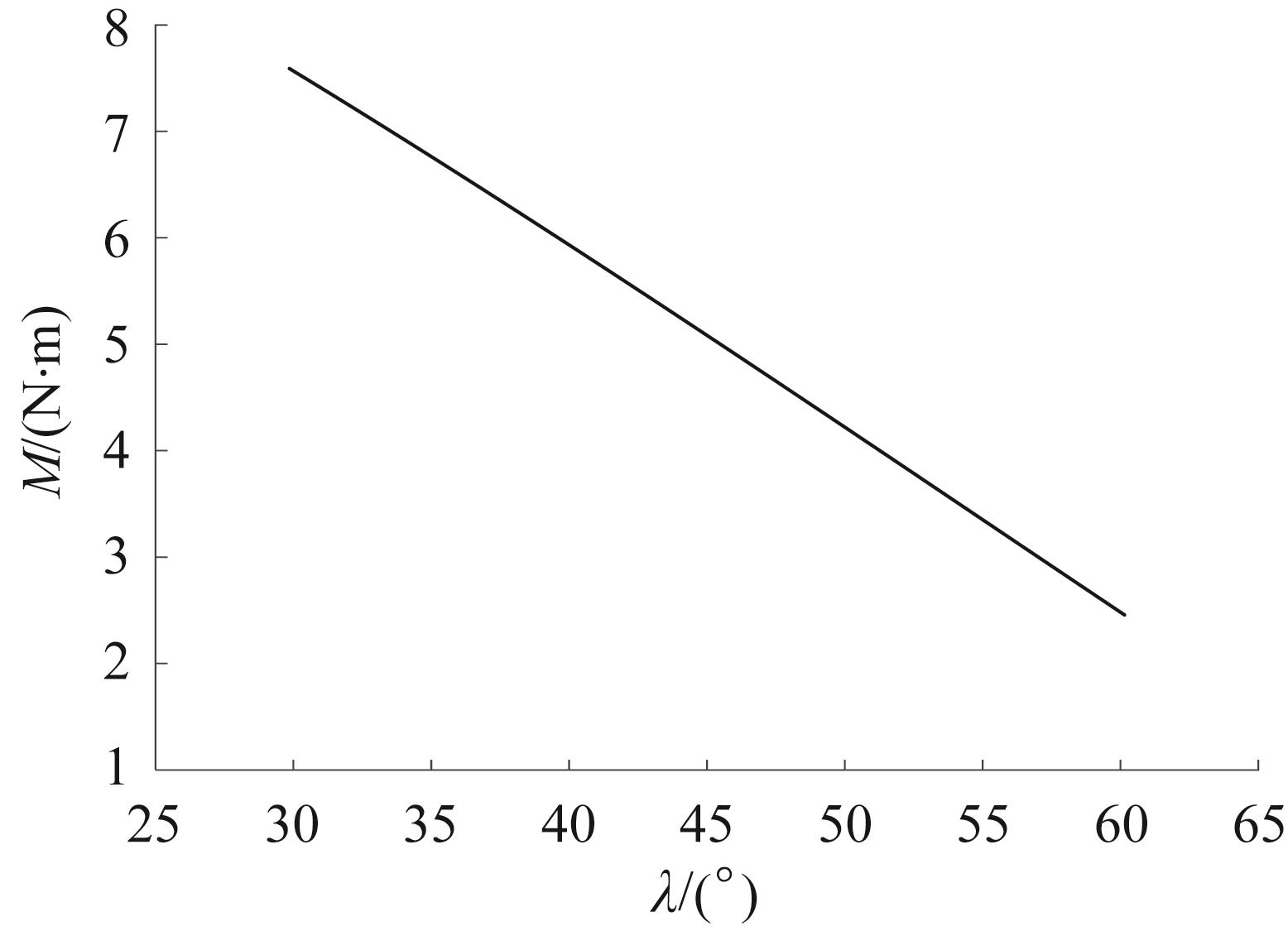
Fig.16 Relationship between required driving torque and side blate angle of orthogonal mode tracked mobile mechanism during the first stage of surmounting protrusion
|
|
|
|
Fig.17 Force analysis of orthogonal mode tracked mobile mechanism during the second stage of surmounting protrusion
|
|
|
|
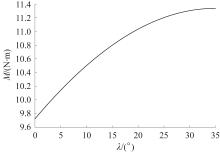
Fig.18 Relationship between required driving torque and planetary rod angle of orthogonal mode tracked mobile mechanism during the second stage of surmounting protrusion
|
|
|
|
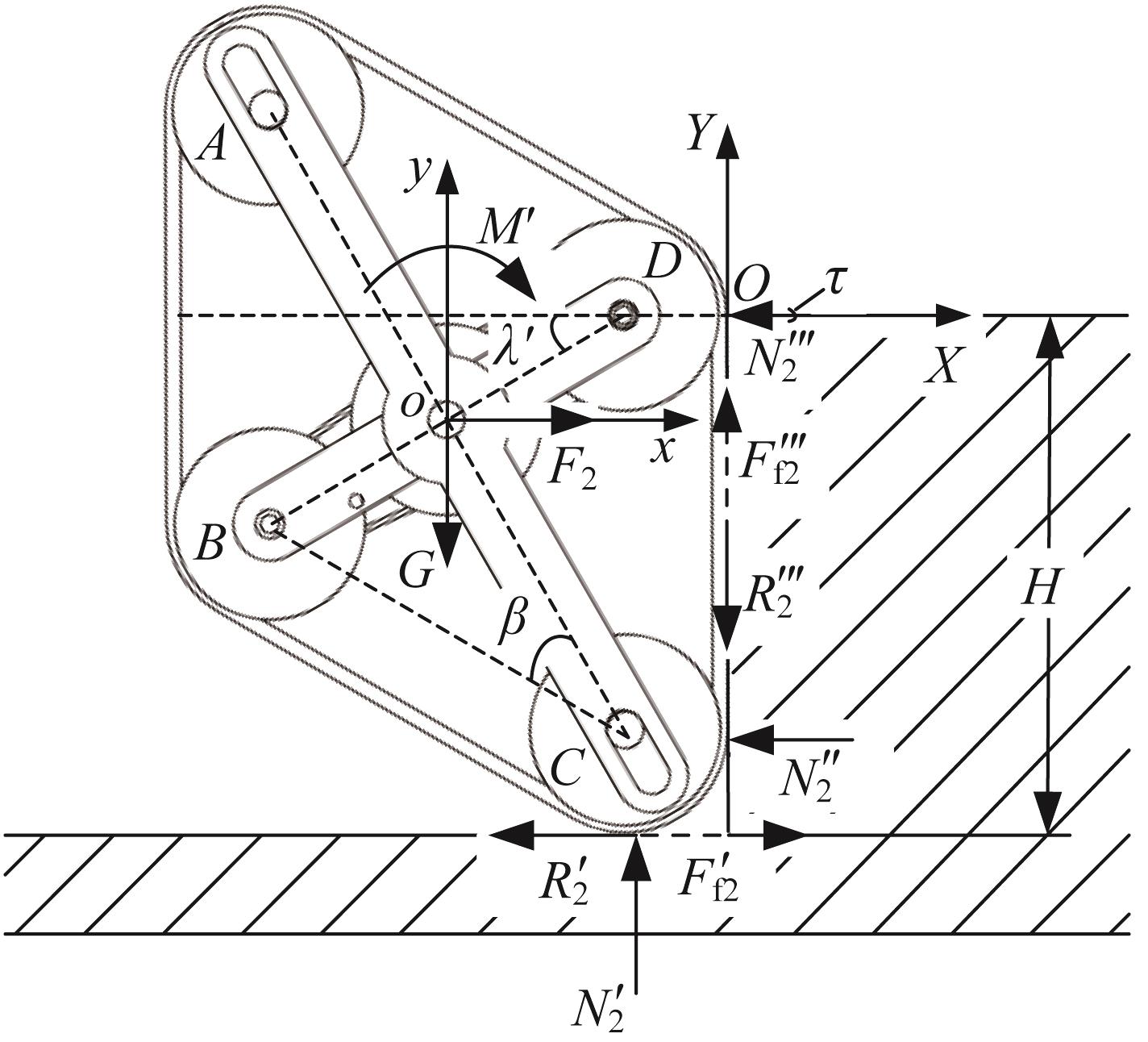
Fig.19 Analysis diagram of transition mode tracked mobile mechanism during crossing trench
|
|
|
|
Fig.20 Analysis diagram of transition mode tracked mobile mechanism during surmounting protrusion
|
|
|
|
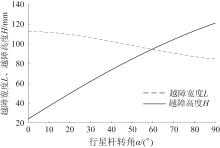
Fig.21 Relationship between obstacle-crossing width/height and planetary rod rotation angle of transition mode tracked mobile mechanism
|
|

|
|
Fig.22 Simulation process of straight-arm mode tracked mobile mechanism crossing trench
|
|
|
|
Fig.23 Driving torque of straight-arm mode tracked mobile mechanism during crossing trench
|
|
|
|
Fig.24 Simulation process of orthogonal mode tracked mobile mechanism surmounting protrusion
|
|
|
|
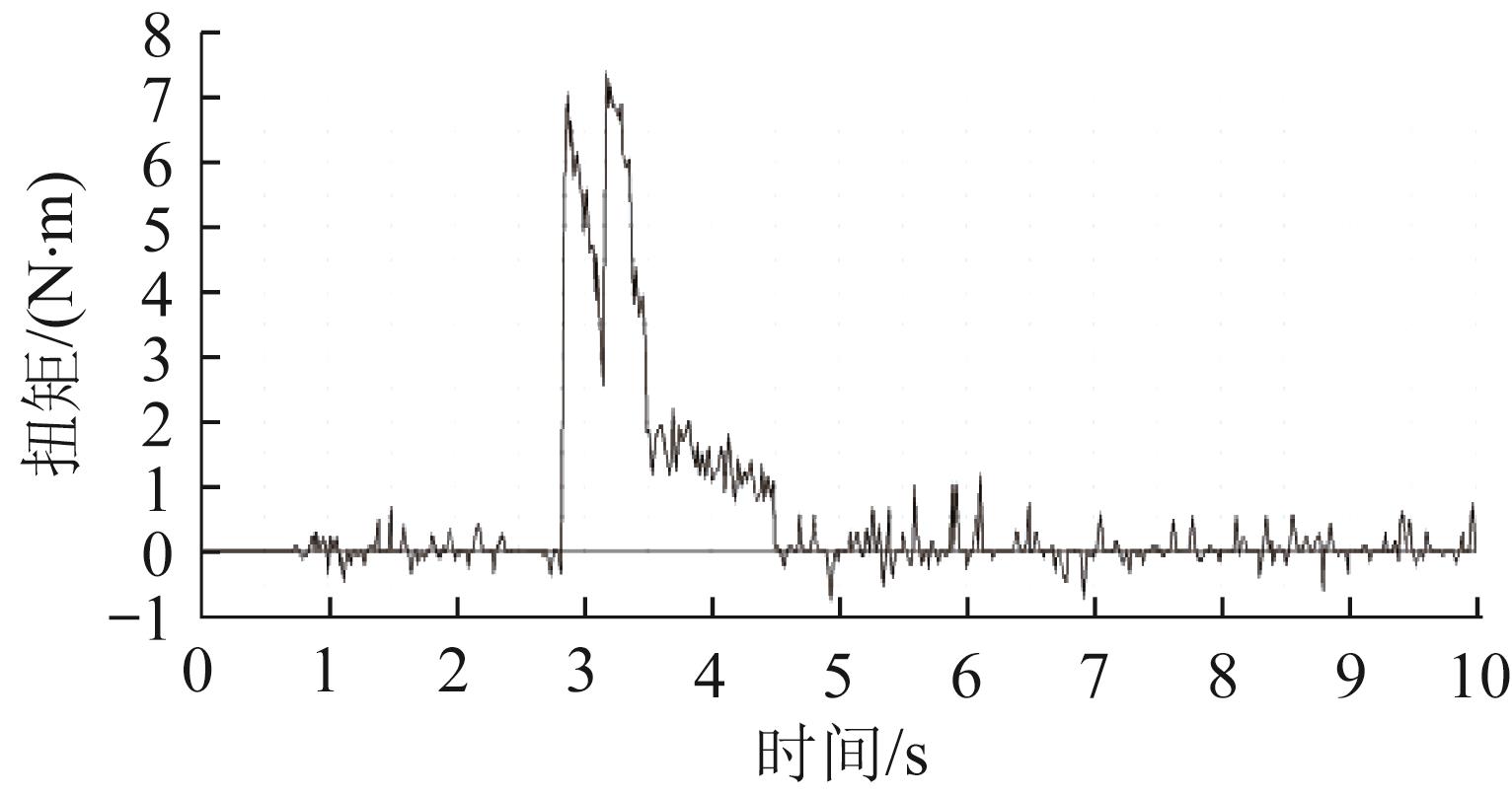
Fig.25 Driving torque of orthogonal mode tracked mobile mechanism during surmounting protrusion
|
|

|
|
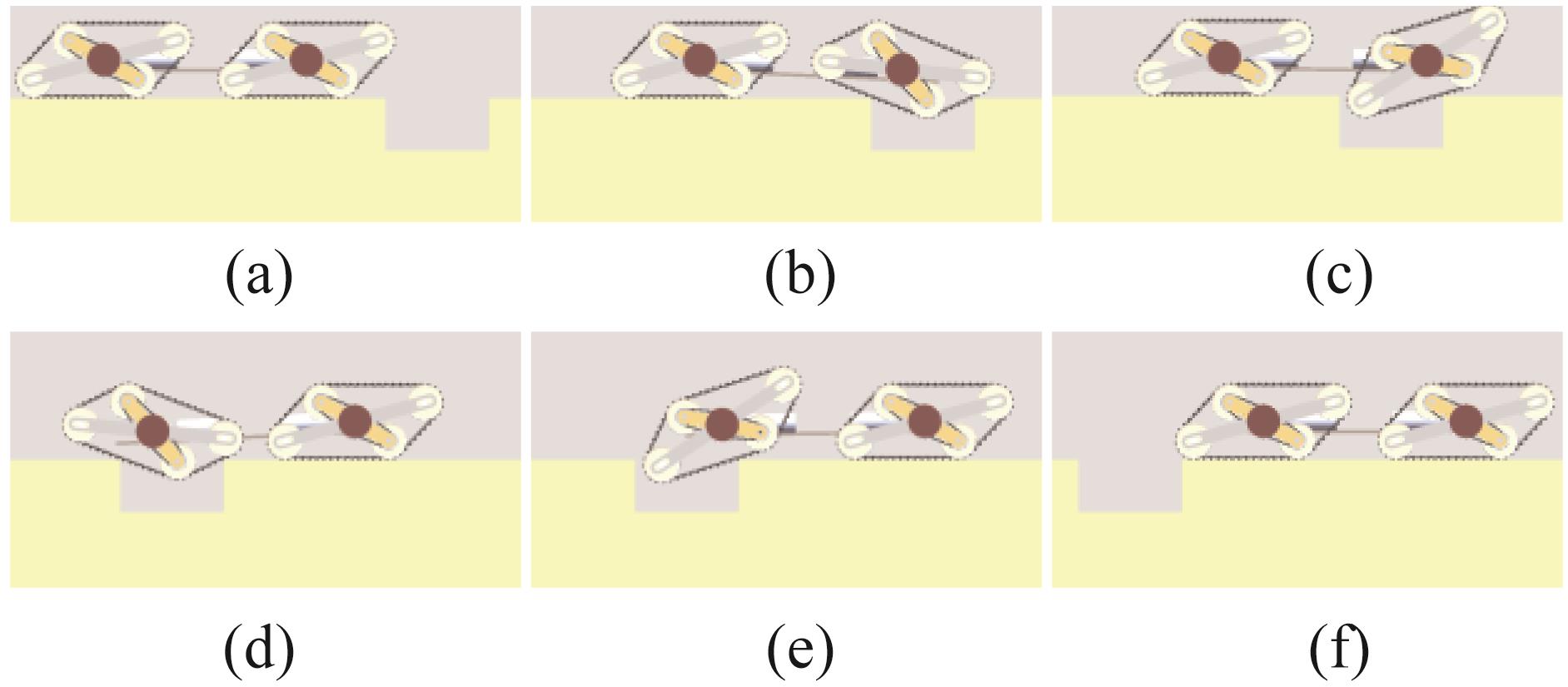
Fig.26 Simulation process of transition mode tracked mobile mechanism crossing trench
|
|

|
|
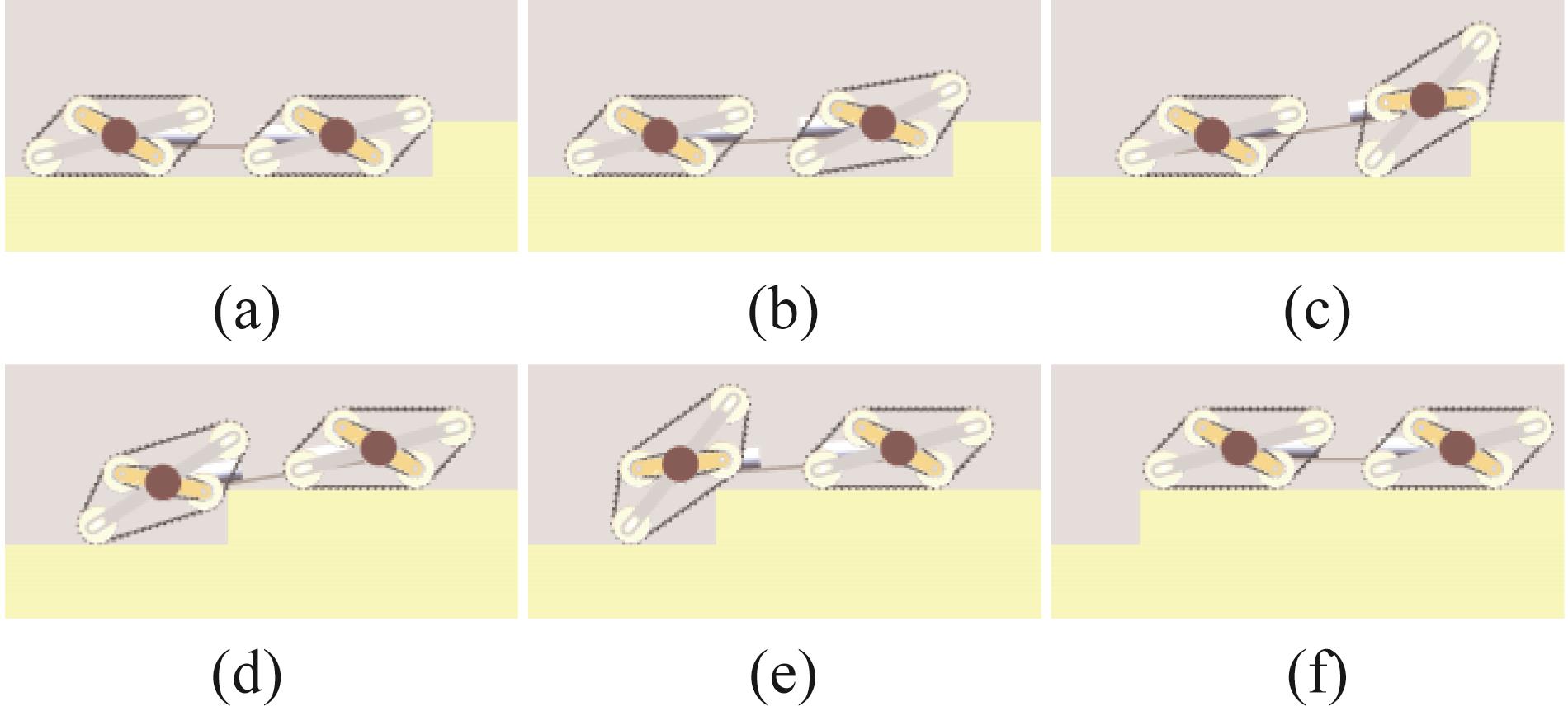
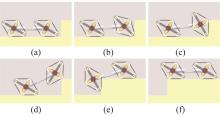
Fig.27 Simulation process of transition mode tracked mobile mechanism surmounting protrusion
|
|
|
|
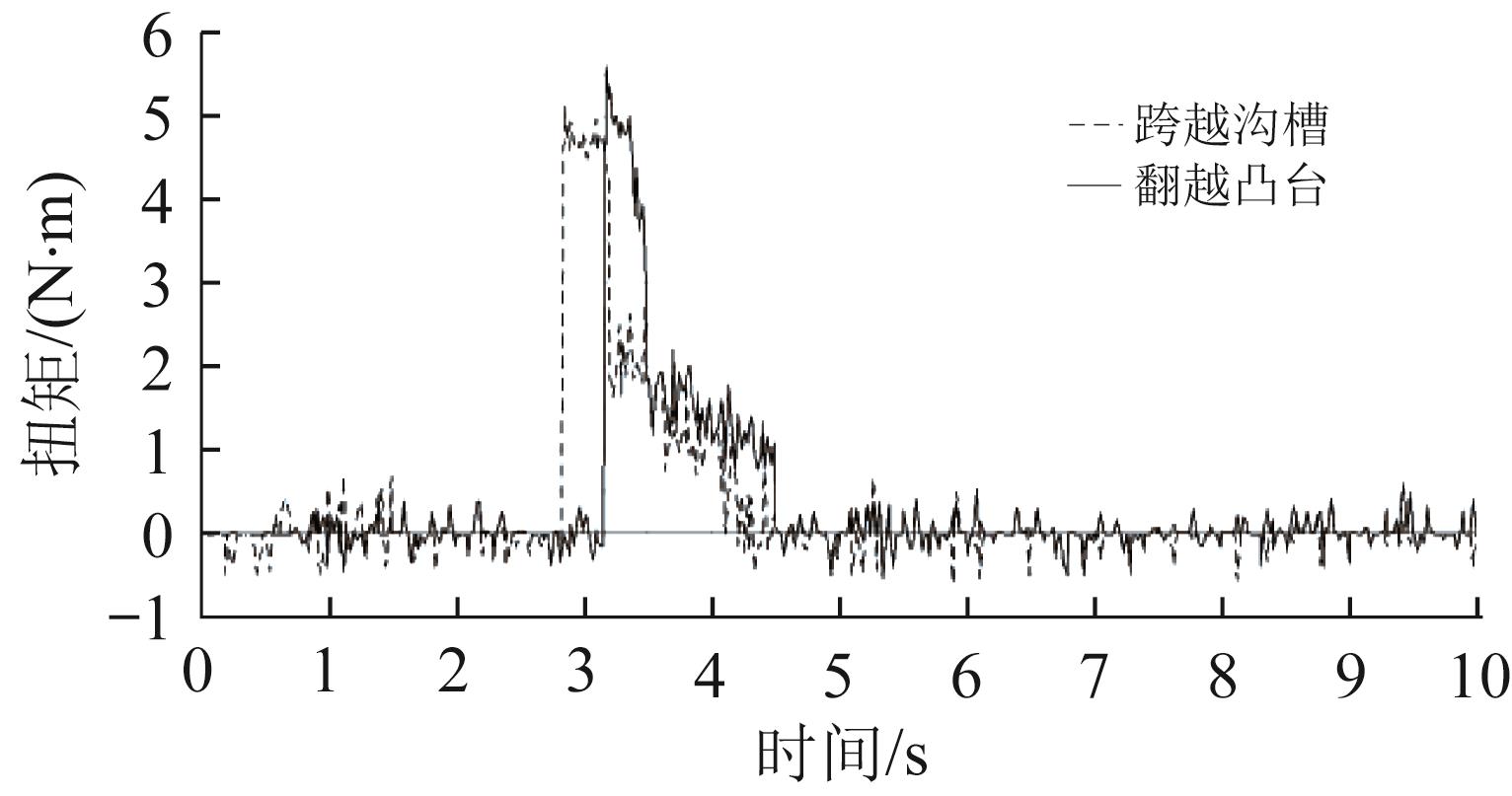
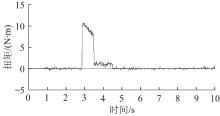
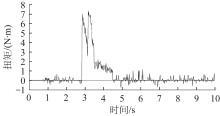
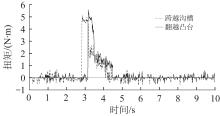
Fig.28 Driving torque of transition mode tracked mobile mechanism during crossing obstacles
|
|

|
|
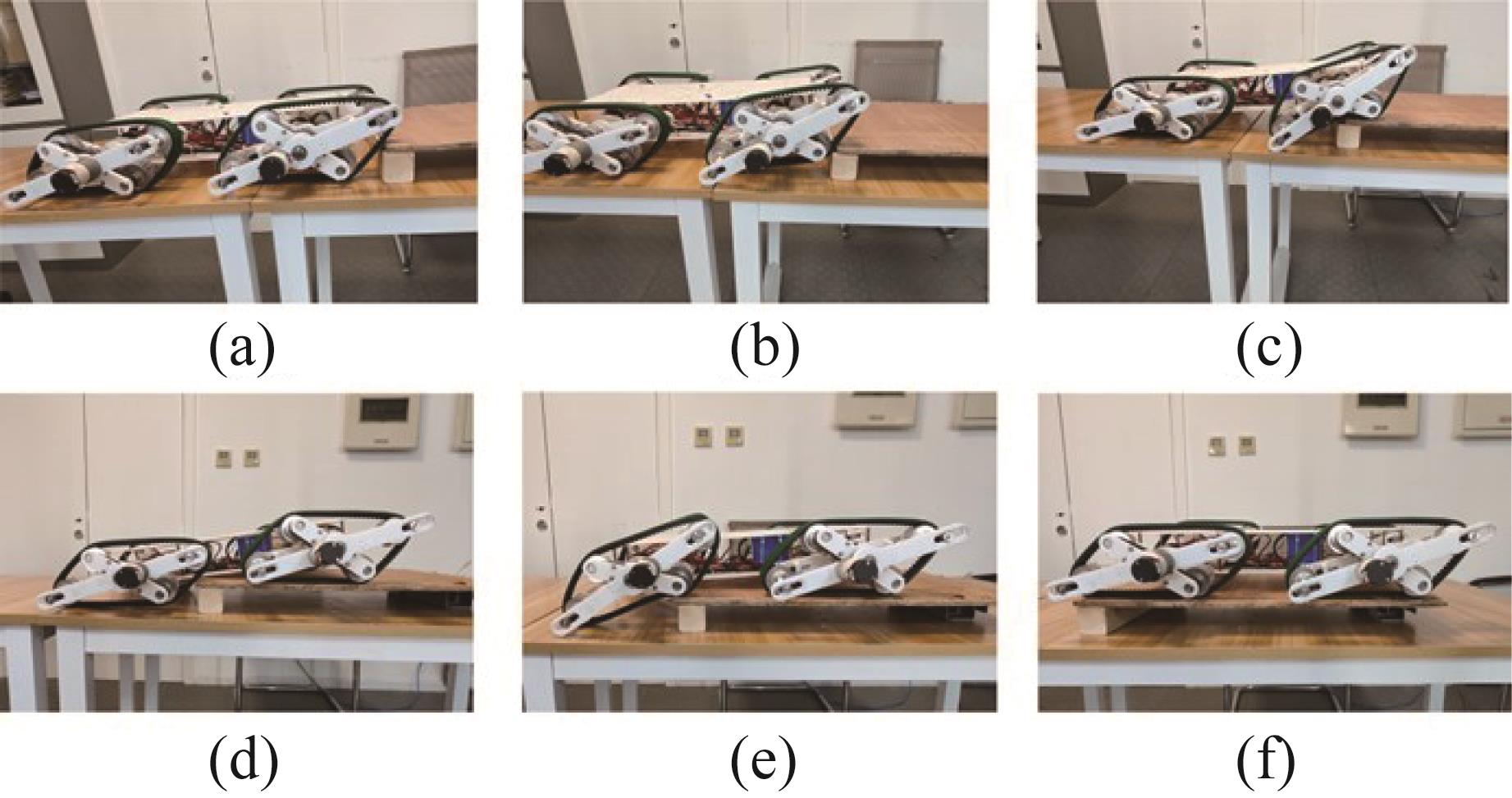
Fig.29 Experiment of straight-arm mode tracked mobile mechanism crossing trench
|
|
|
|
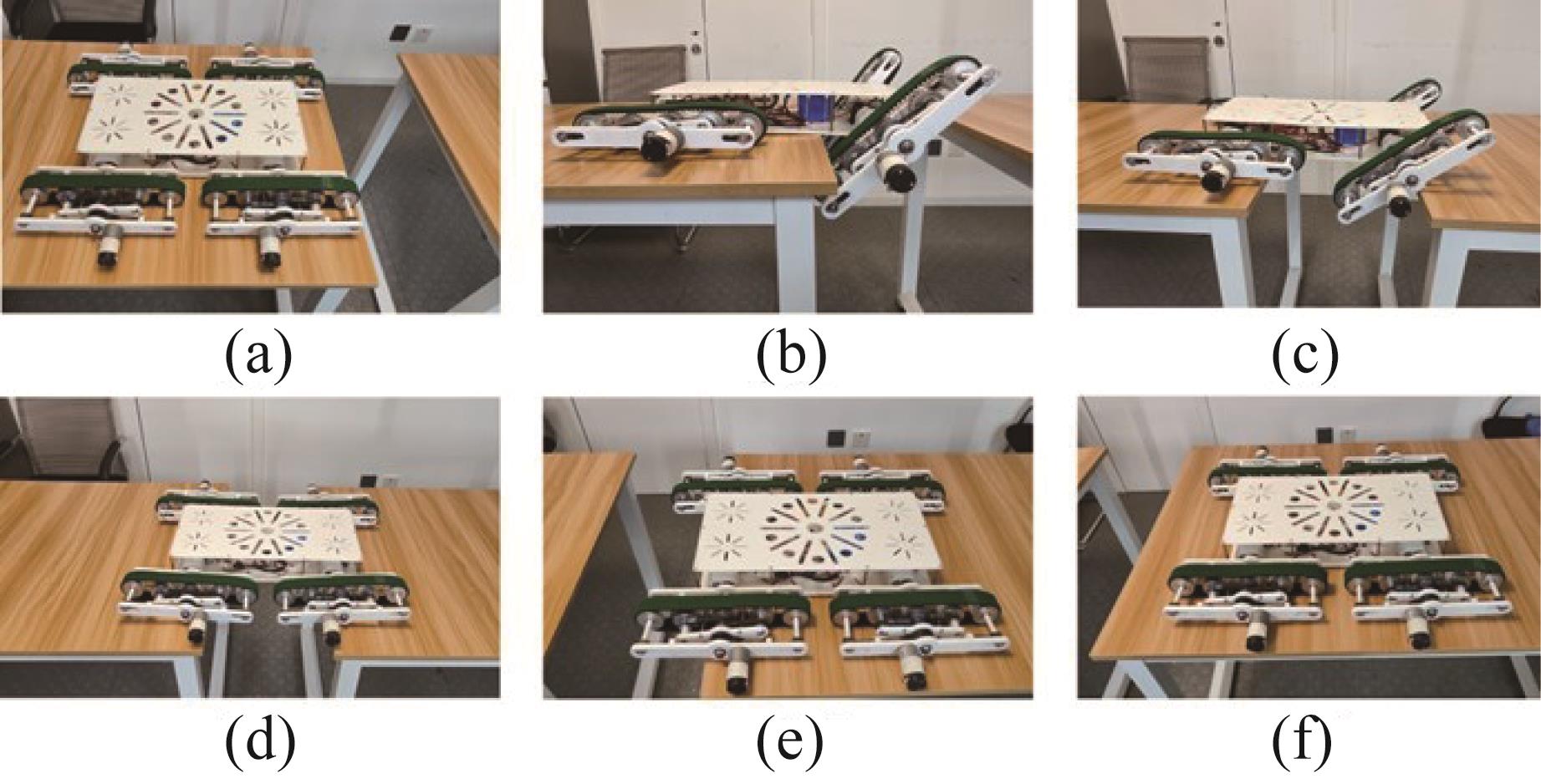
Fig.30 Experiment of orthogonal mode tracked mobile mechanism surmounting protrusion
|
|

|
|
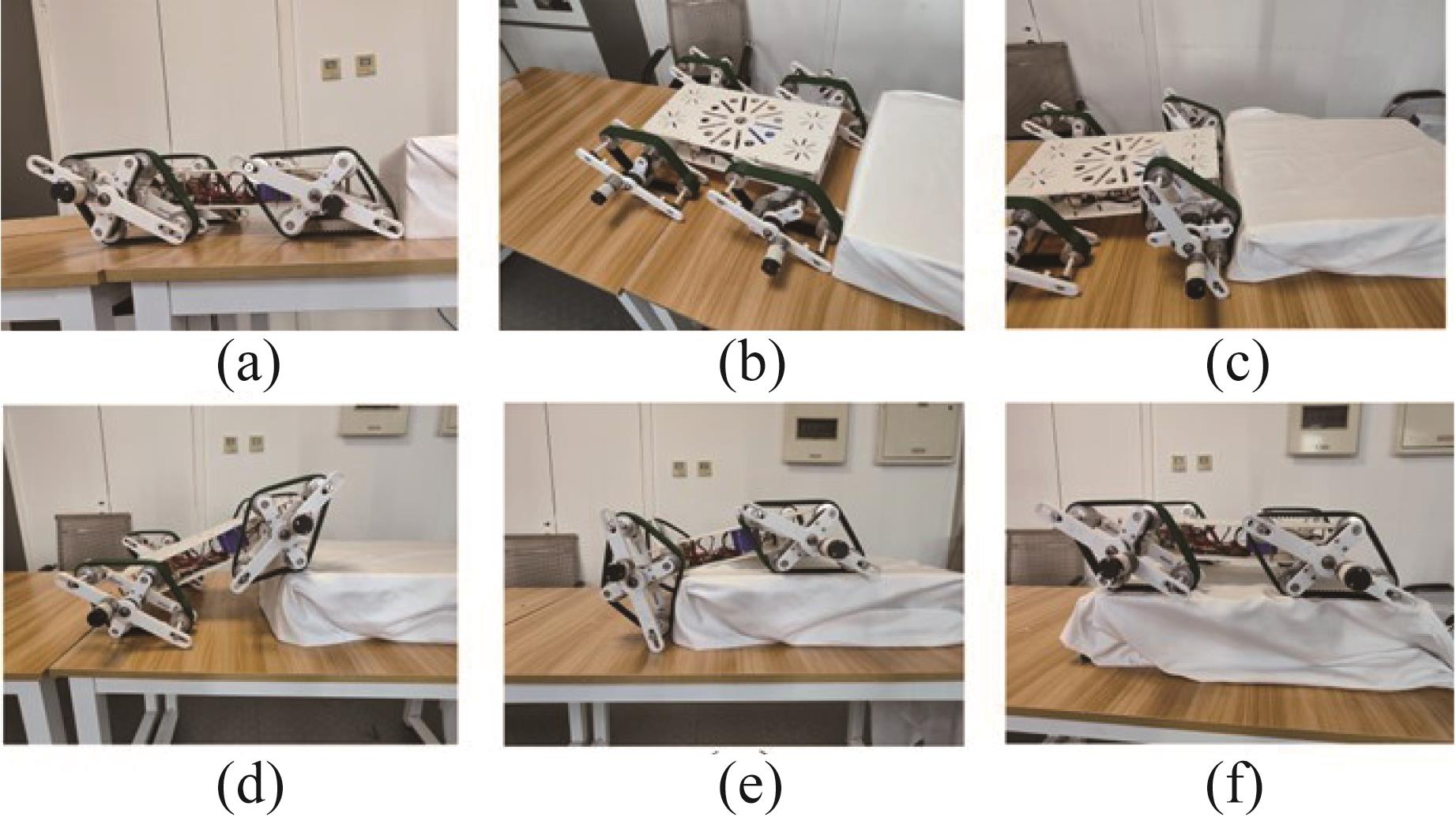
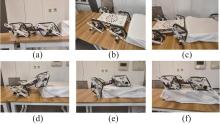
Fig.31 Experiment of transition mode tracked mobile mechanism surmounting protrusion
|