经支气管诊疗机器人设计及其柔性末端执行器位姿研究
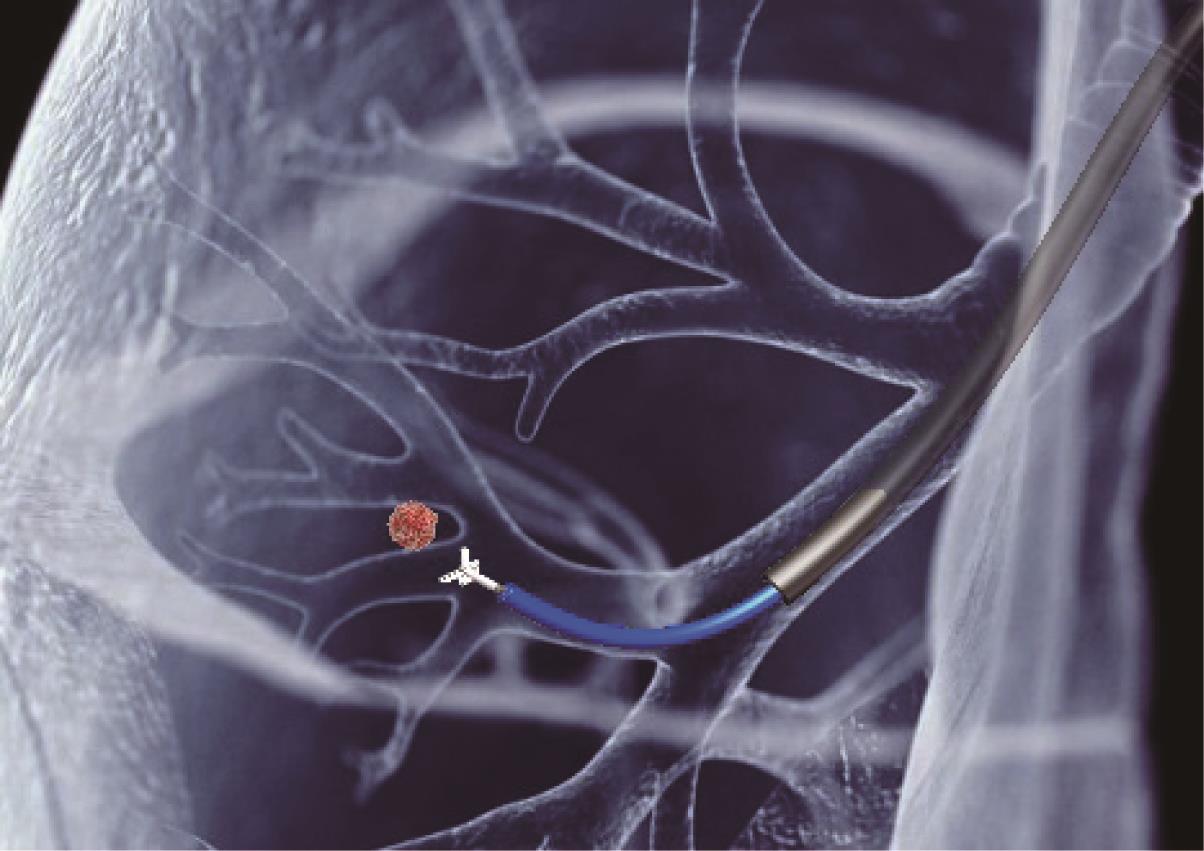
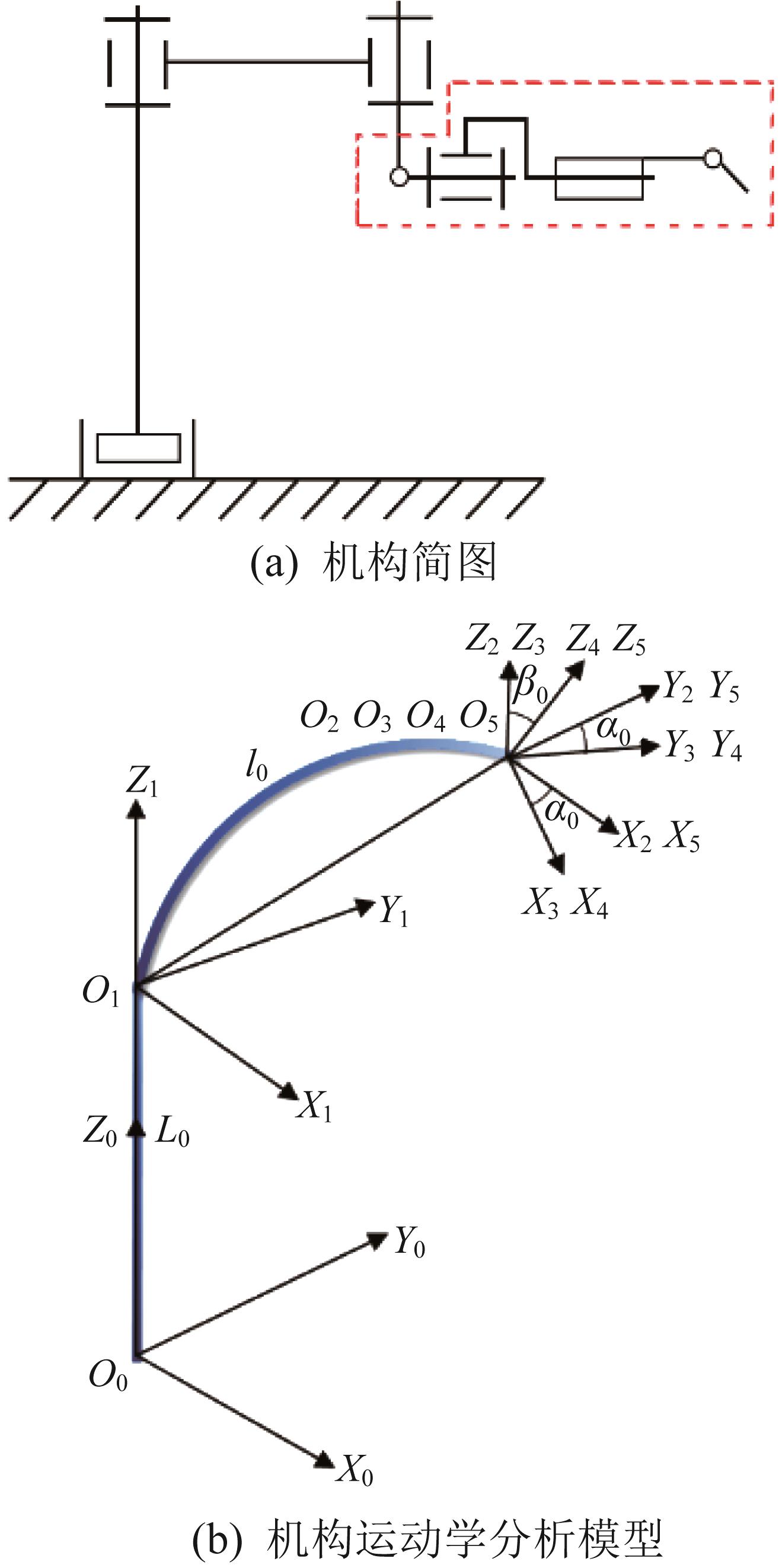
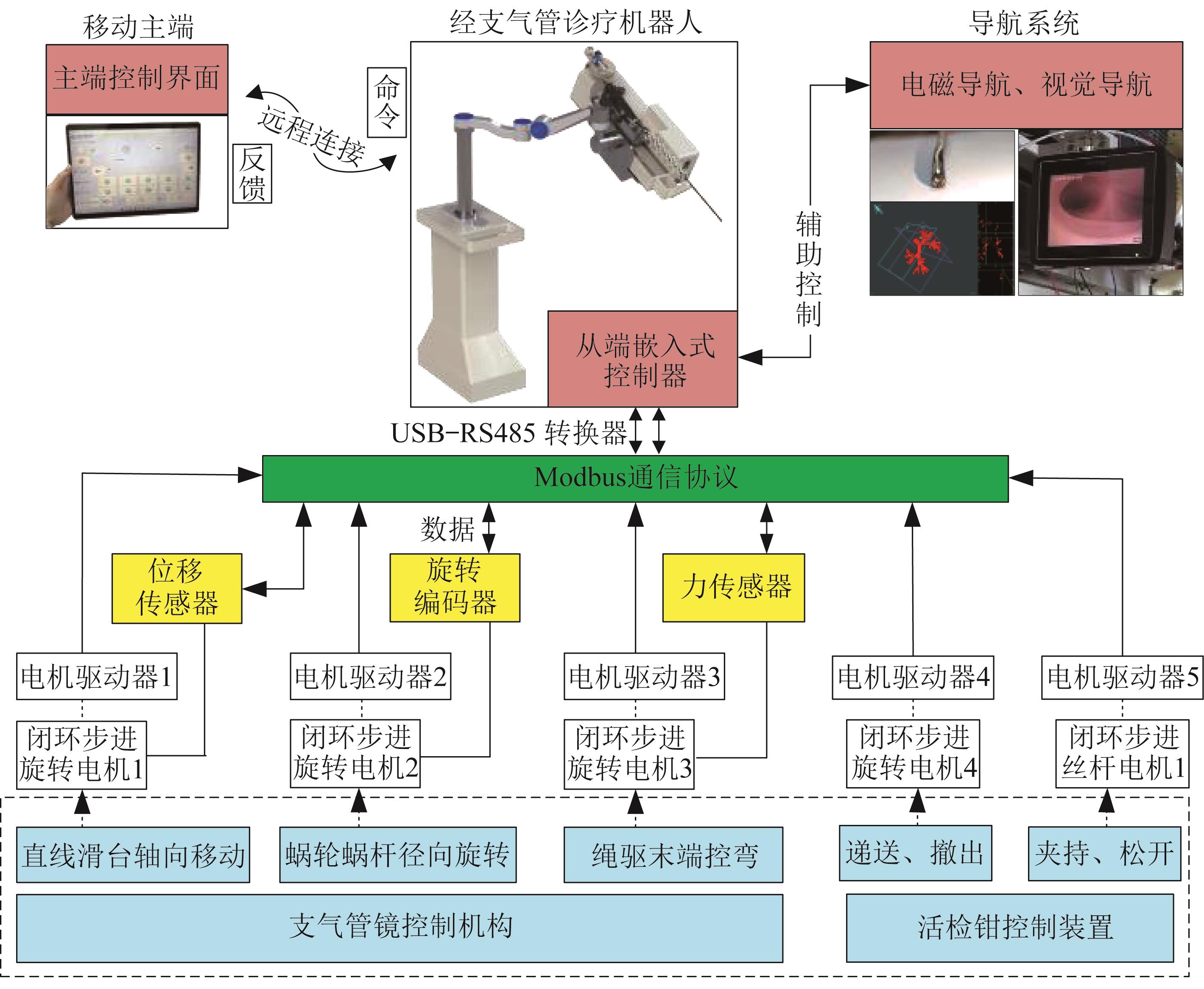
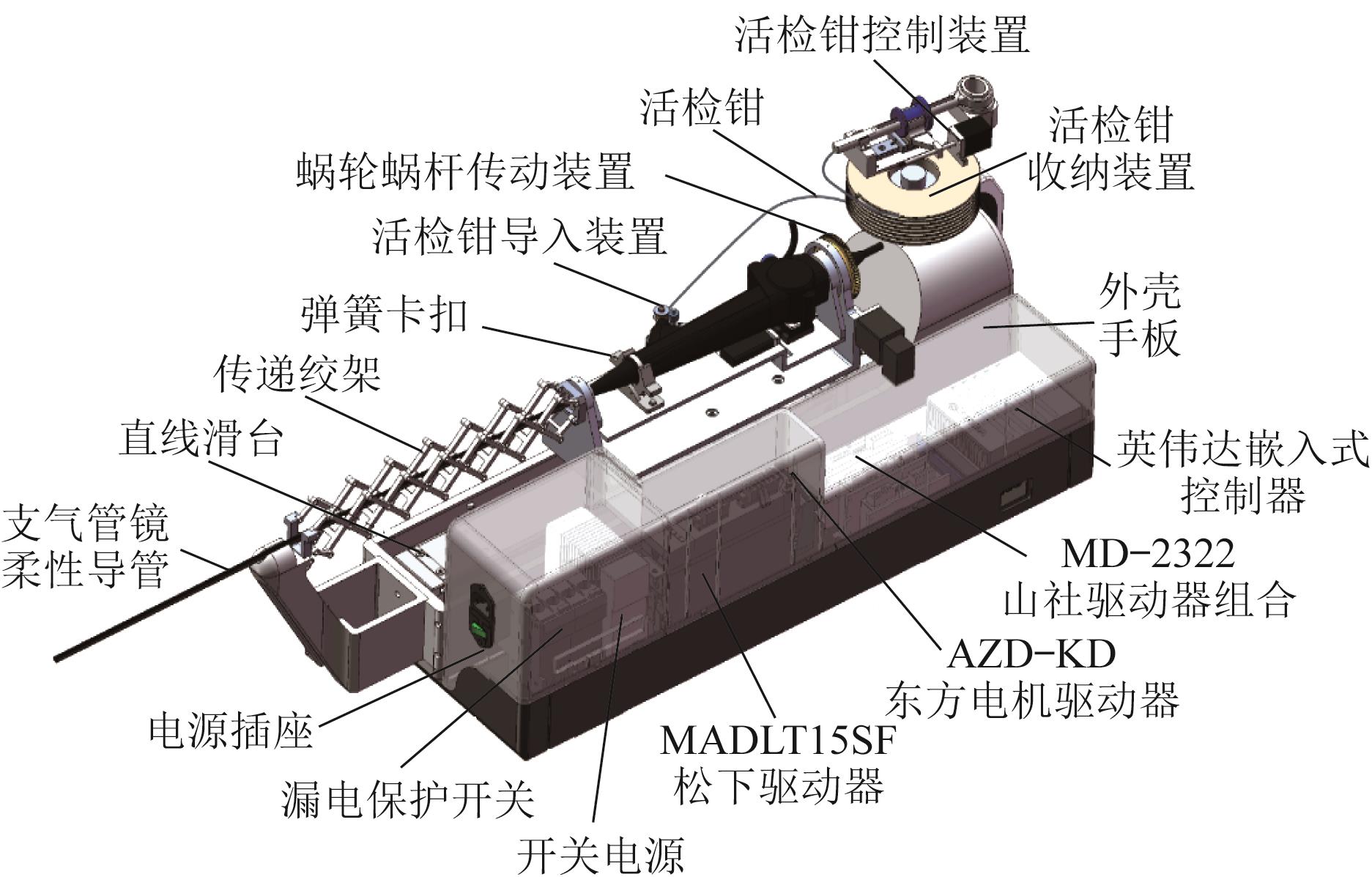
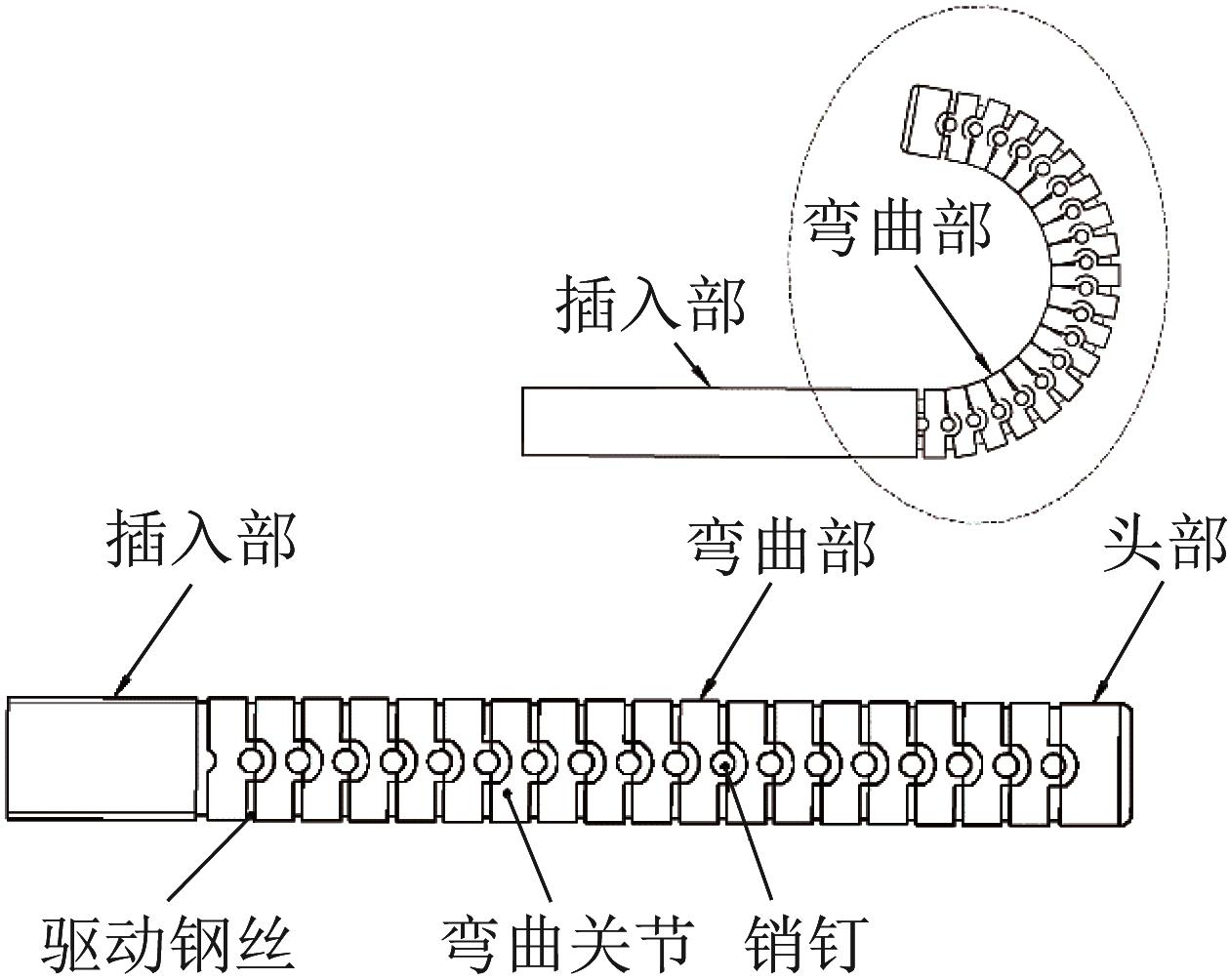
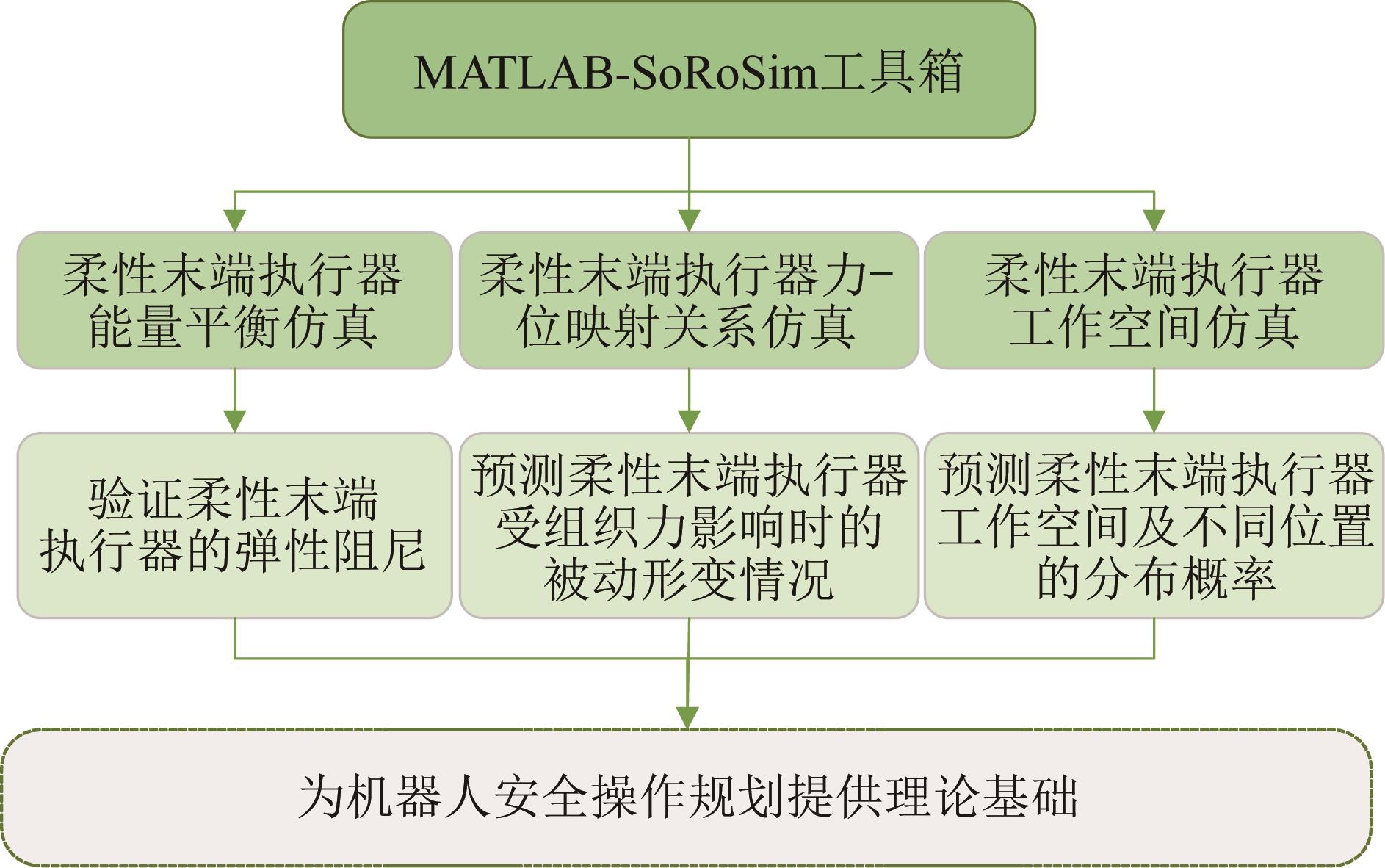
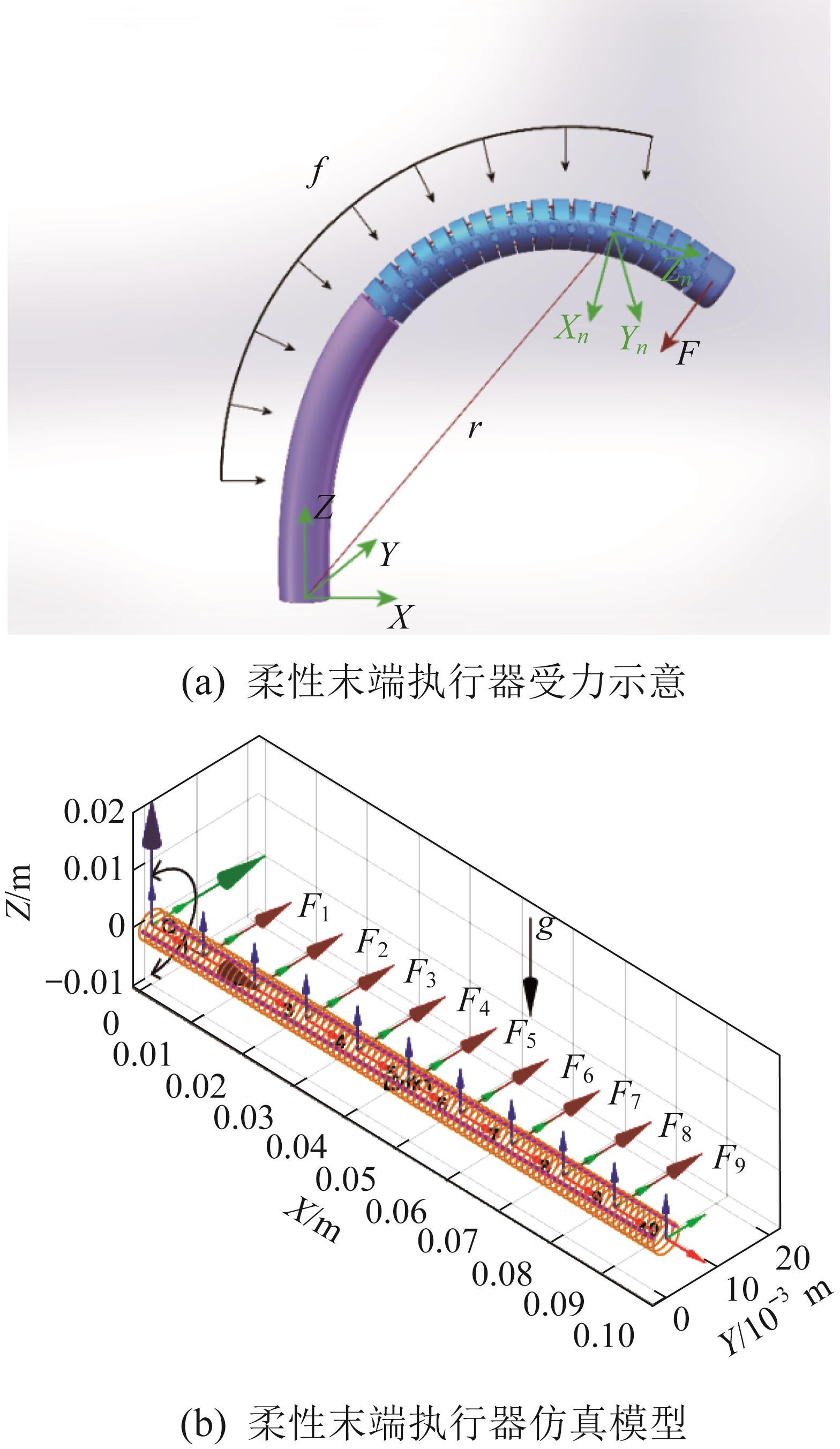
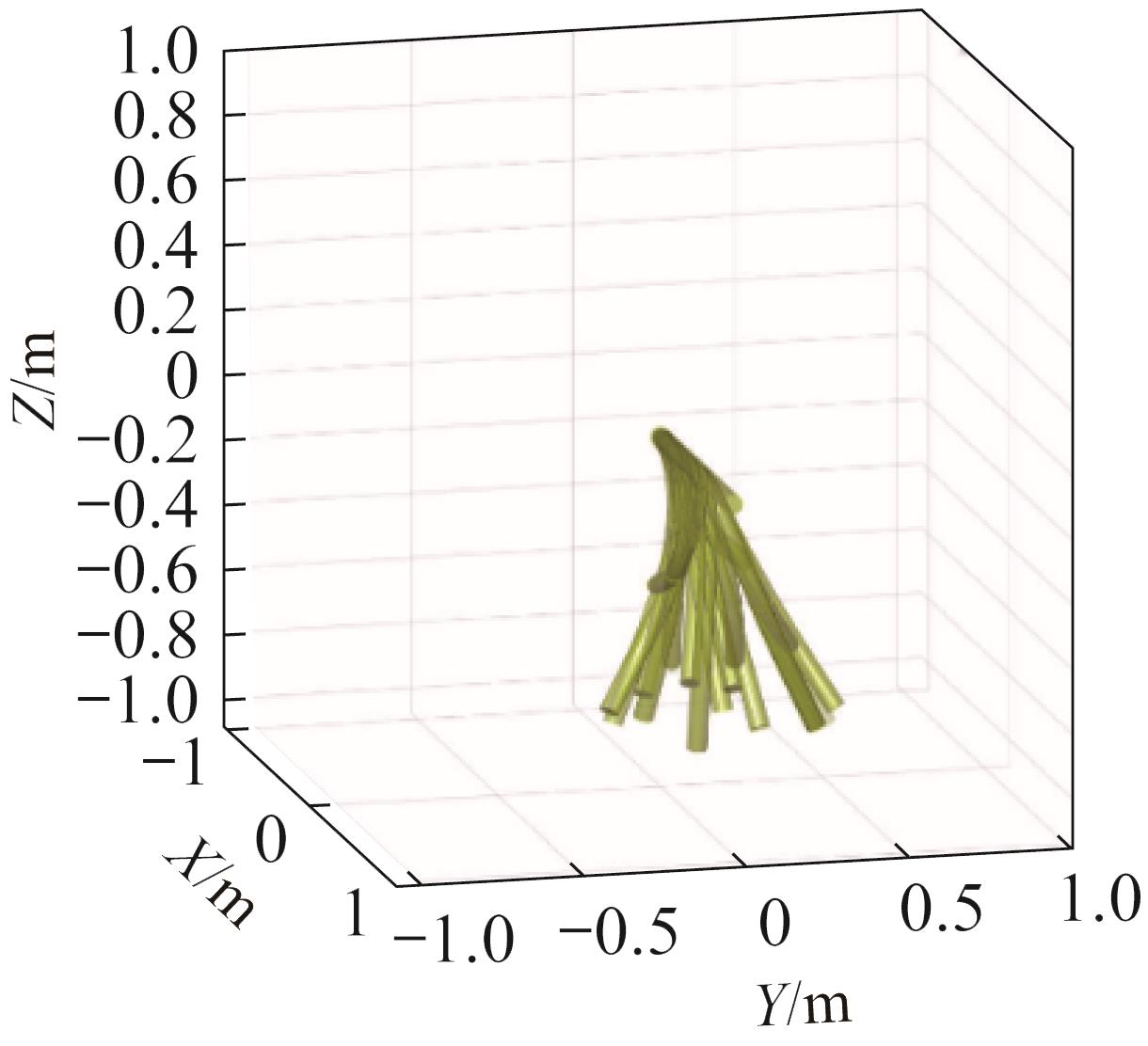
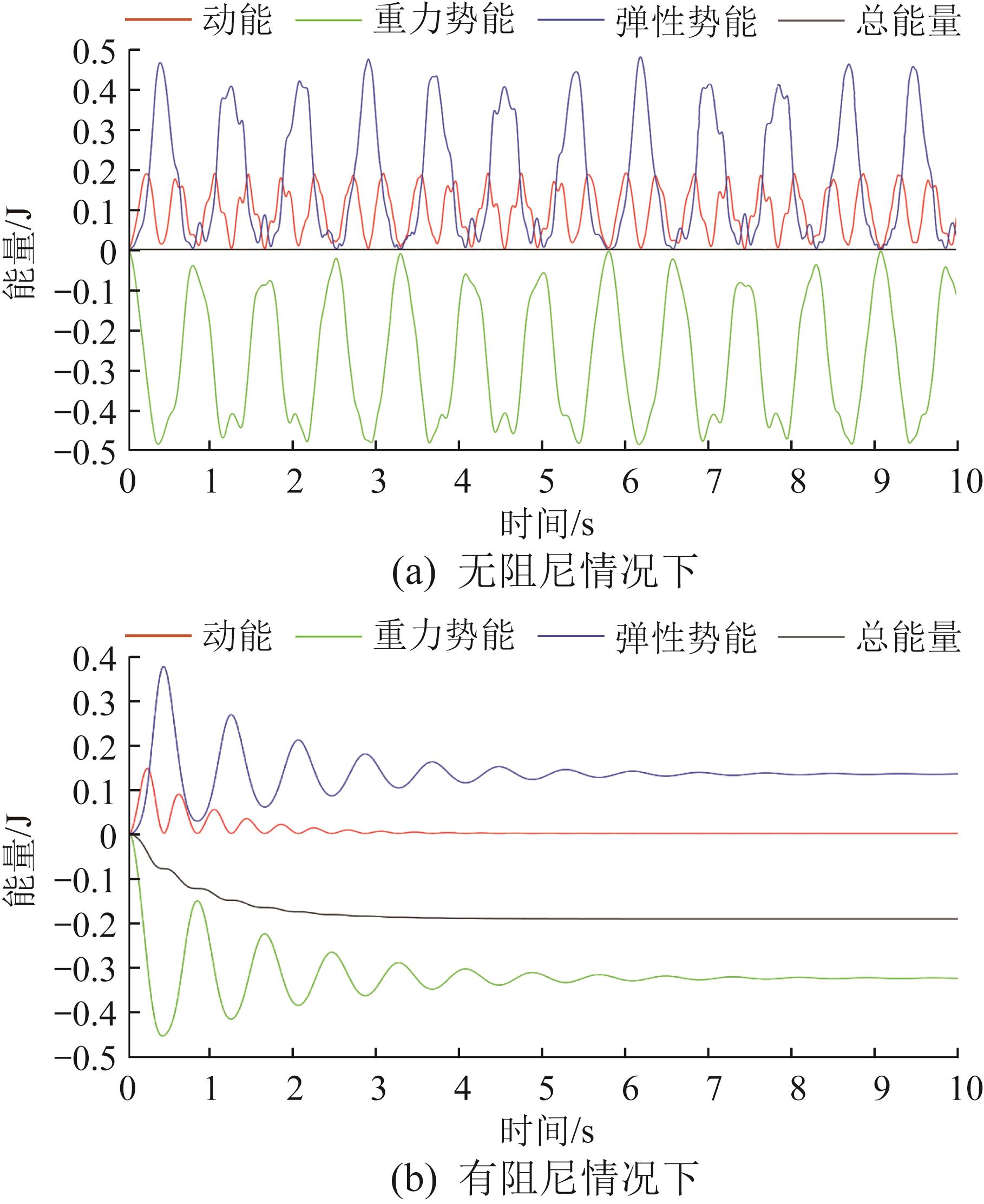
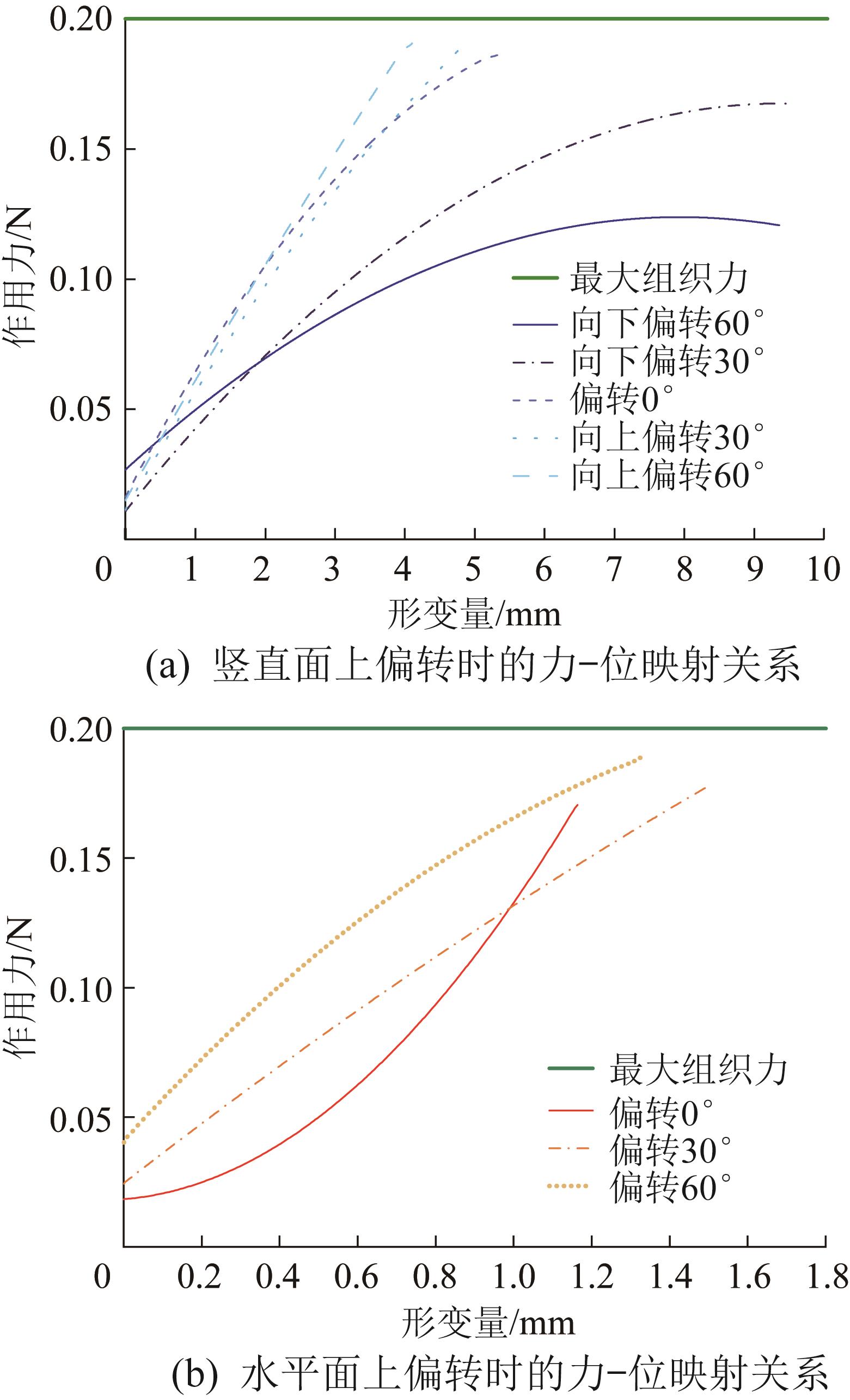
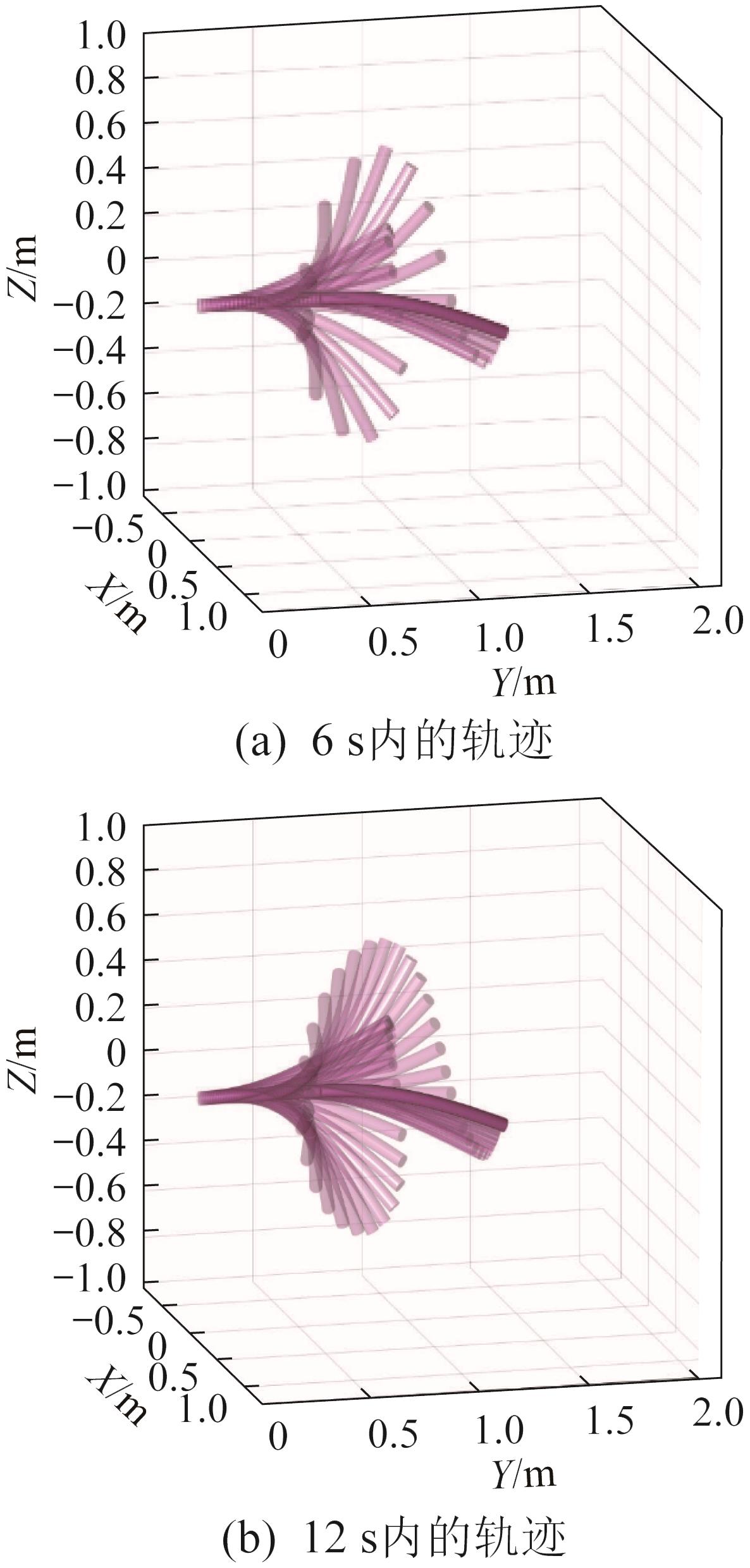
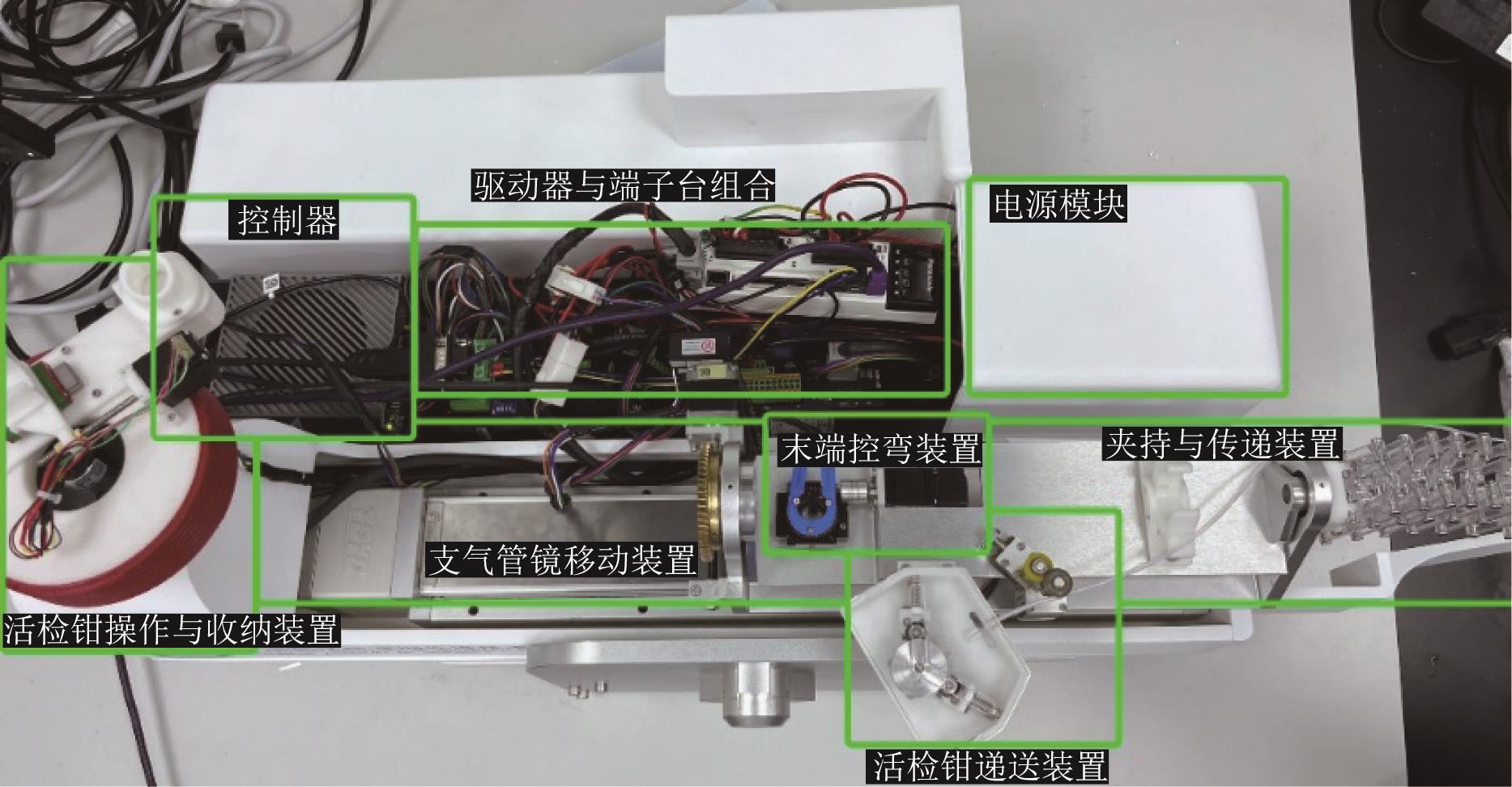
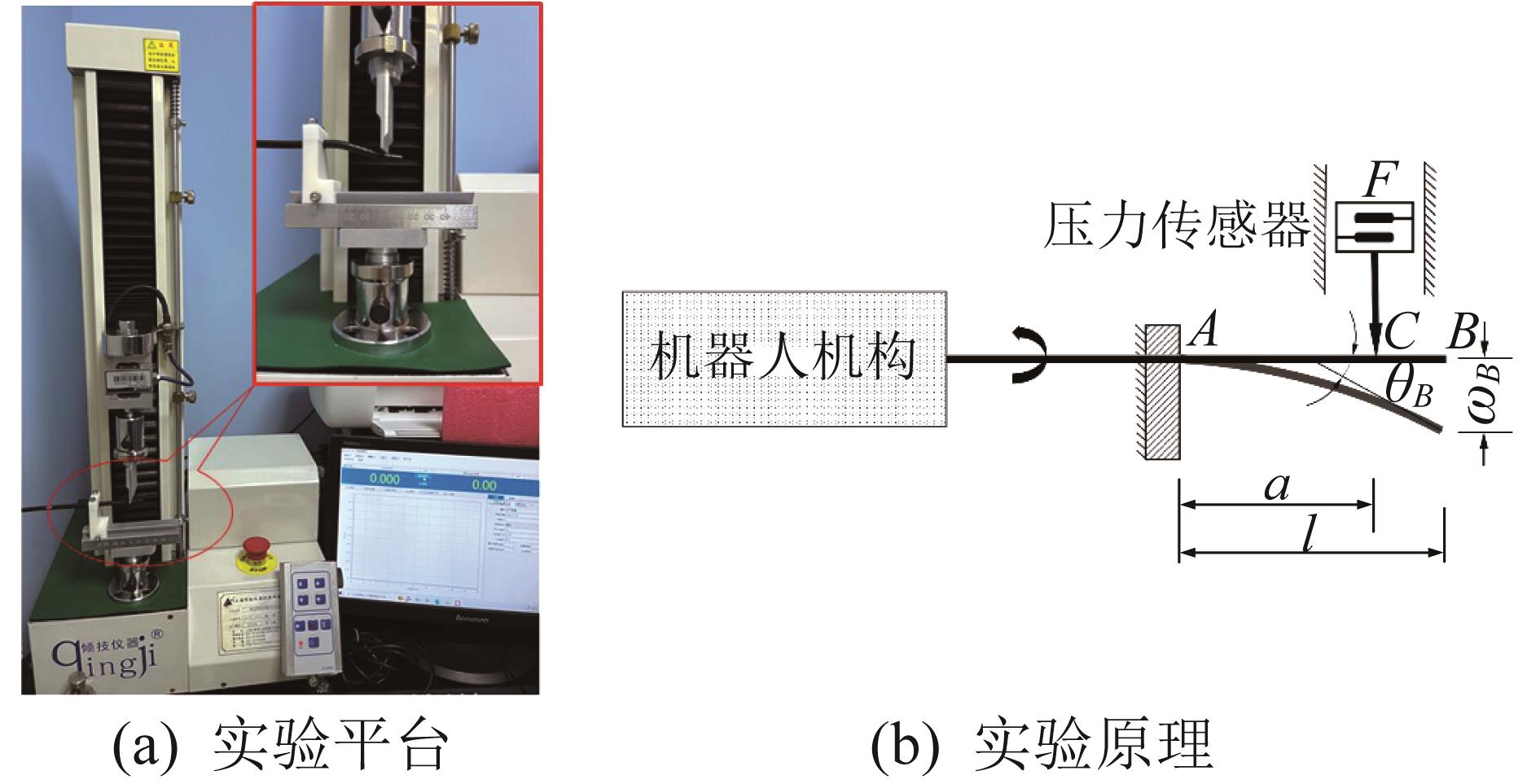
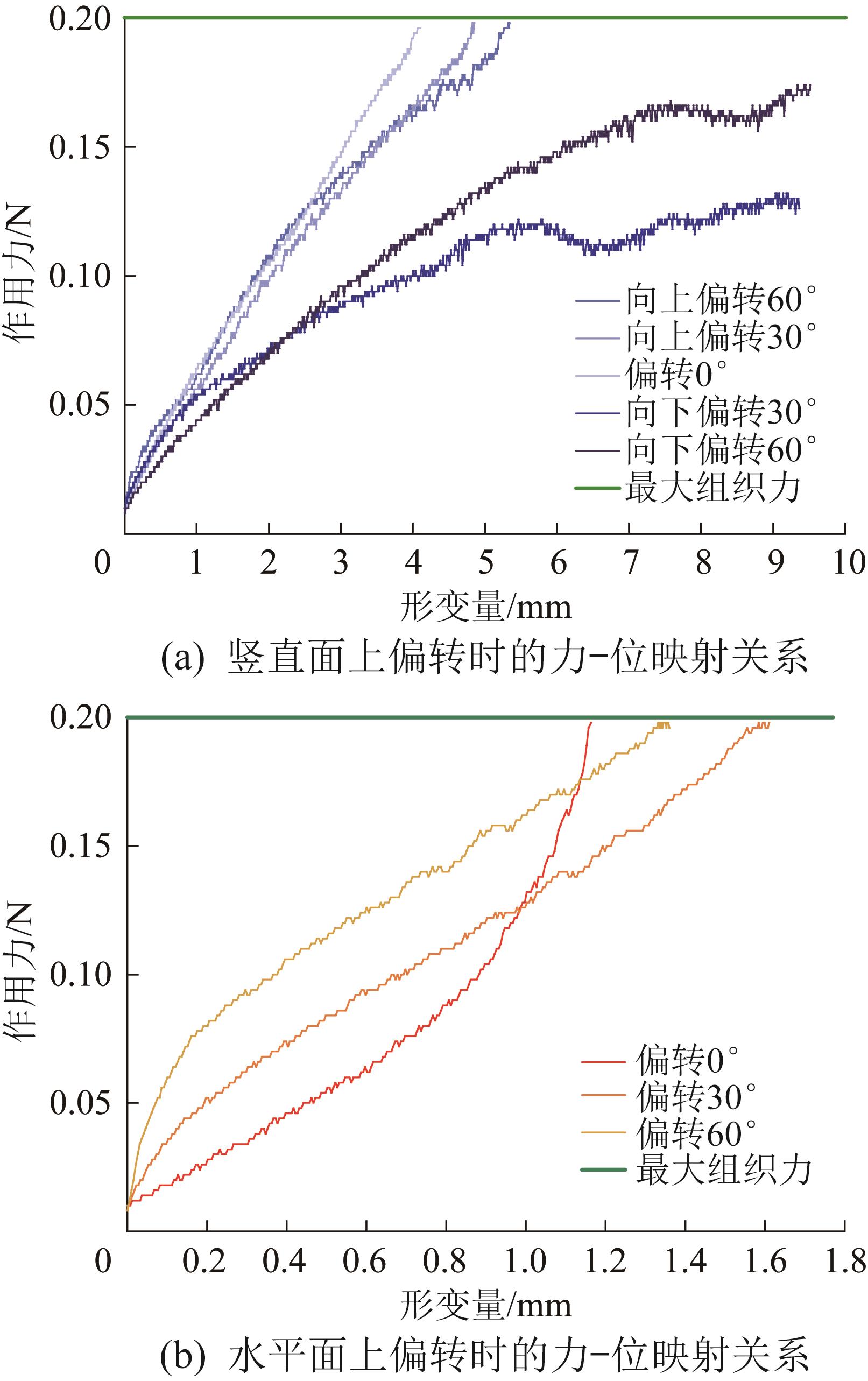
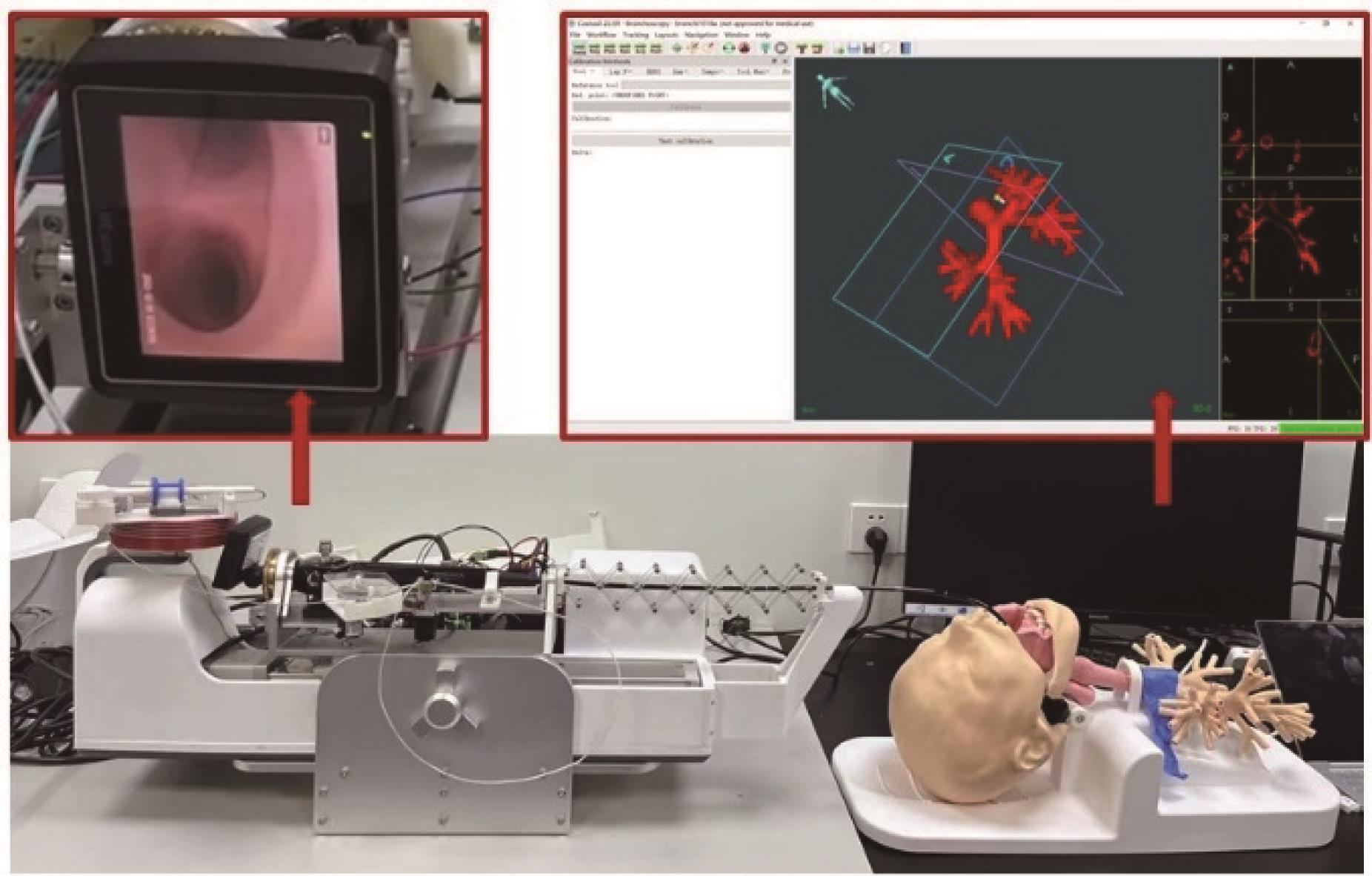
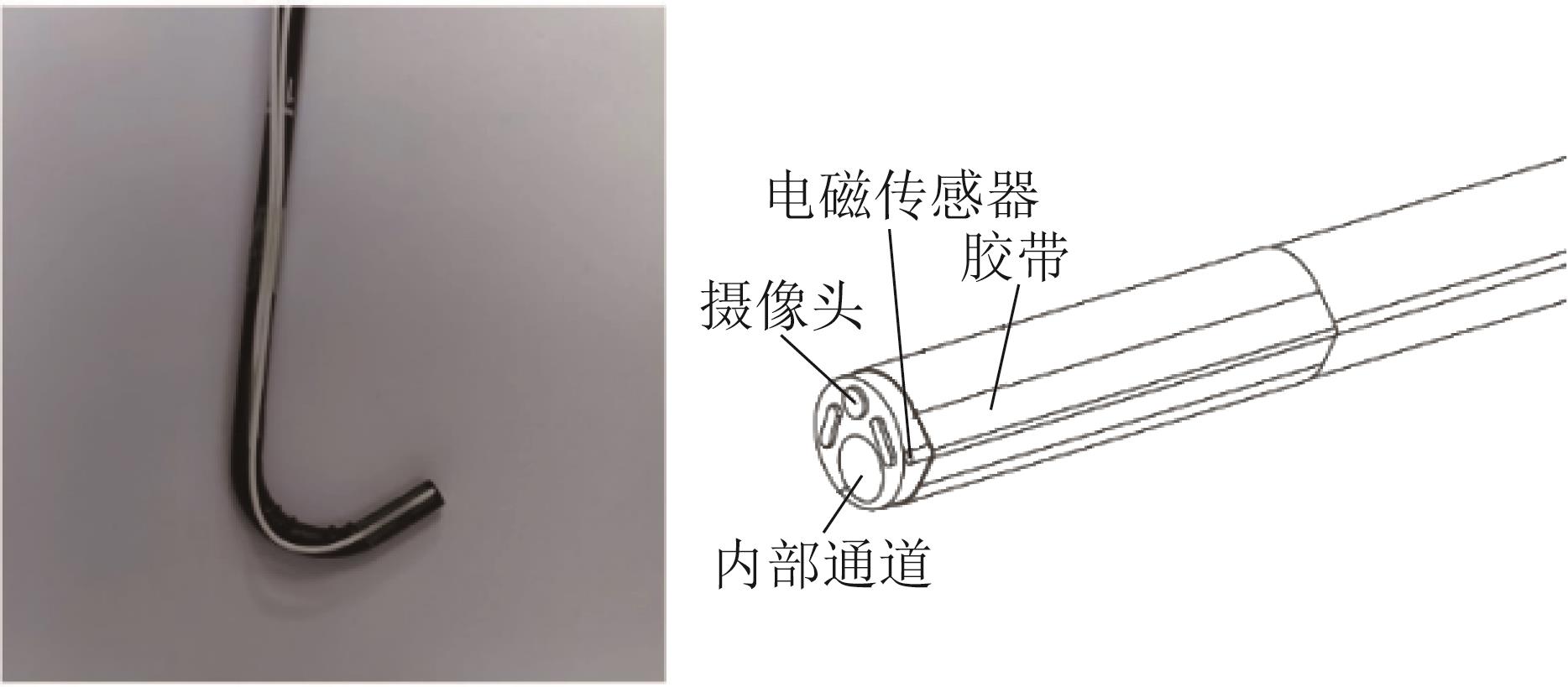
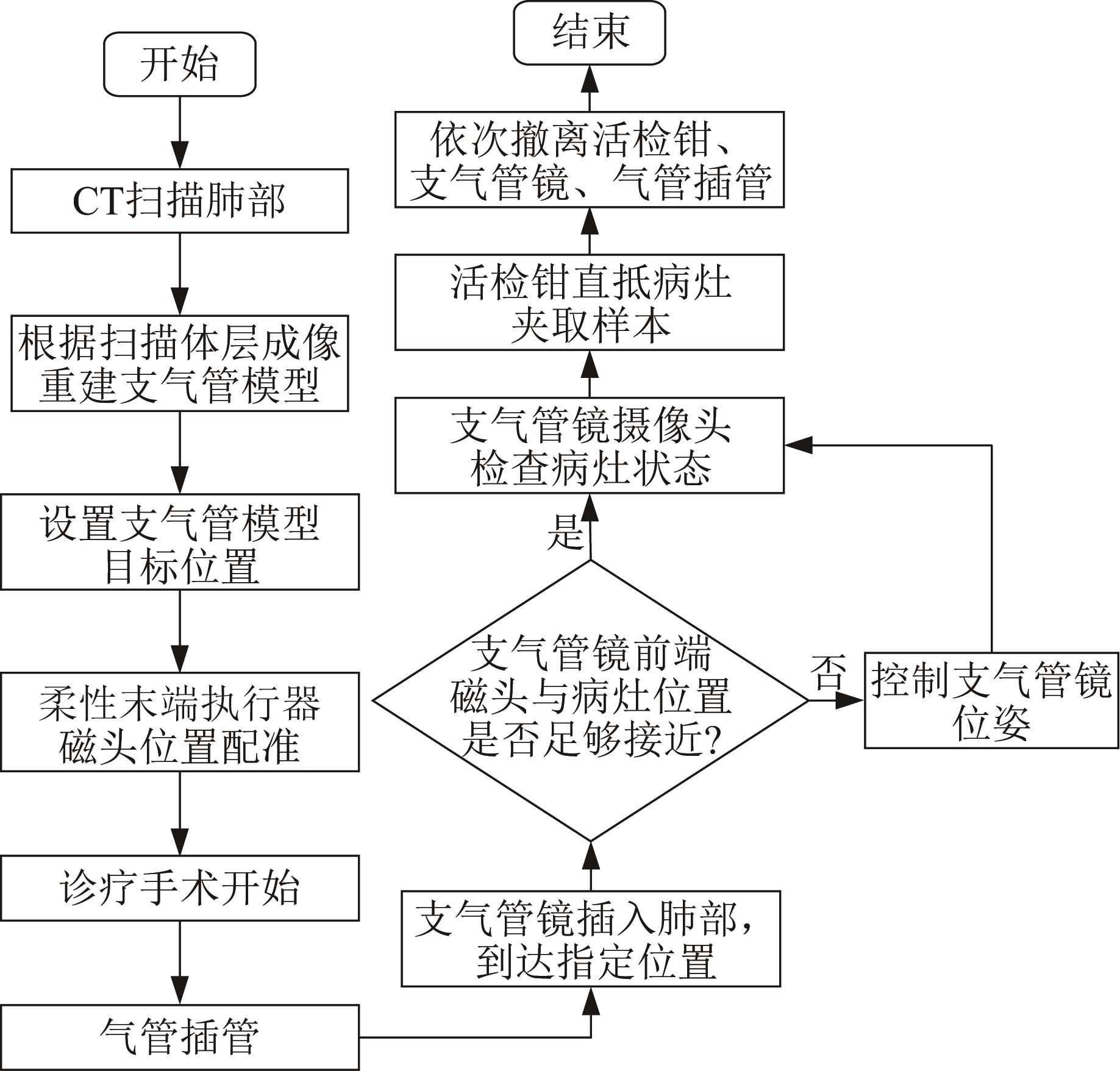
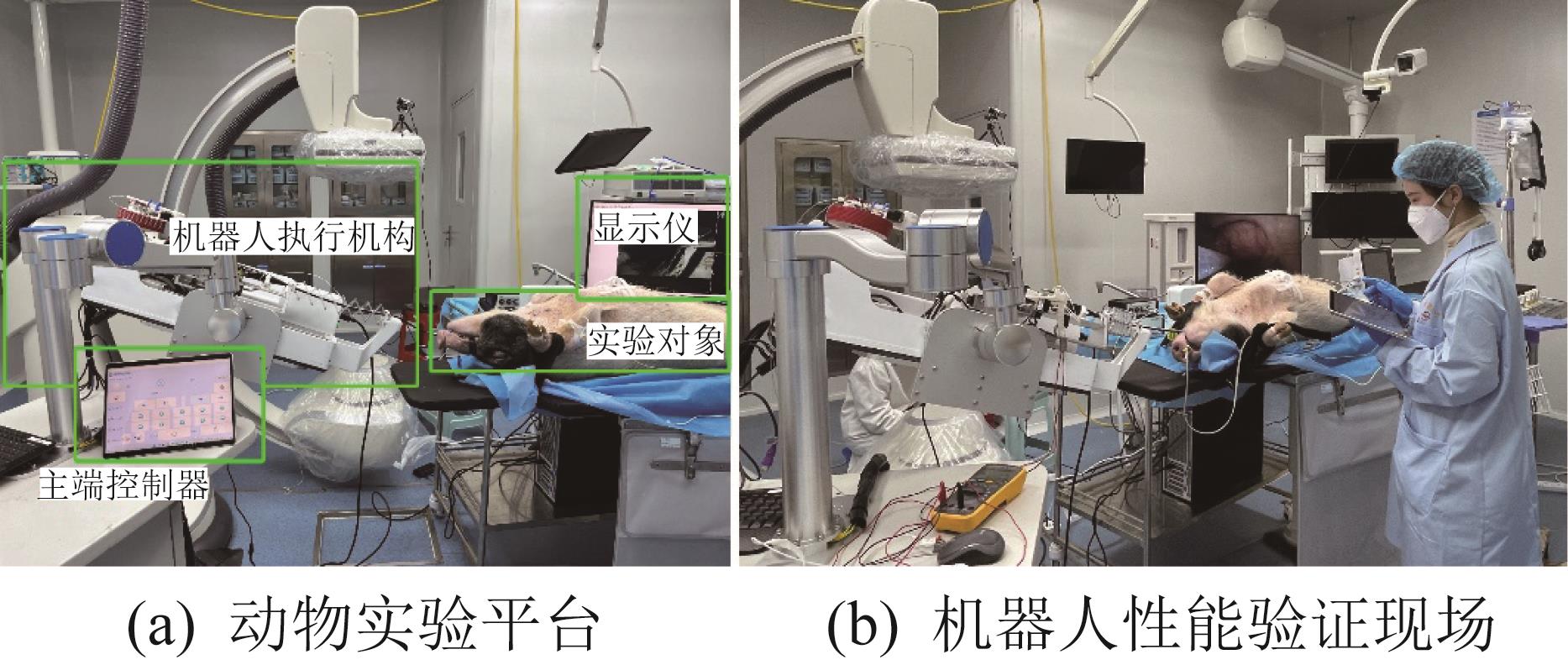
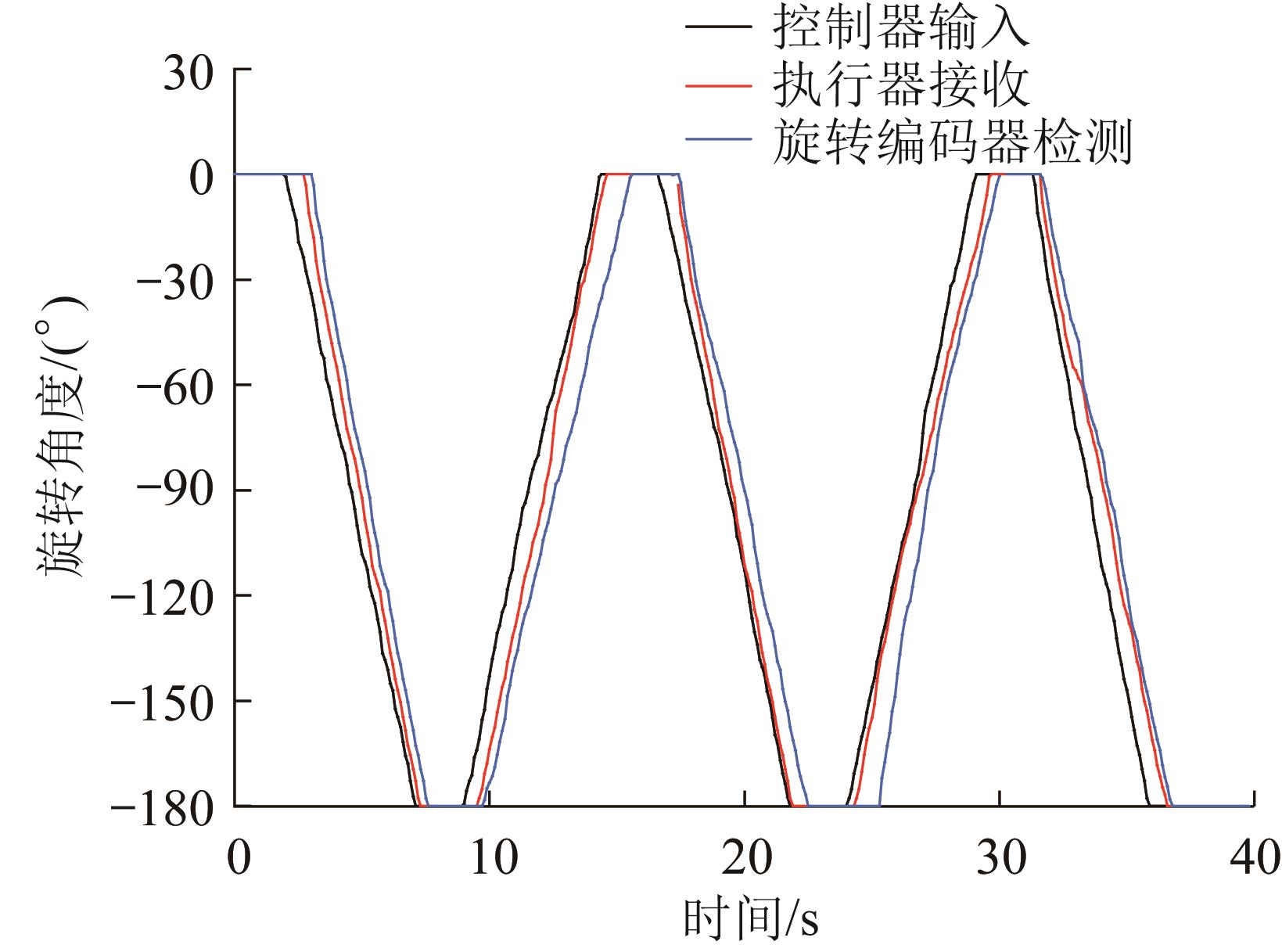
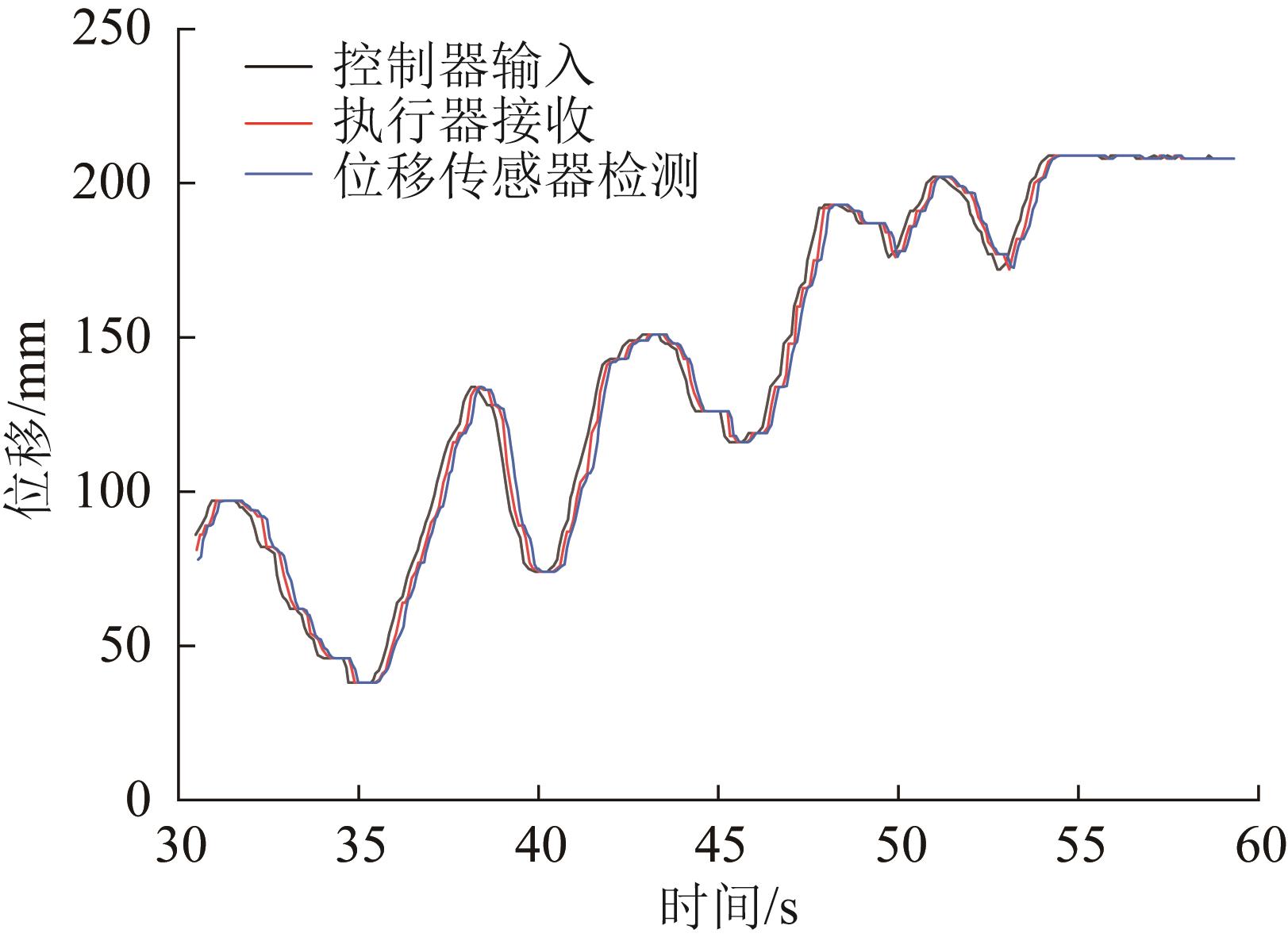
经呼吸道活检是肺结节诊断中较为常见的手术,但由于呼吸道疾病存在传染风险以及手动操作时关节受限等,医工结合的诊疗方式逐渐成为发展趋势。为实现柔性体在支气管腔道内复杂弯曲动态环境下灵活运动、精准定位与稳定介入,采用主从协同式远程控制机器人机构设计,模拟传统手术中医生的操作习惯,设计并搭建能够操控支气管镜、活检钳的集成机构原理样机,以实现经支气管进行微创诊疗的双器械协同操控。然后,基于Cosserat杆理论,利用MATLAB软件对机器人柔性末端执行器的力-位映射关系、位姿和工作空间进行仿真求解,并通过实验分析机器人柔性末端执行器在经支气管的远程微创活检手术中的真实位姿以及机器人的实际运行效果,验证了仿真结果的准确性。研究结果可为经自然腔道活检术的多器械协同控制提供理论基础。
关键词:
双器械协同,
Cosserat杆理论,
力-位映射关系,
位姿分析,
微创活检