人机交互遥操作机器人软体手位置跟踪设计与实现
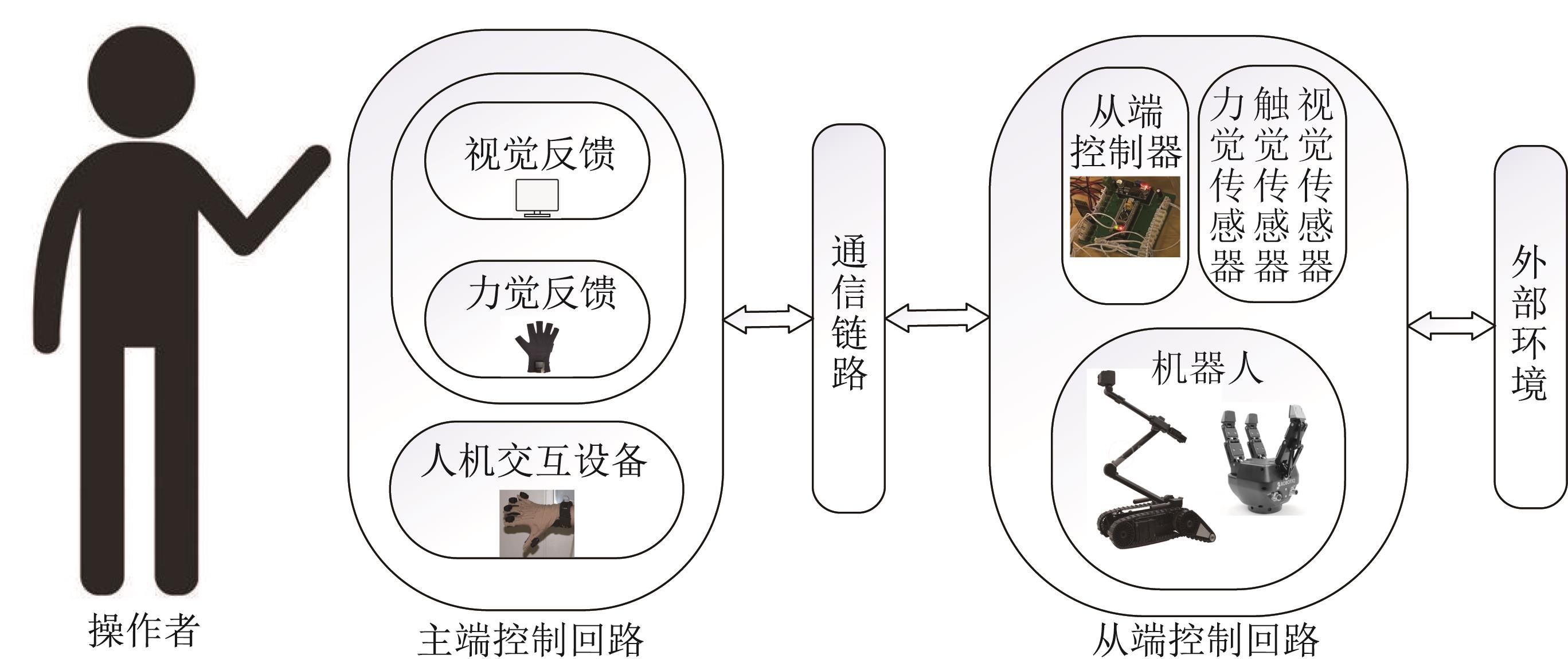
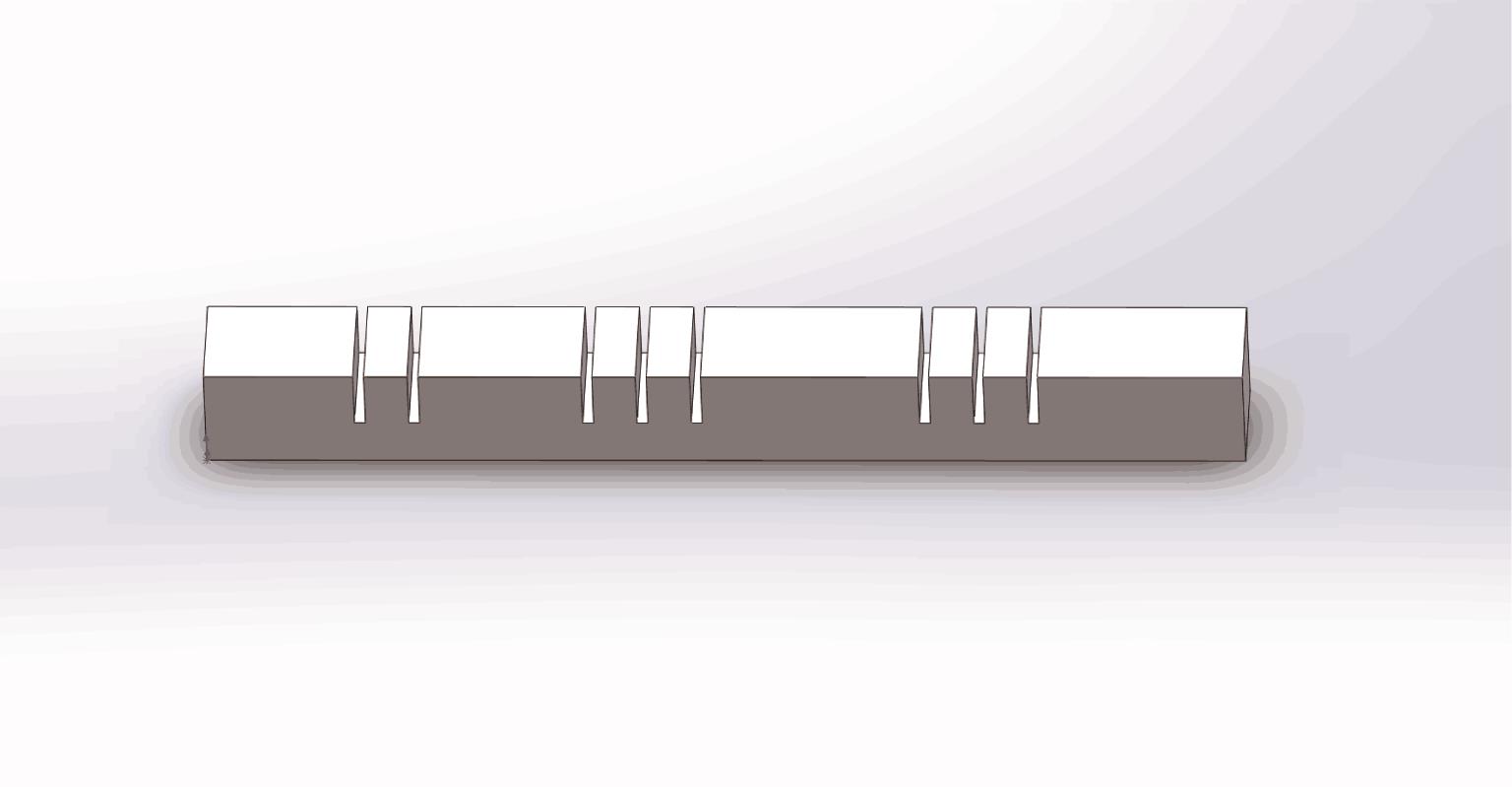
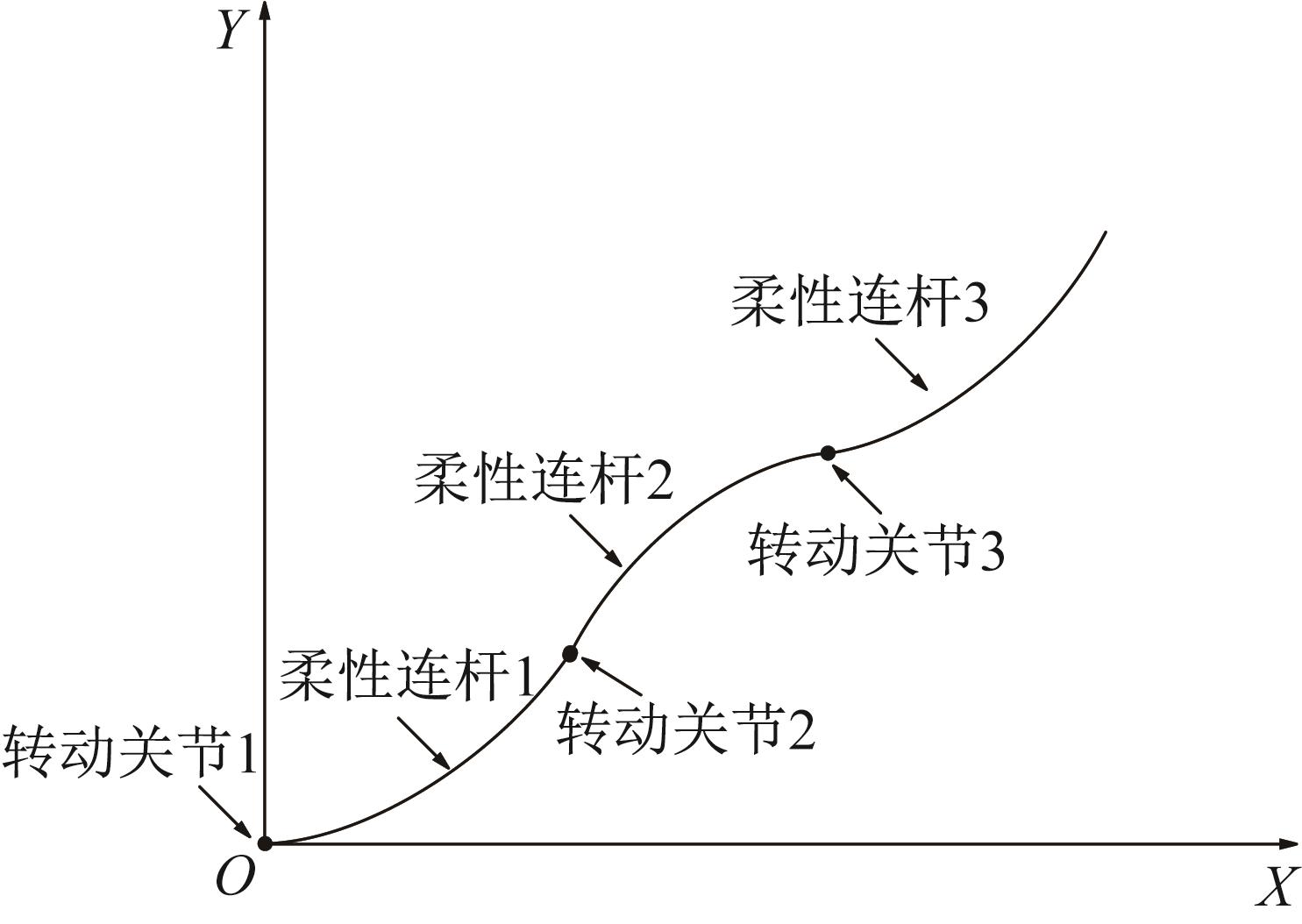
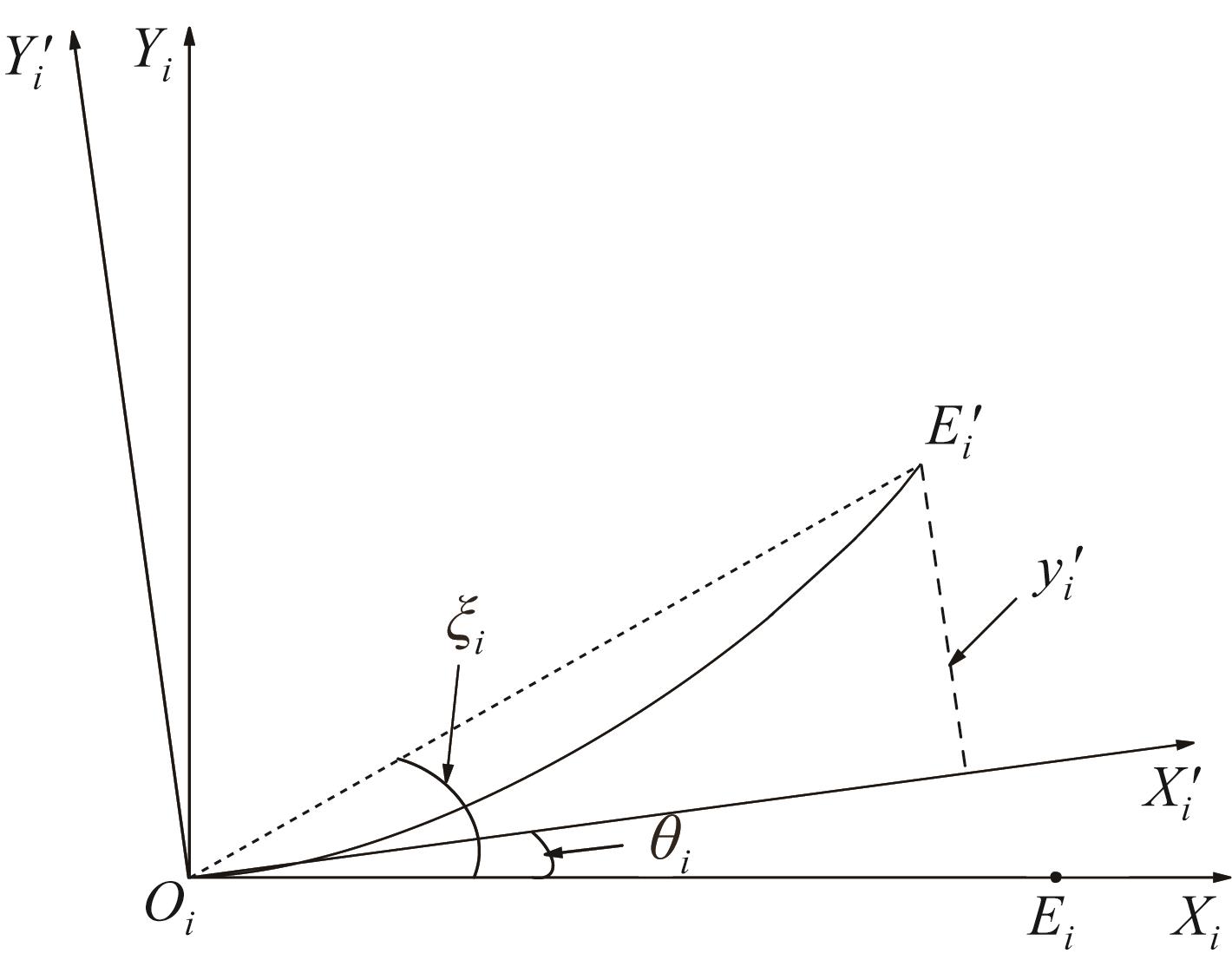
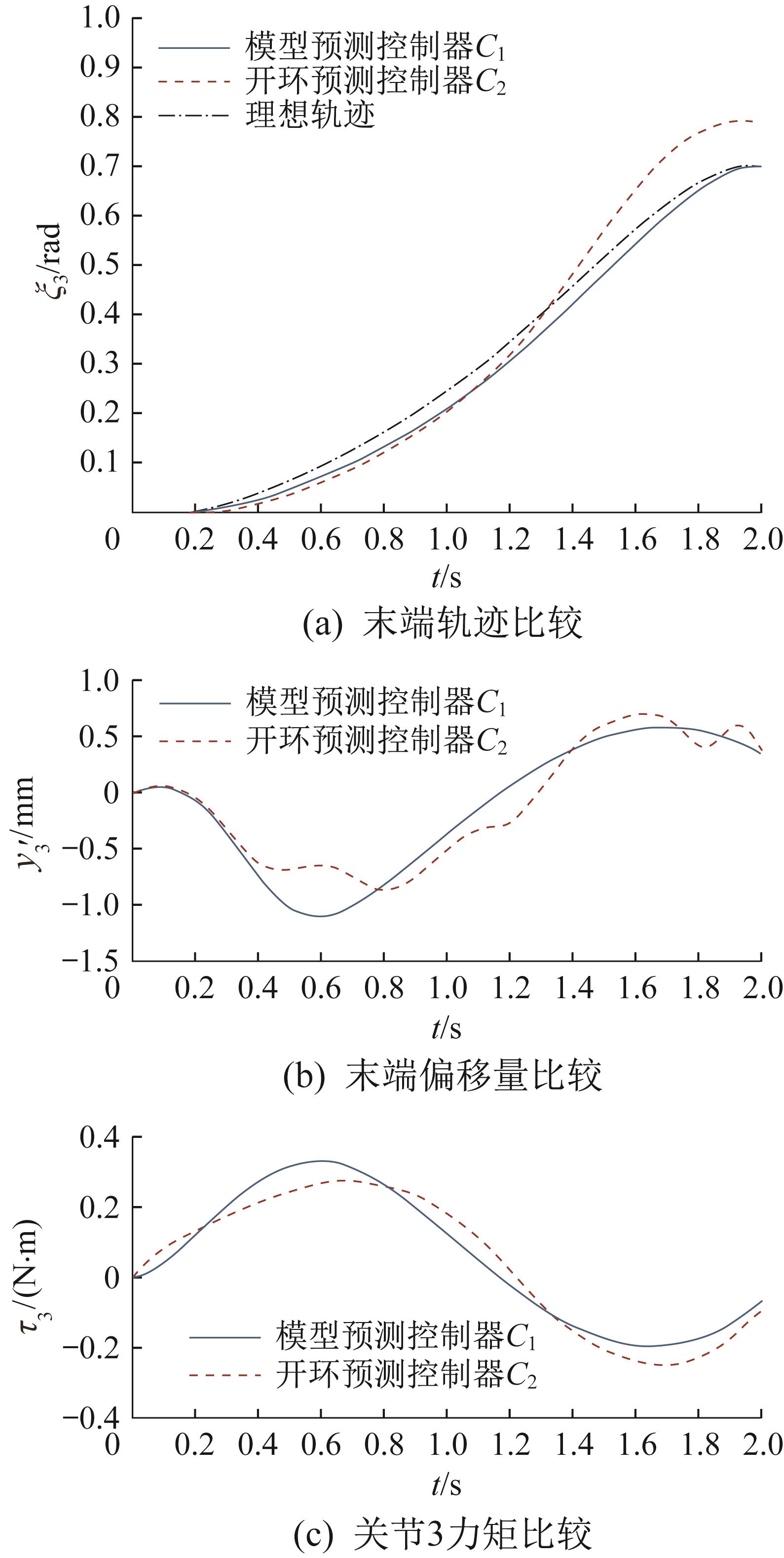
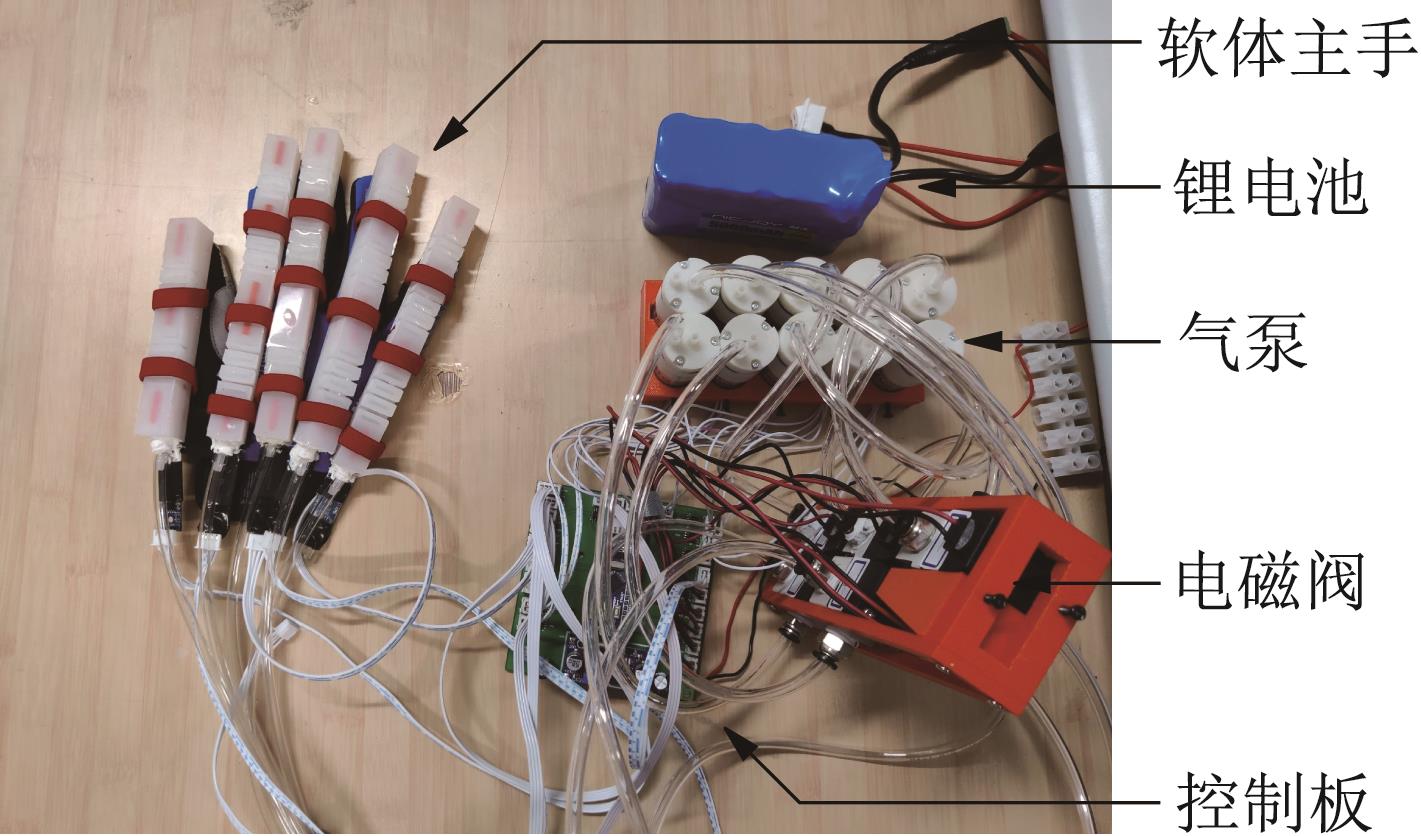
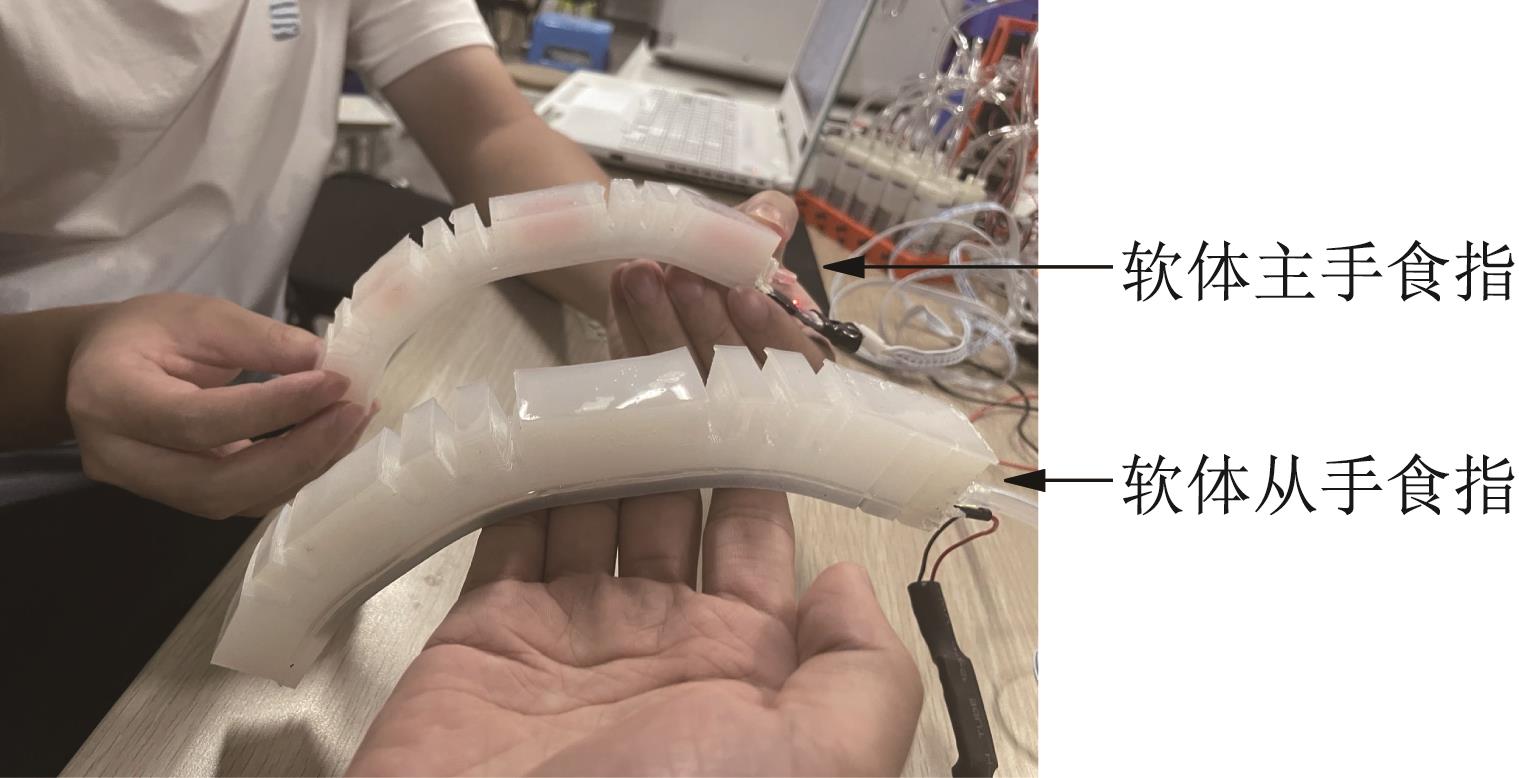
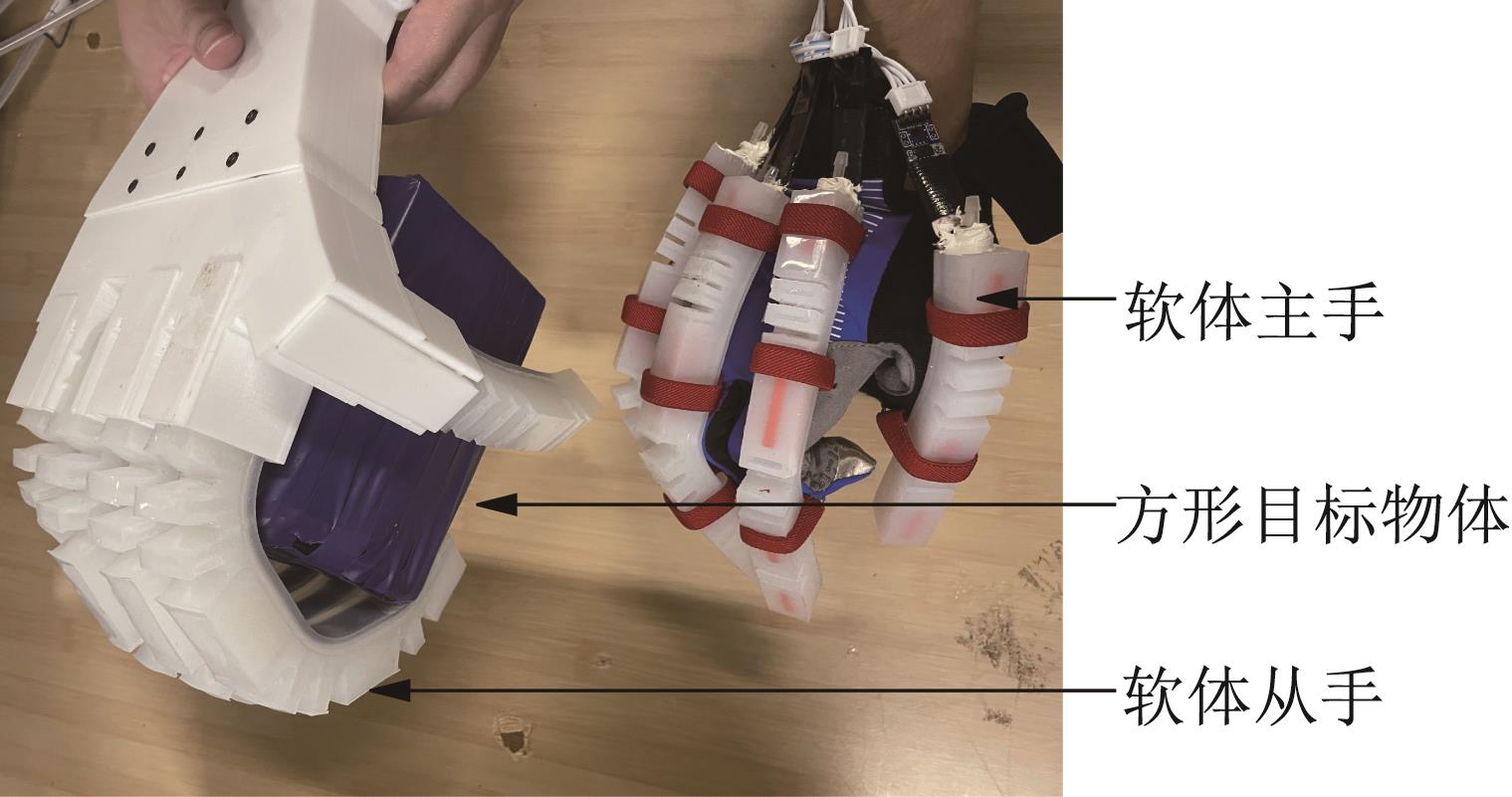
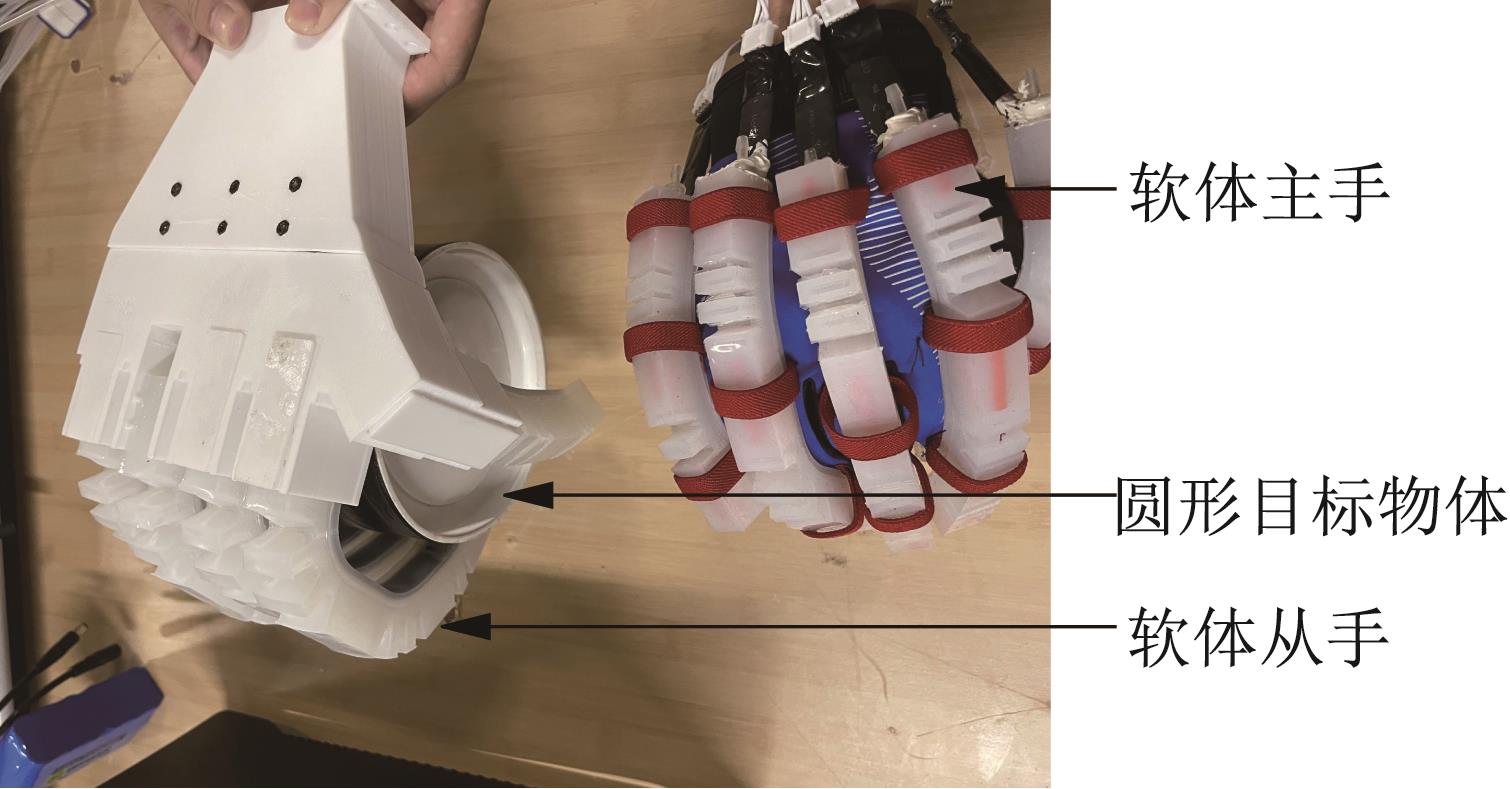
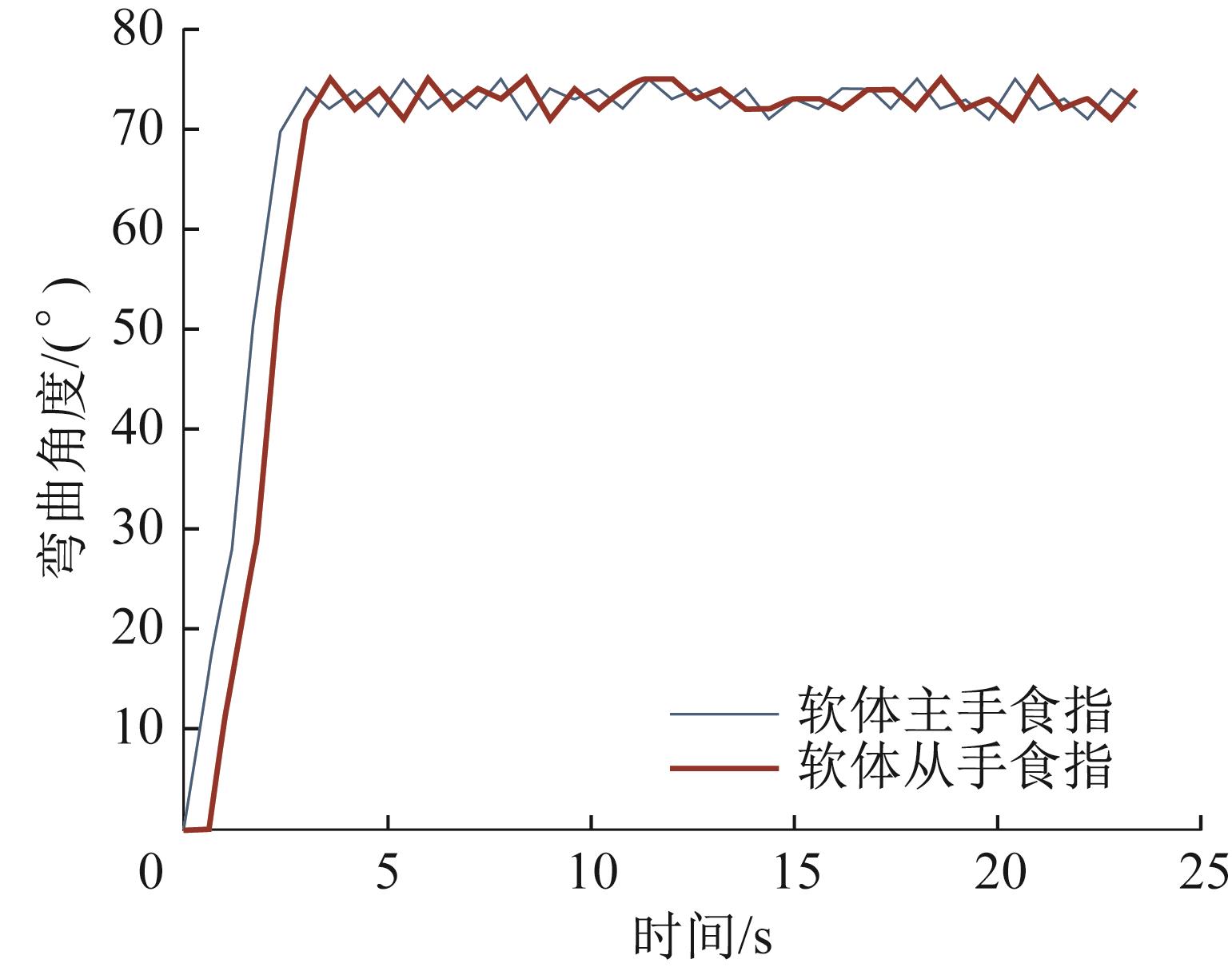
针对遥操作机器人在深海等未知环境中抓取软体物体或易碎物体的工作需求,提出了一种人机交互遥操作机器人的主从软体手位置跟踪方法。首先,介绍了主从软体手控制系统的构成与工作原理,该系统主要包括主端控制回路、通信链路和从端控制回路,用于控制软体手的抓取动作。然后,阐述了软体手指的建模过程与控制器设计,采用假设模态法进行建模,并在软体手指的位置跟踪控制中引入模型预测控制算法,以解决软体从手跟踪软体主手性能差的问题。最后,设计并研制了软体主手、软体从手及其控制系统,其中软体从手以硅胶为原料并嵌入固体材料来增大刚度,同时开展了软体从手跟踪软体主手抓握目标物体的实验。仿真结果表明,所设计的模型预测控制器能有效解决软体手指因模型失配而引起的控制精度下降问题;实验结果表明,所研制的软体从手能有效跟踪软体主手并实现目标物体的抓握,整个控制系统运行良好。研究结果为人机交互遥操作机器人软体手的跟踪控制应用提供了参考。
关键词:
遥操作机器人,
软体手,
位置跟踪,
模型预测控制算法