基于改进蜻蜓算法的磁齿轮复合电机控制研究
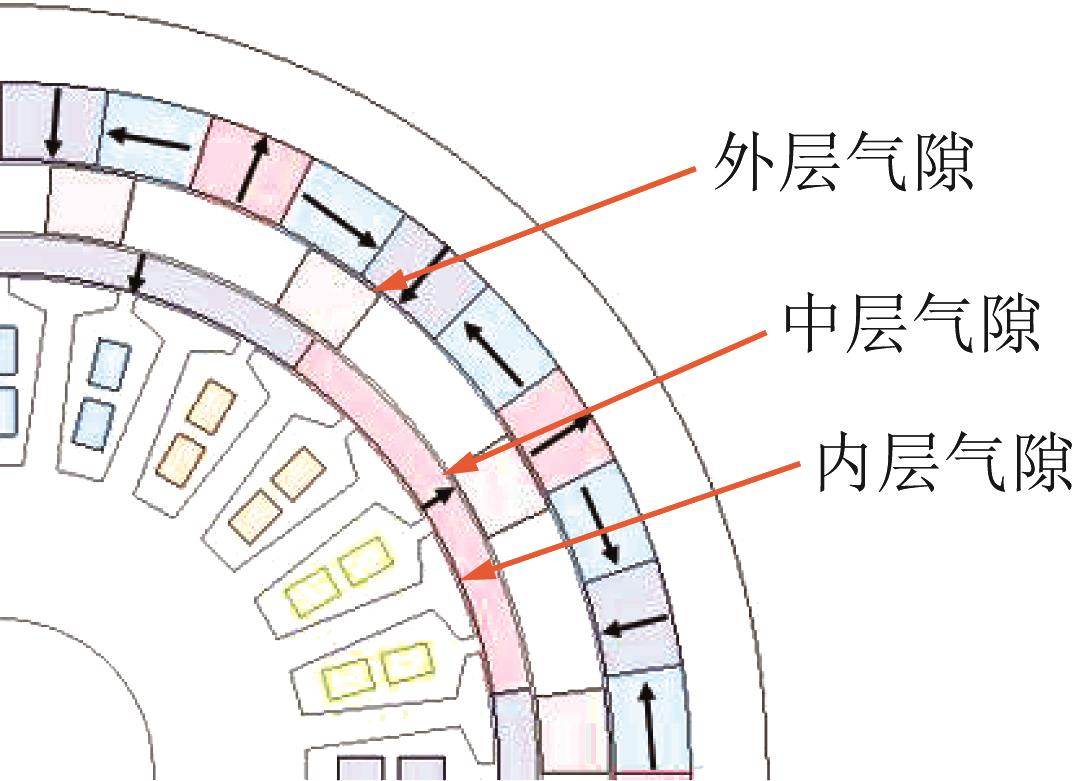
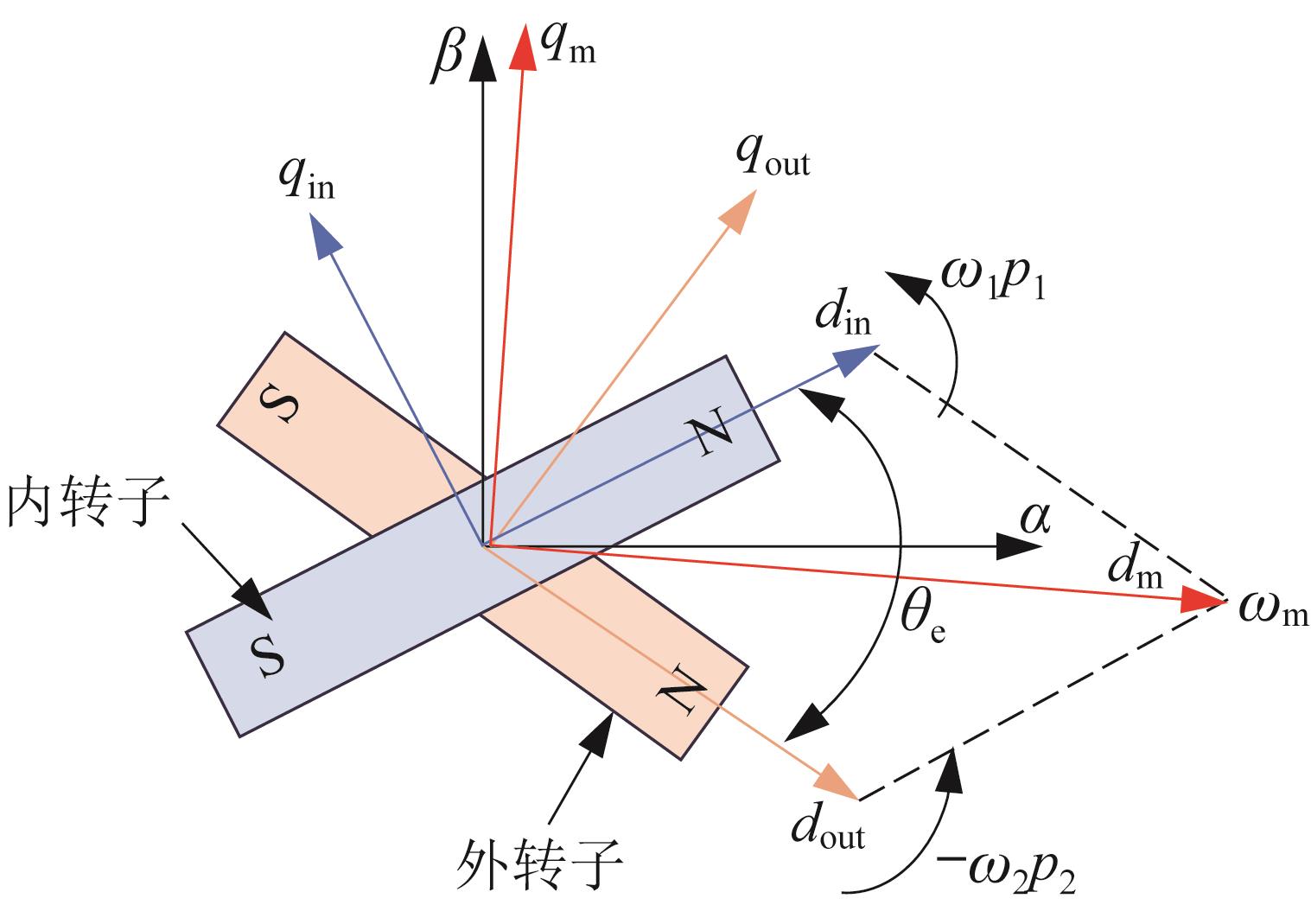
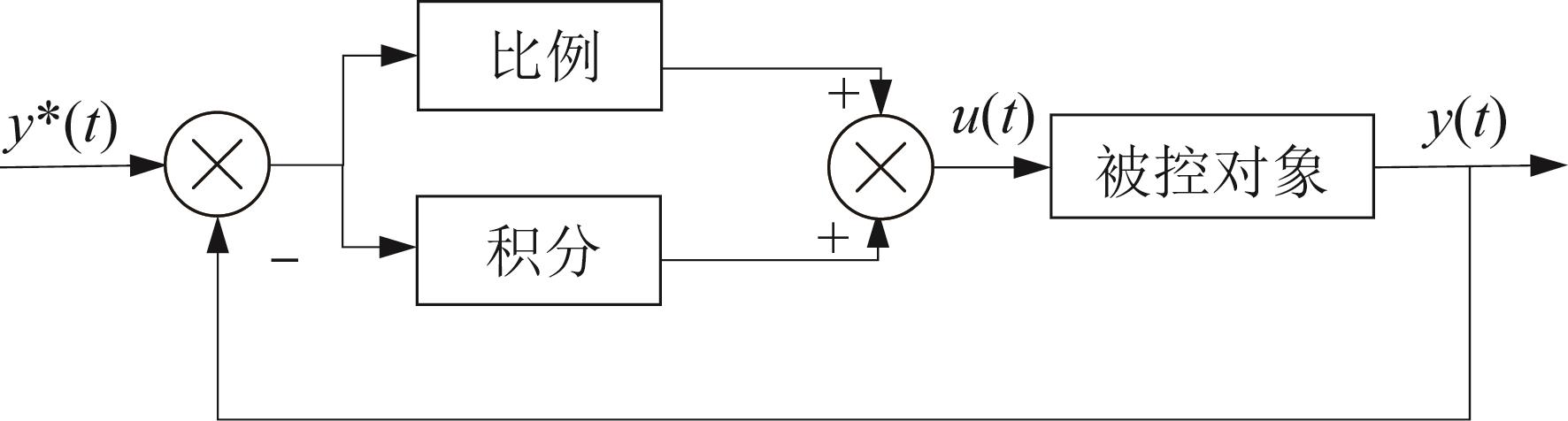
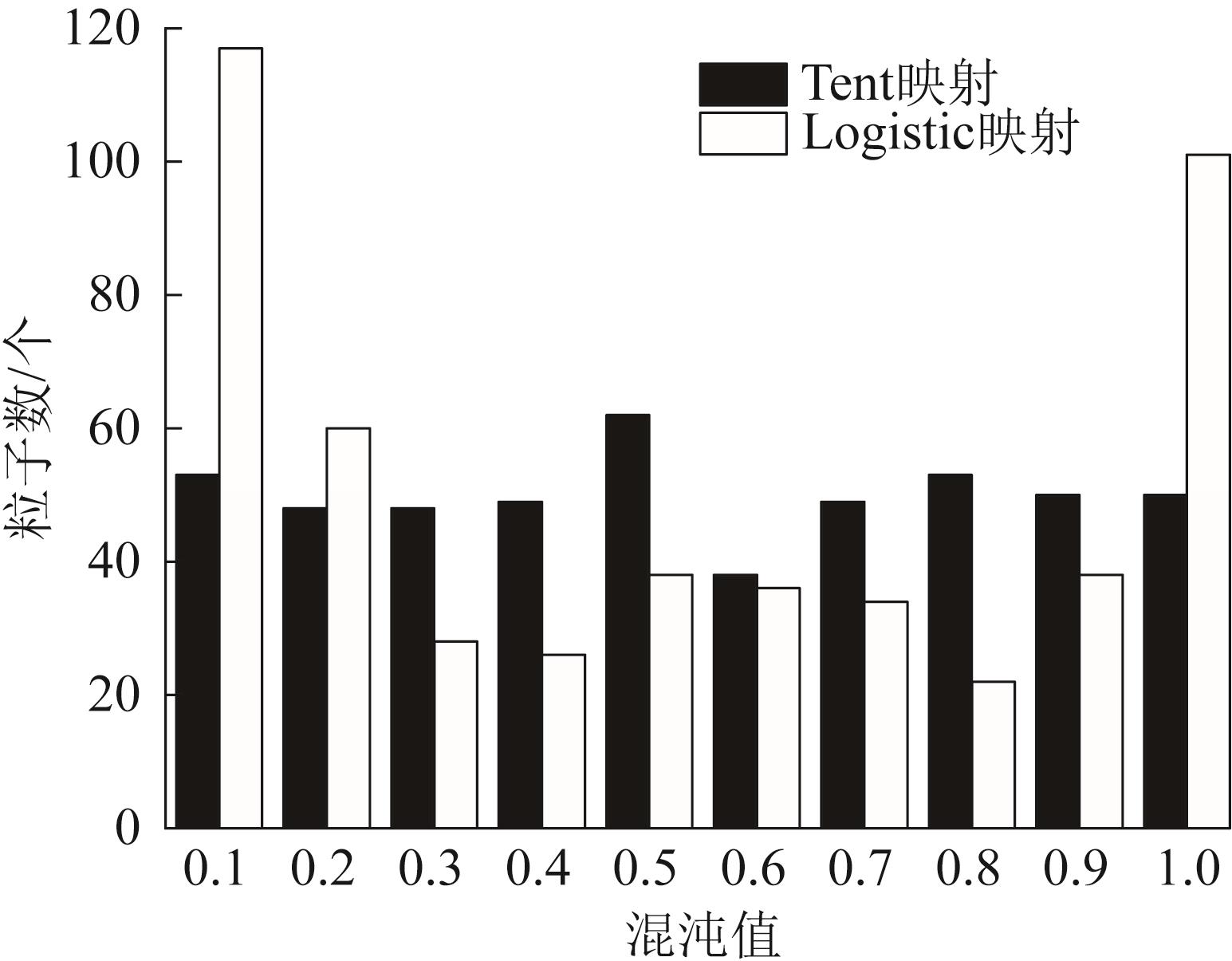
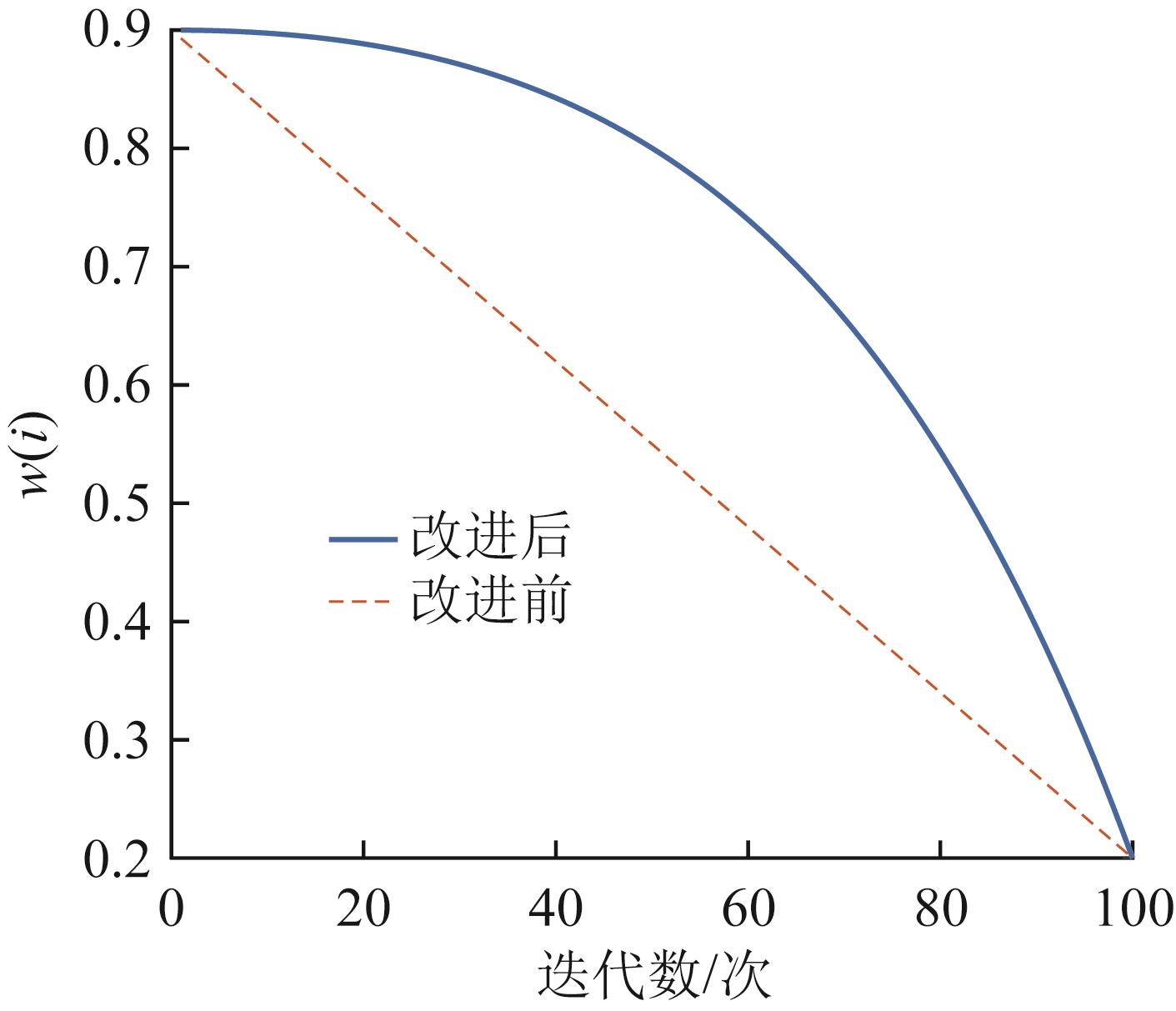
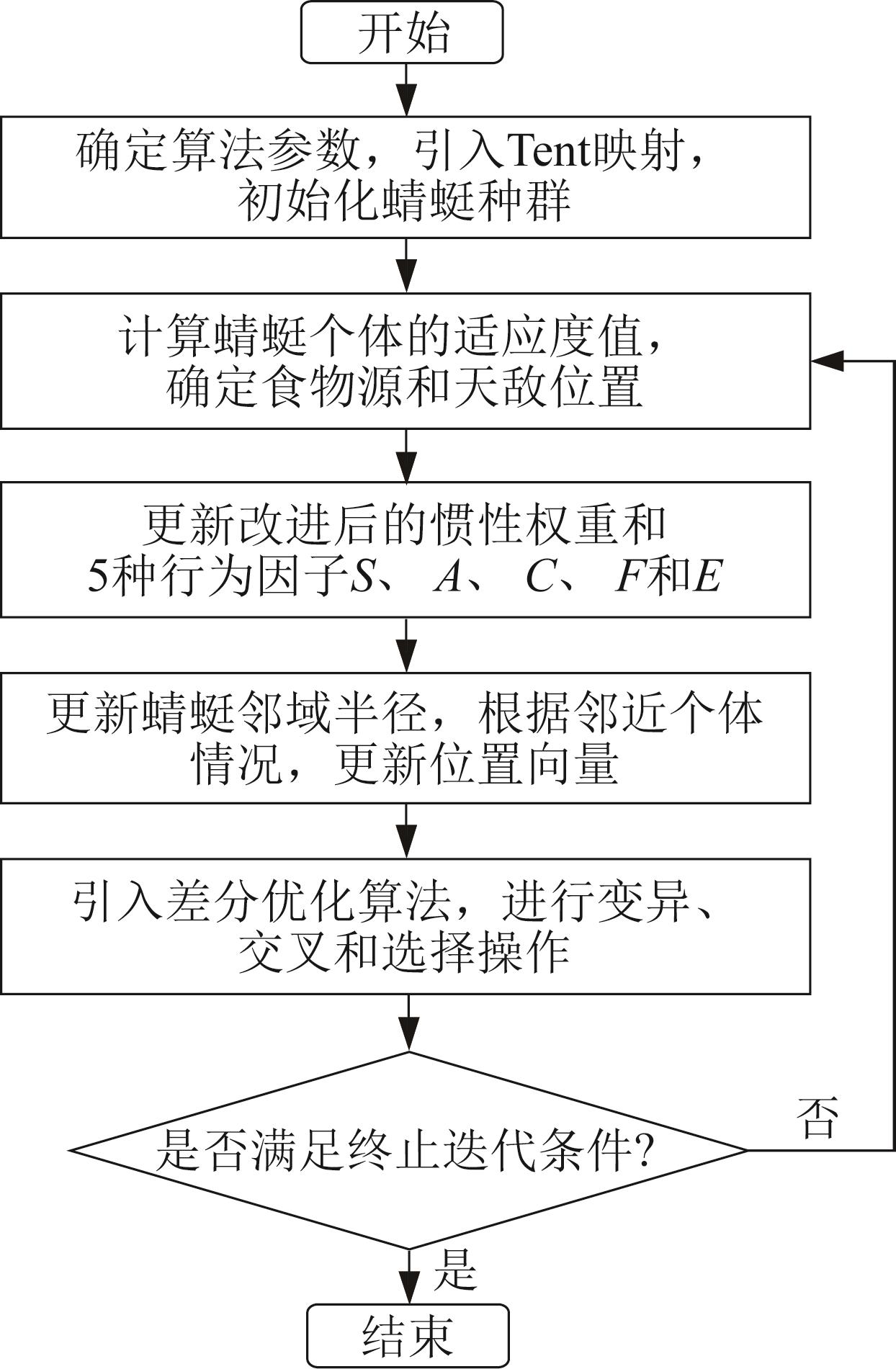
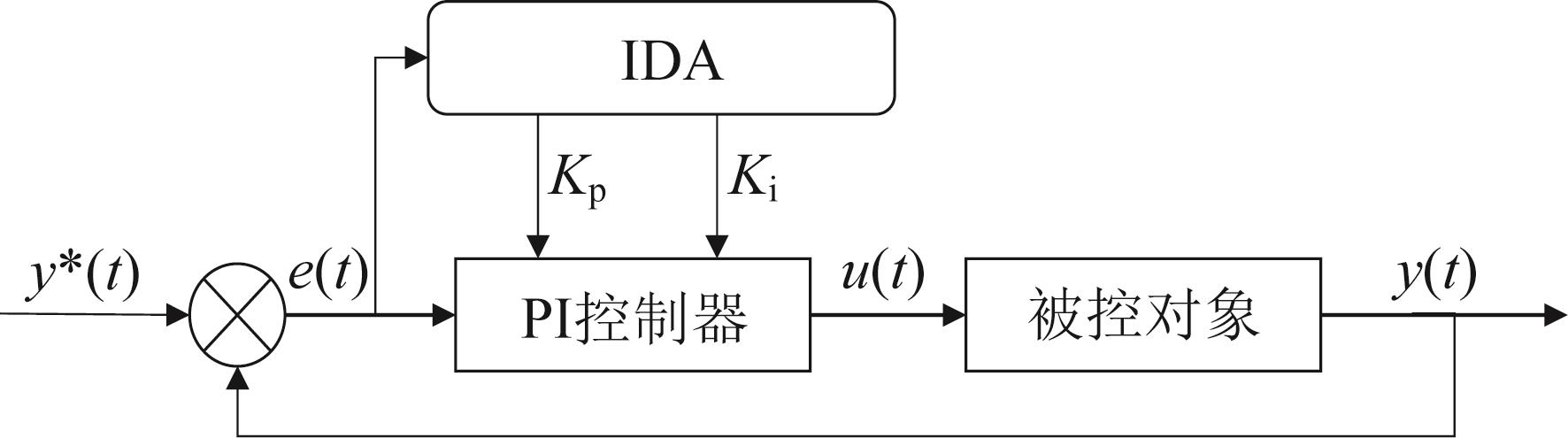
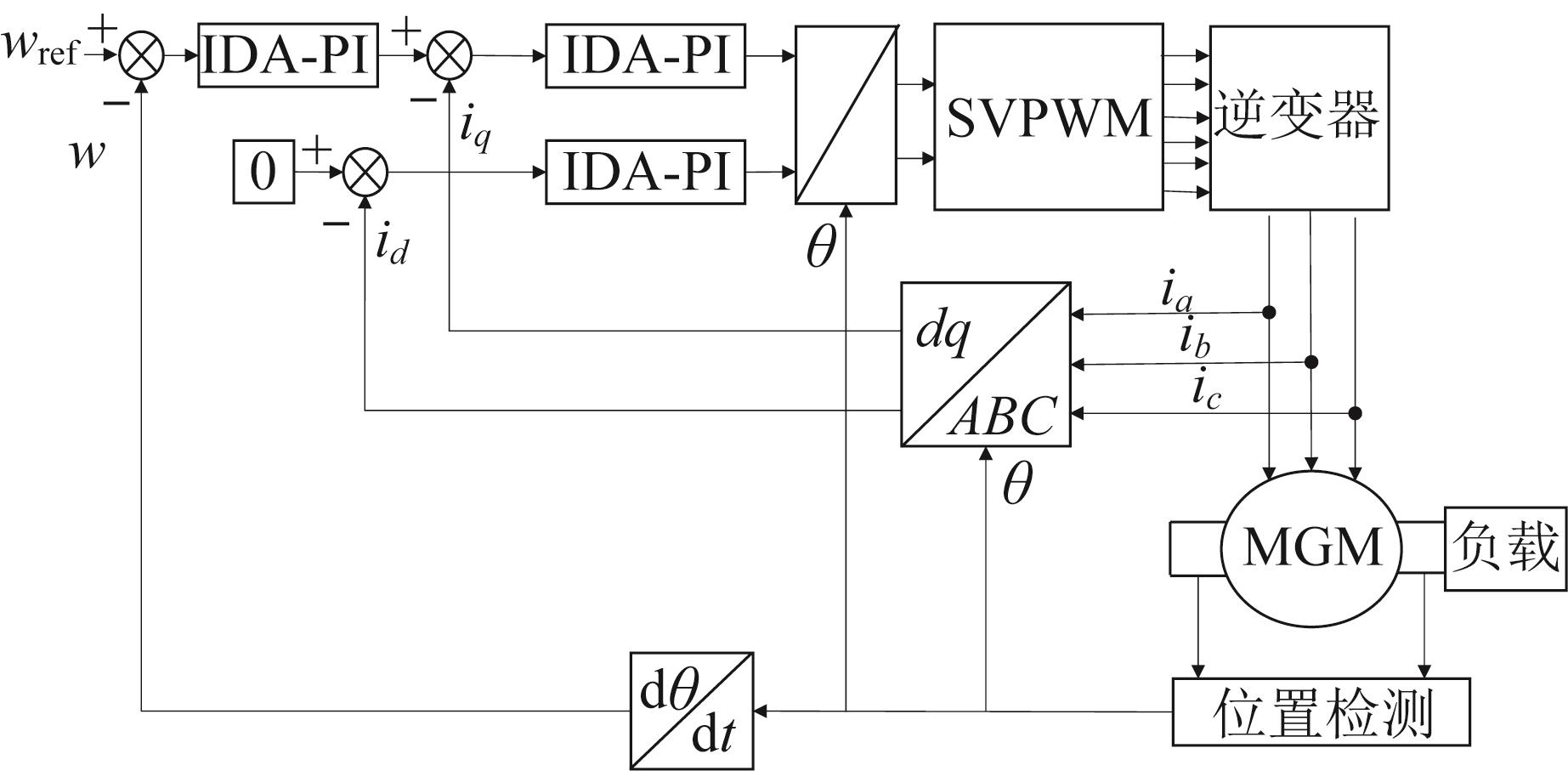
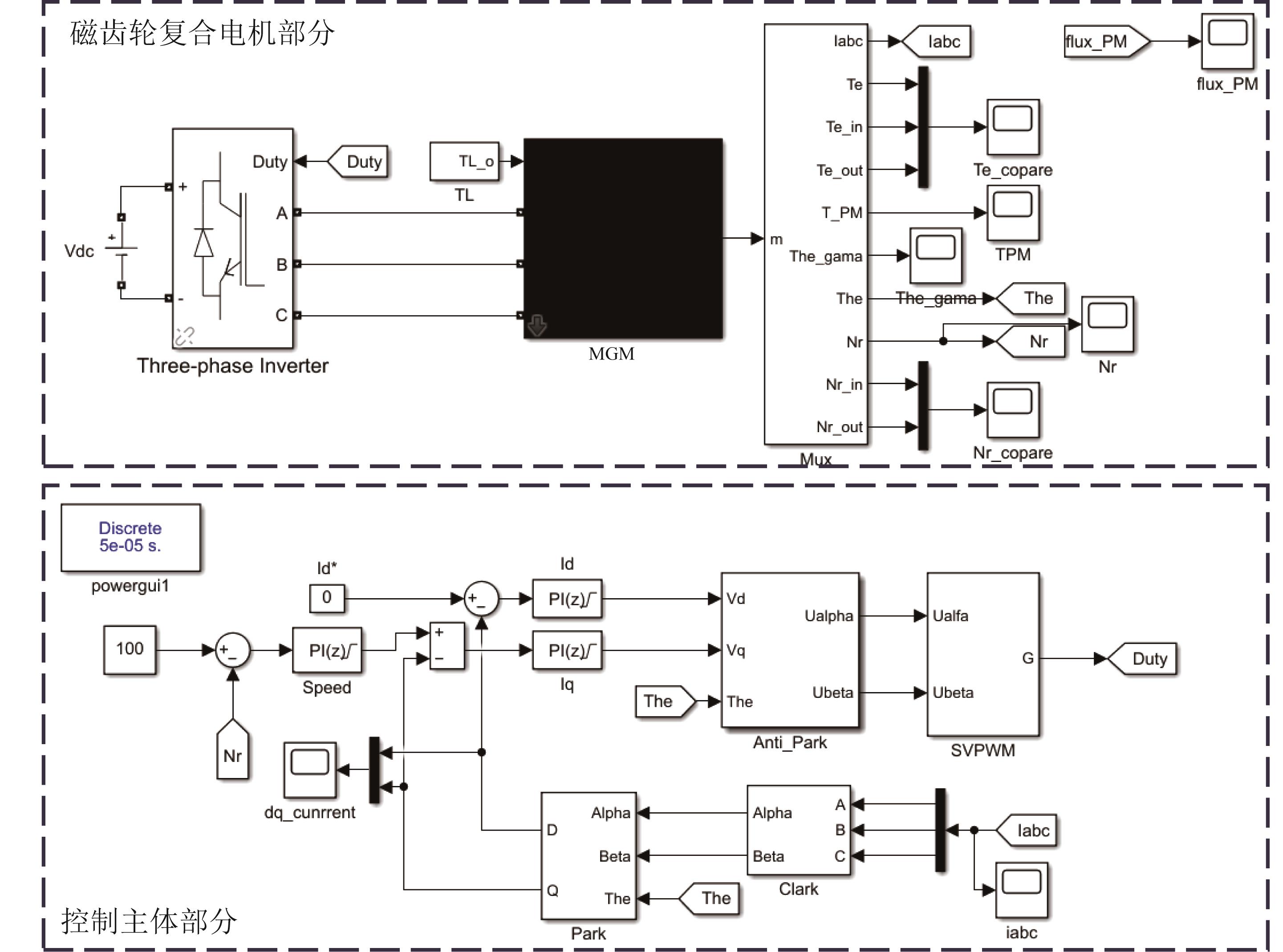
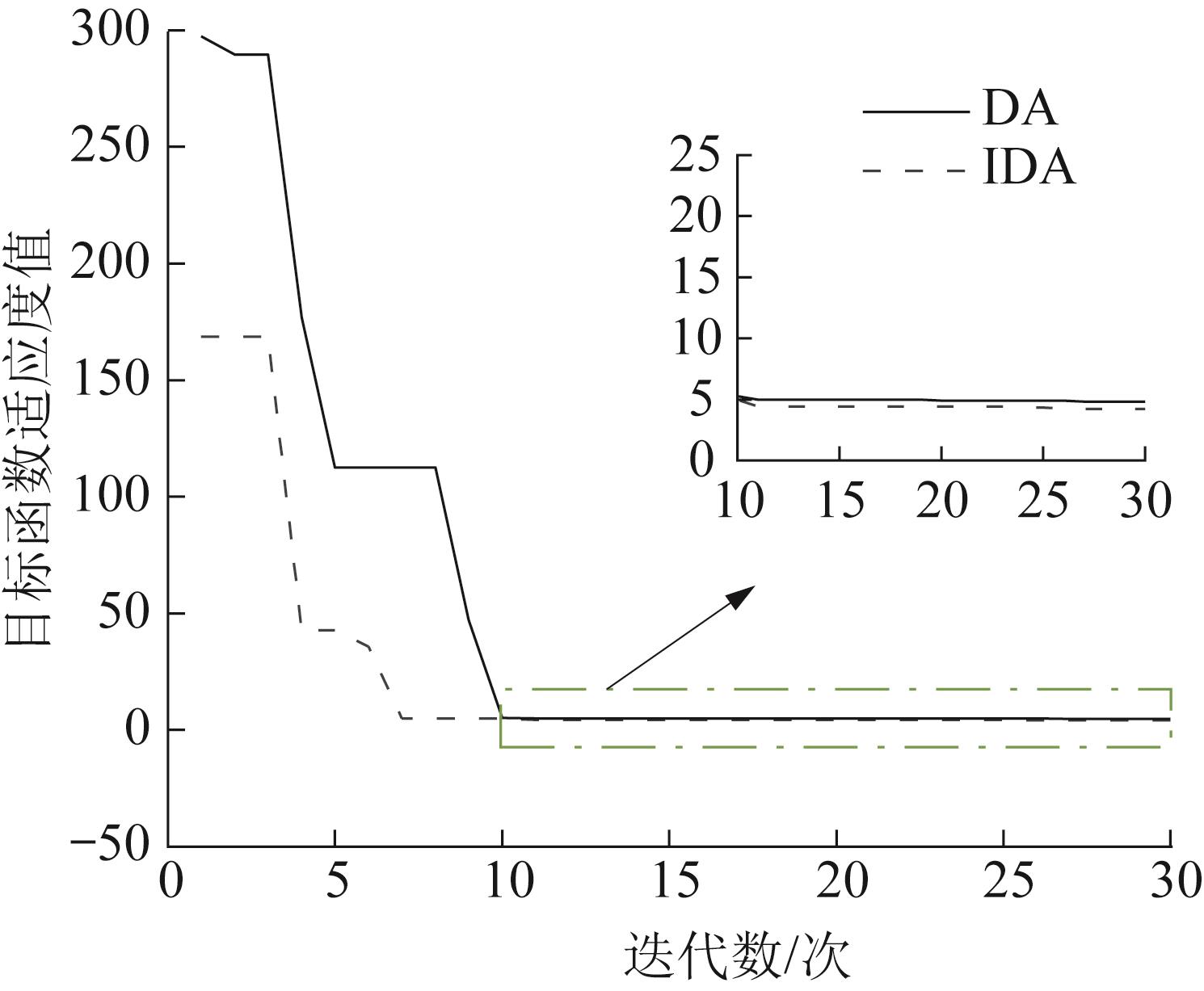
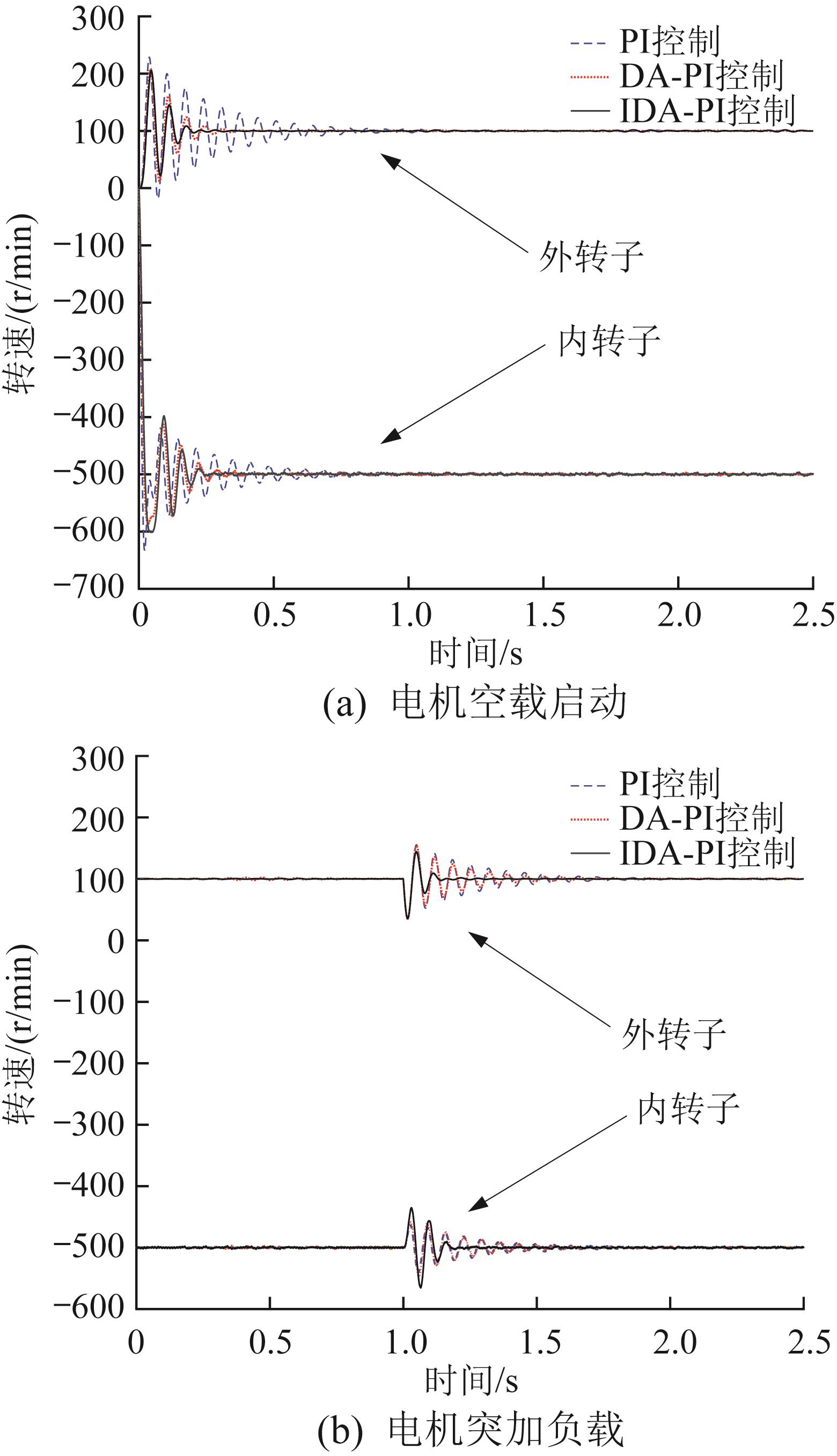
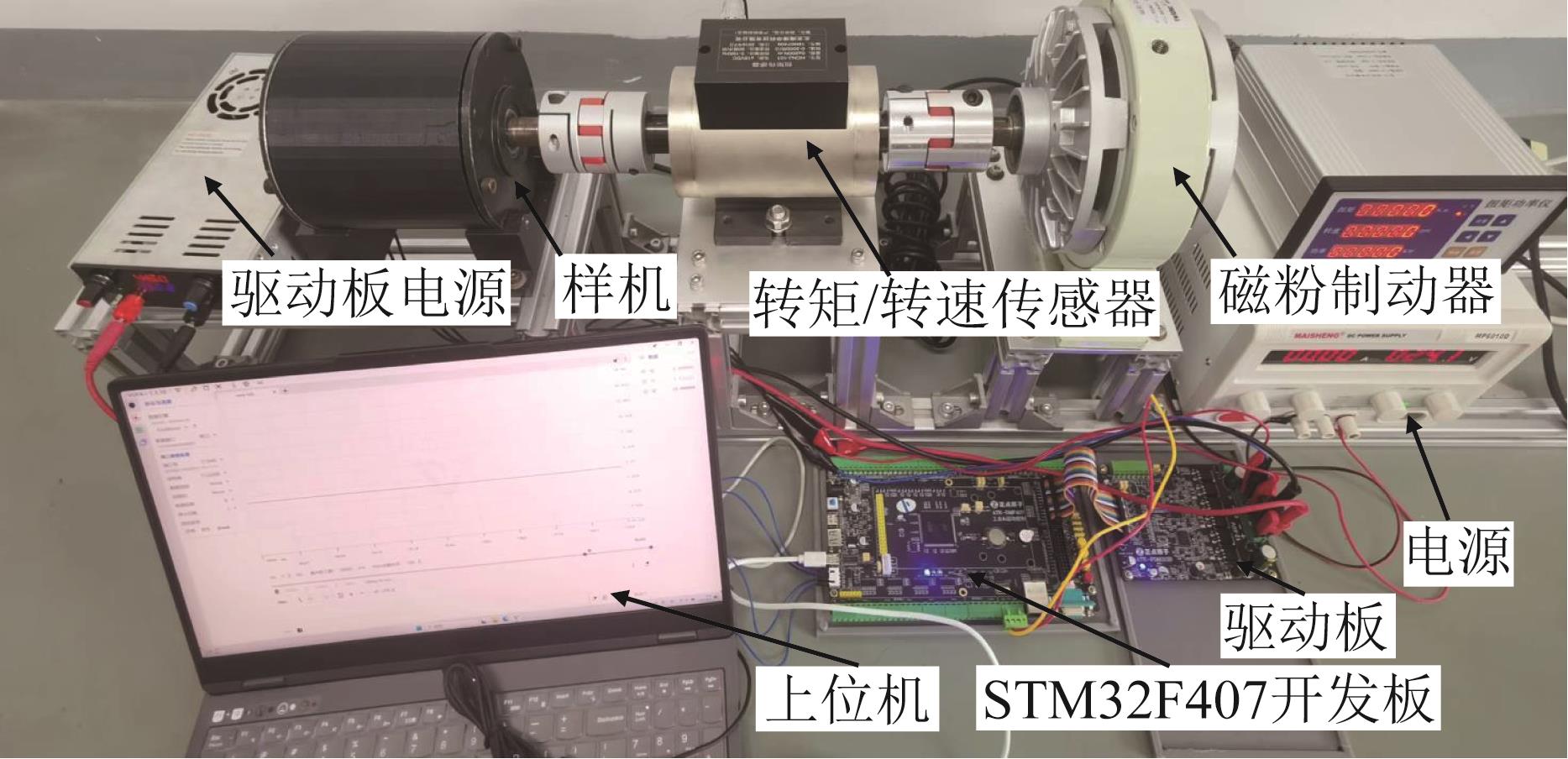
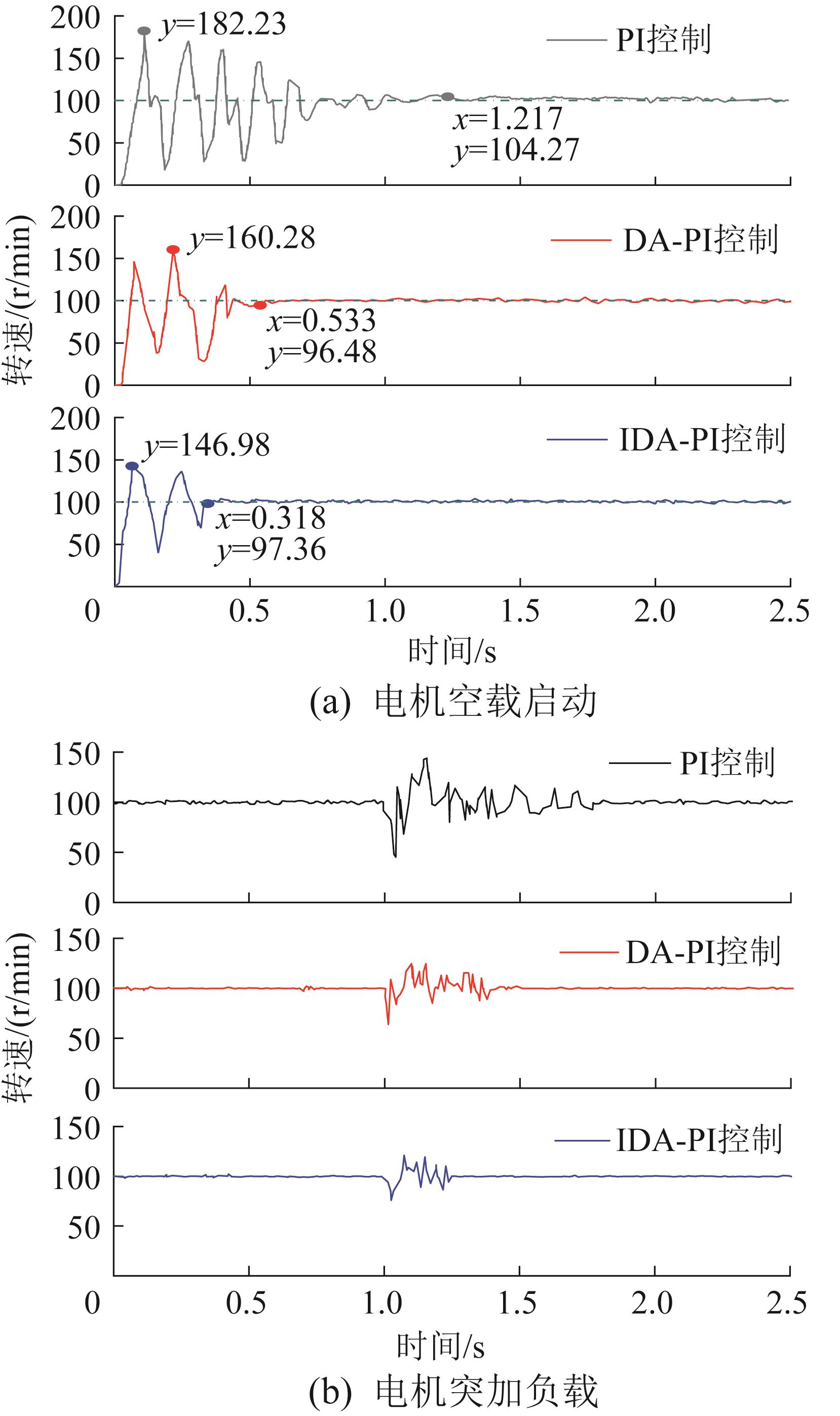
针对磁齿轮复合电机双转子结构在无接触传动时出现振荡和超调的问题,提出了一种基于改进蜻蜓算法(improved dragonfly algorithm,IDA)的双闭环PI(proportional integral,比例积分)参数自整定矢量控制方法。针对DA在收敛速度和收敛精度等方面存在的不足,分别在算法寻优的前期、中期和后期引入Tent映射、改进权重系数和差分优化算法,并在其适应度函数上增加可抑制振荡和超调的惩罚项,使算法的收敛速度和收敛精度得到明显提高。采用PI、DA-PI和IDA-PI三种控制方法对磁齿轮复合电机进行控制仿真和实验,结果表明,在IDA-PI控制下电机转速的超调量和稳态误差最小,动态响应速度最快,证明了所提策略的有效性。研究结果为不同拓扑结构磁齿轮复合电机的控制提供了参考。
关键词:
磁齿轮复合电机,
改进蜻蜓算法,
参数整定,
矢量控制