| Robotic and Mechanism Design |
|

|
|
|
| Design and performance analysis of lower limb rehabilitation exoskeleton robot |
Jiachen CHANG( ),Yali HAN(),Han SUN,Chuanqi SHI,Tian ZHAO ),Yali HAN(),Han SUN,Chuanqi SHI,Tian ZHAO |
| School of Mechanical Engineering, Nanjing Institute of Technology, Nanjing 211167, China |
|
|
|
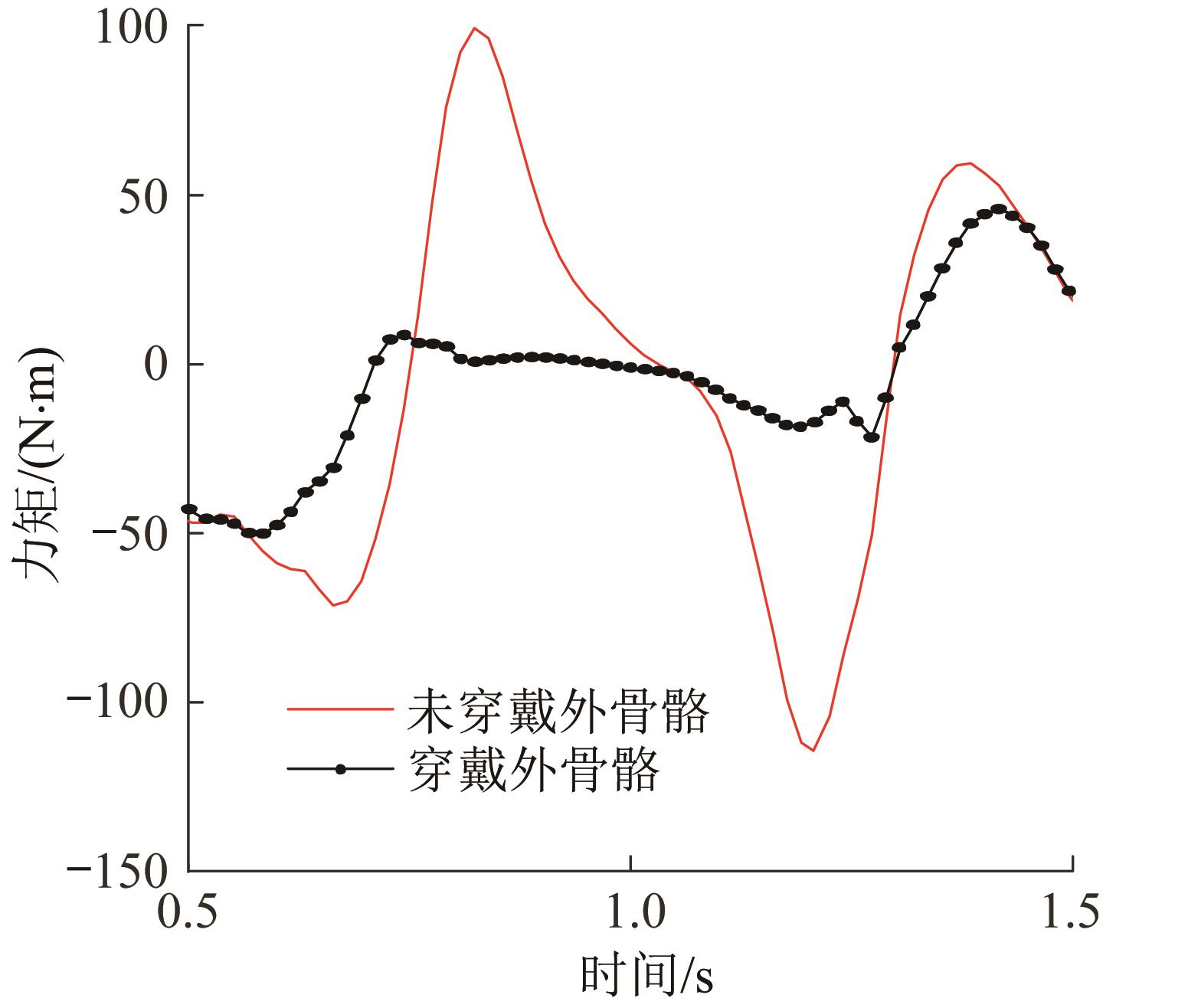
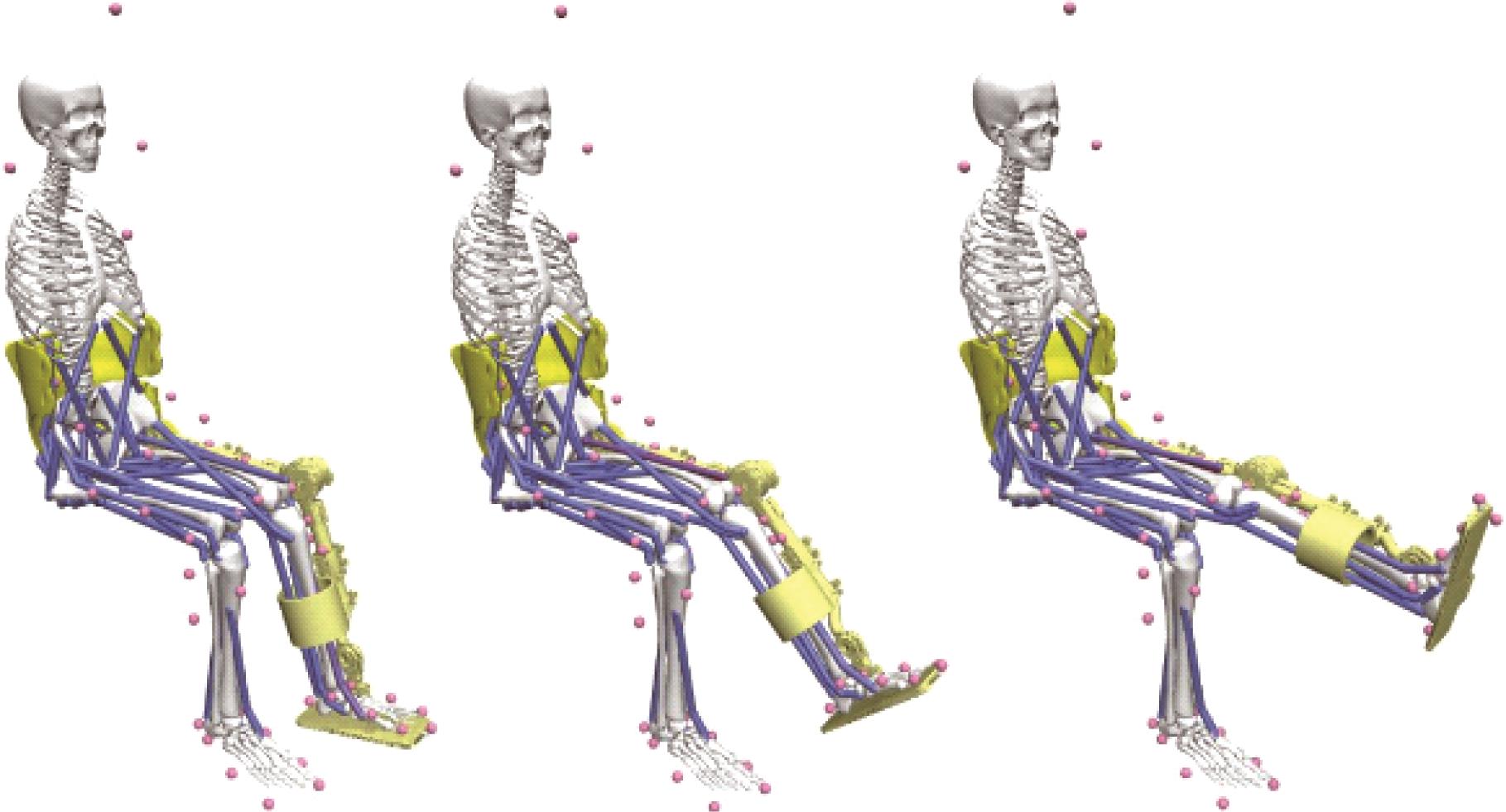
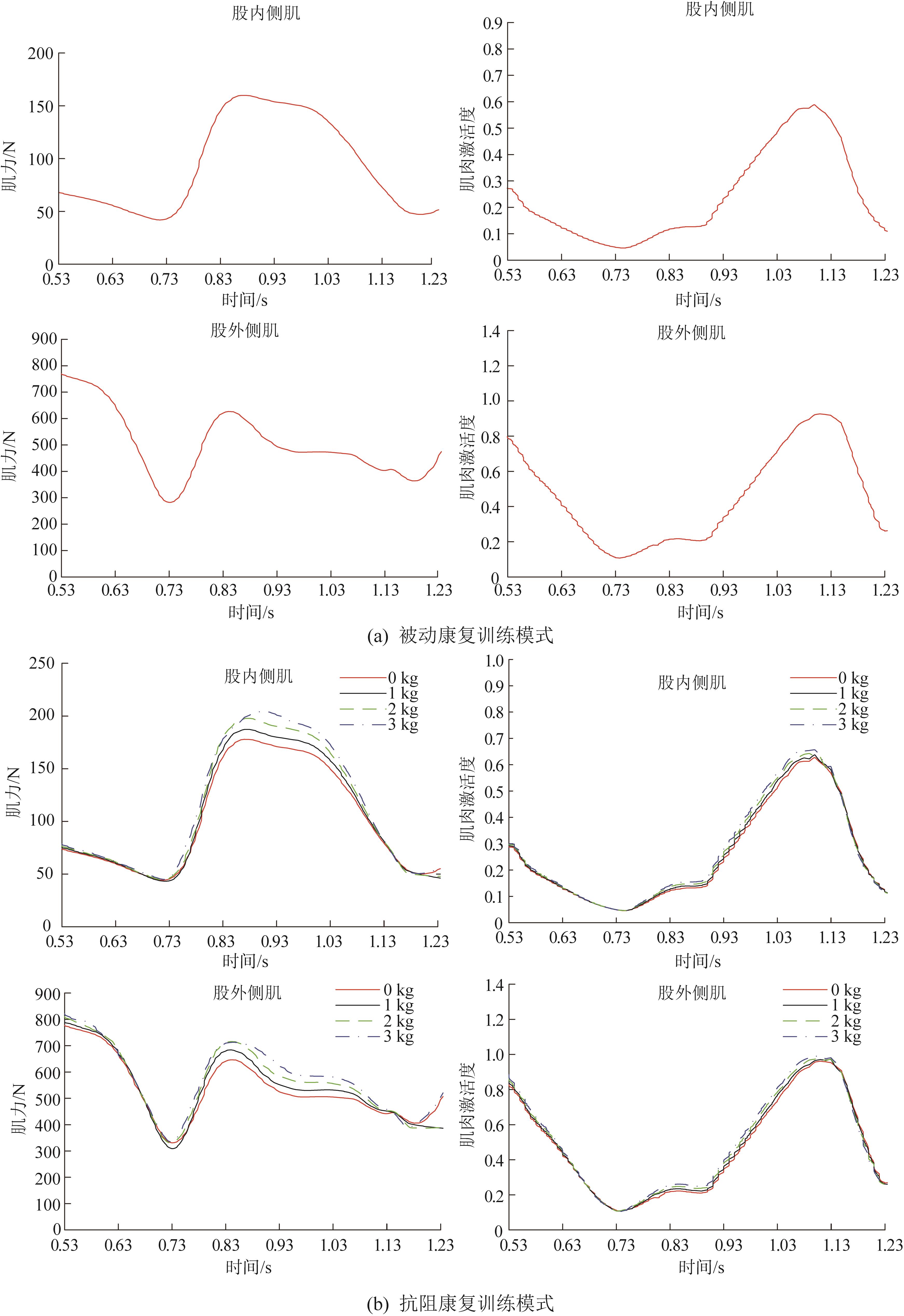
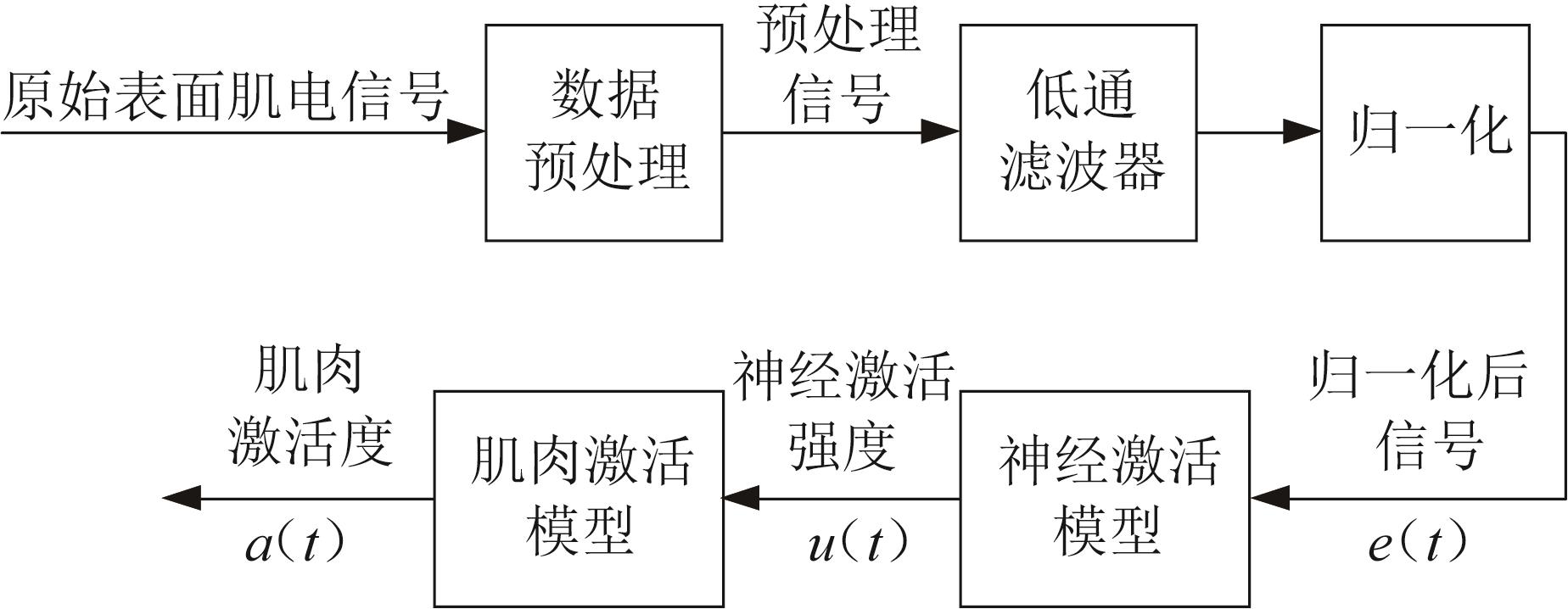
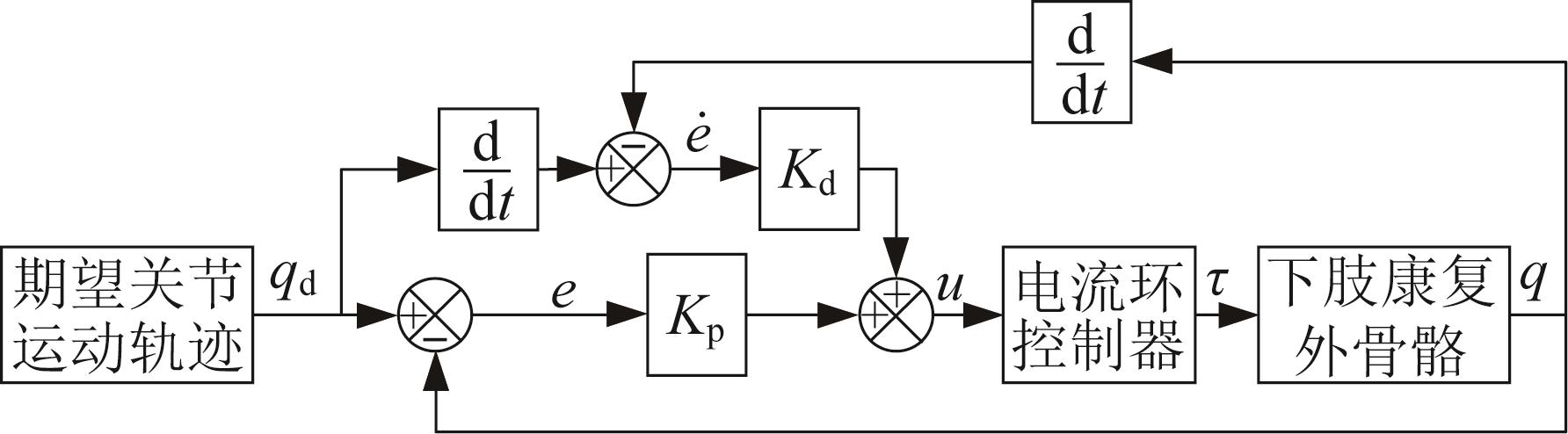
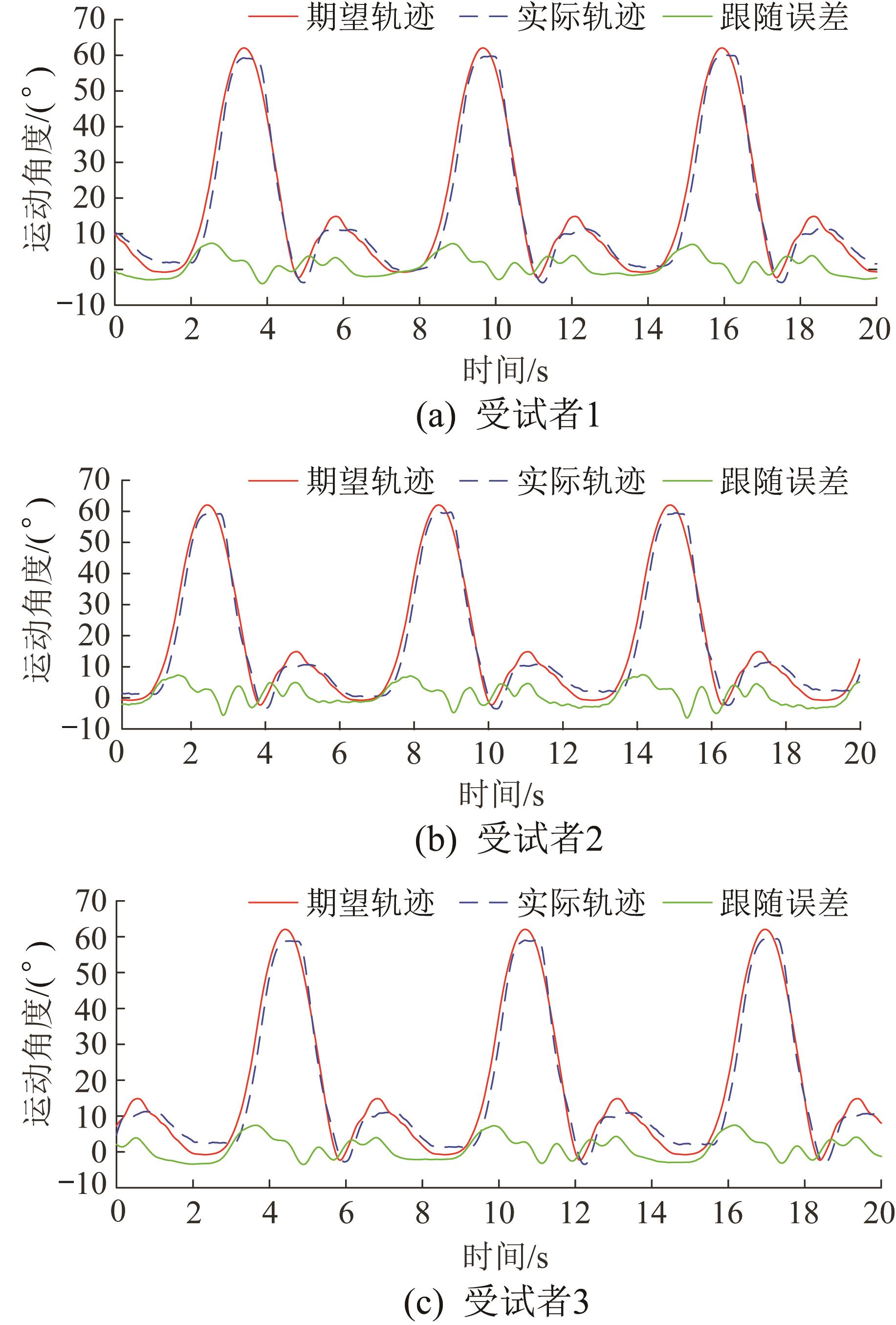
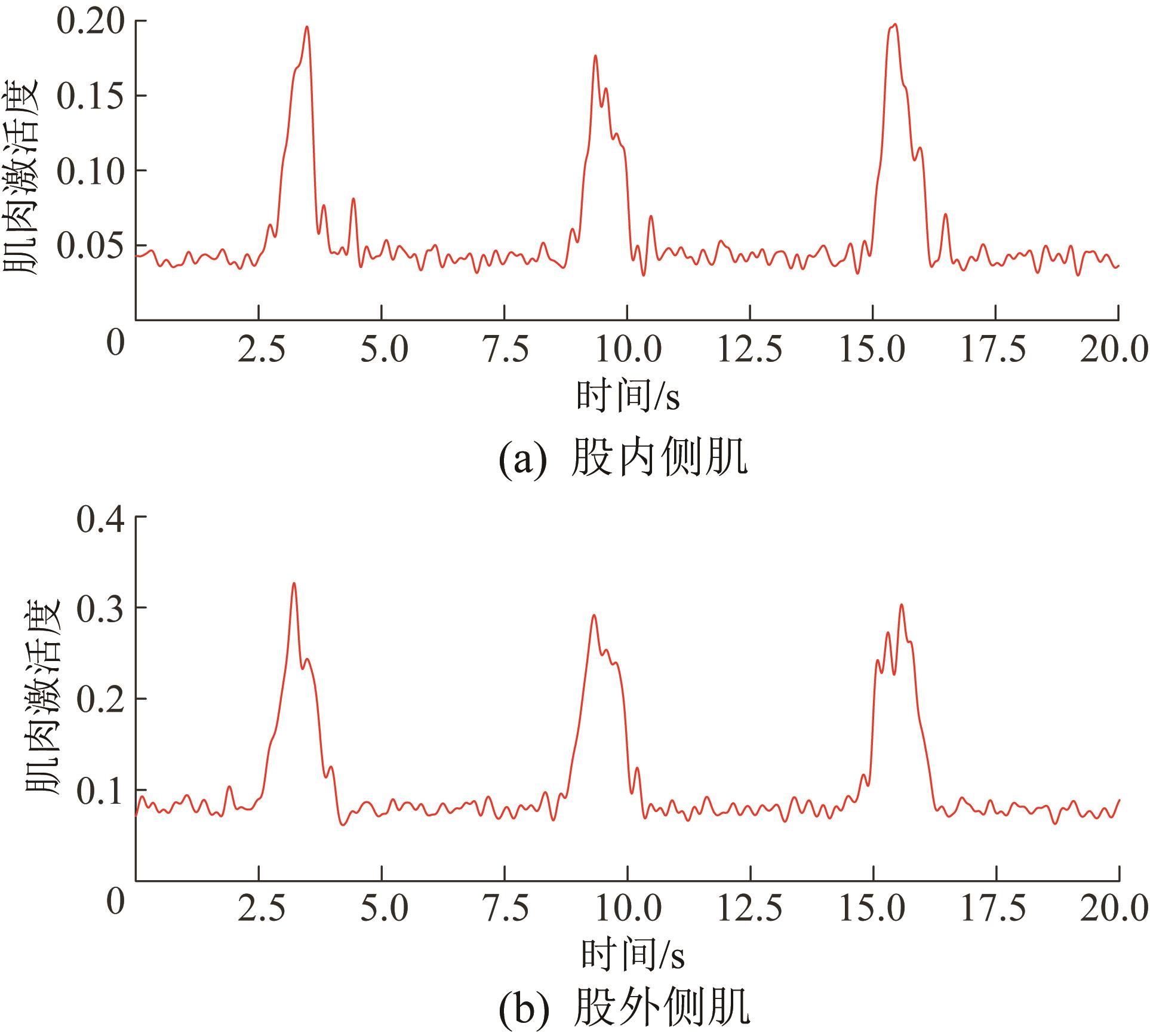
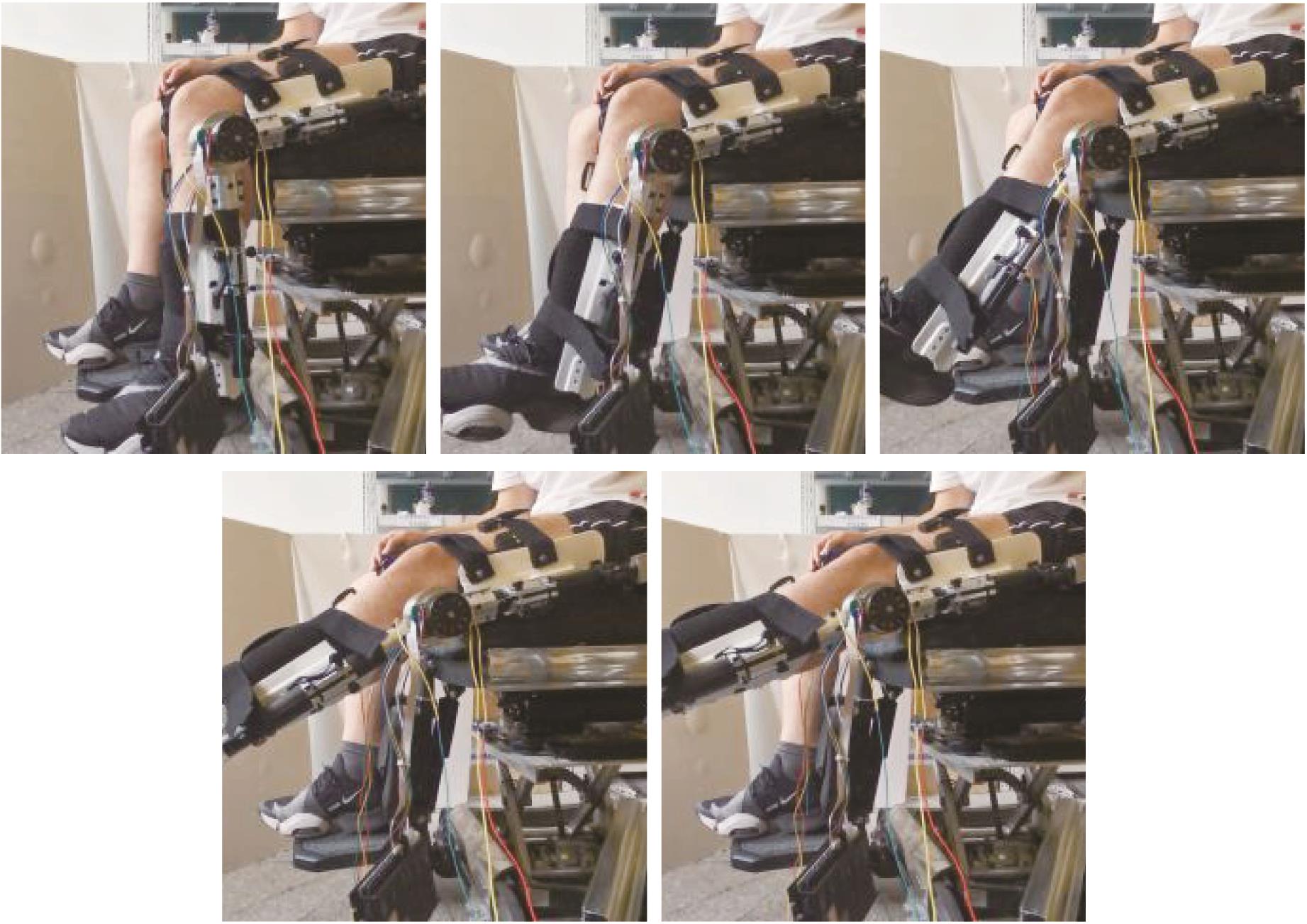
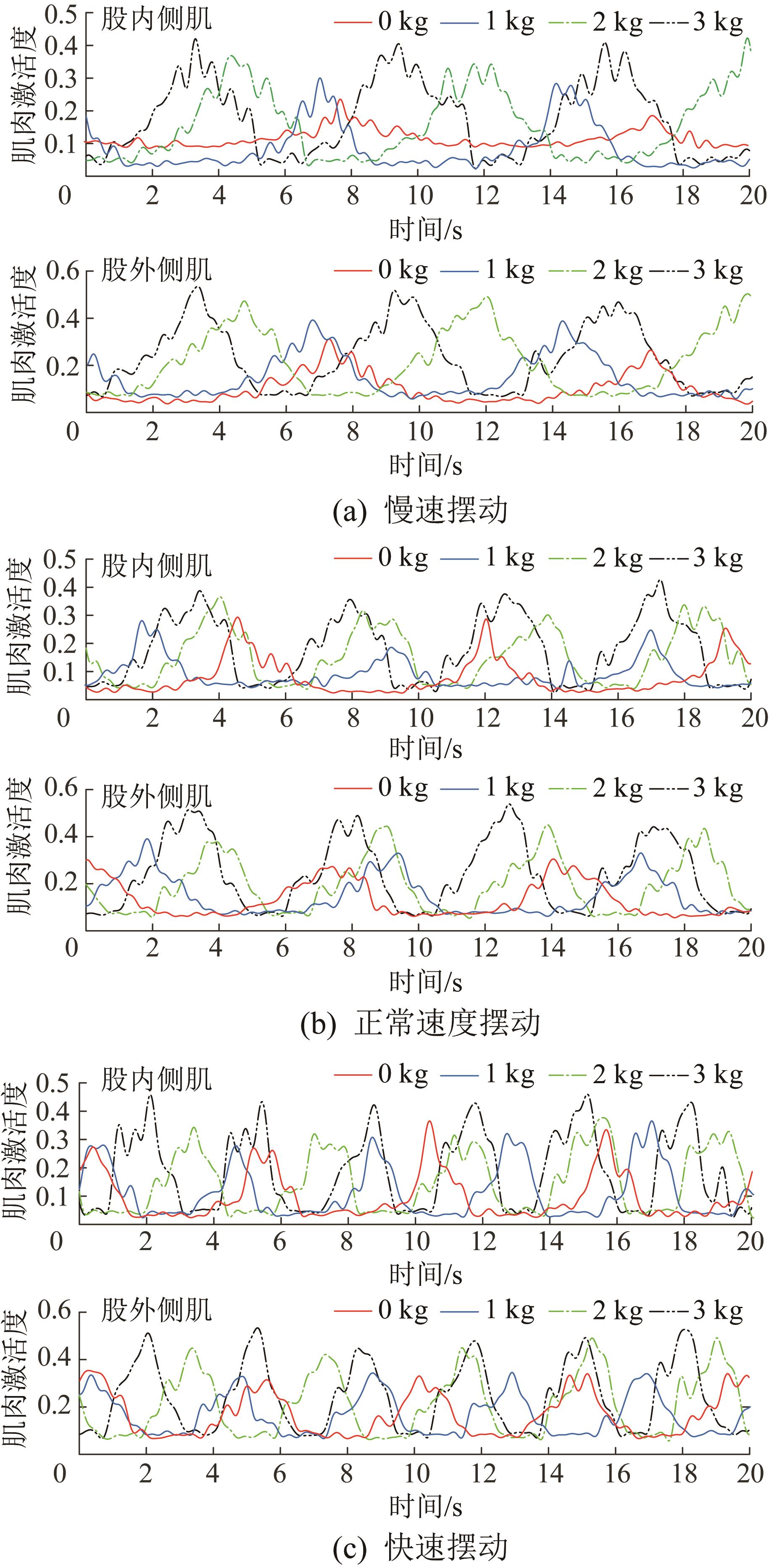
Abstract In order to better assist the rehabilitation training for hemiplegic patients, a lower limb rehabilitation exoskeleton robot driven by disk motor is designed, and the effectiveness of its different rehabilitation training modes is verified through visualization research of power-assisted effect and performance analysis. Firstly, the detailed structural design for the lower limb rehabilitation exoskeleton robot was performed, and the biomechanical analysis of human-machine coupling was carried out by using OpenSim software. Then, the passive rehabilitation training experiment based on position tracking control and resistance rehabilitation training experiment were carried out, and the surface electromyographic signals were collected to verify the effectiveness of the designed lower limb rehabilitation exoskeleton robot to assist patients in rehabilitation training under different modes. The results showed that wearing lower limb rehabilitation exoskeleton robot could reduce the human knee joint torque by about 50%. In the passive rehabilitation training experiment, the following error was within -4°-8°, and the muscle activation of the target muscle group of human lower limbs showed an obvious periodic change. In the resistance rehabilitation training experiment, the muscle activation of the target muscle group of human lower limbs increased with the increase of weight. The designed lower limb rehabilitation exoskeleton robot has good sensitivity and followability, and its passive and resistance rehabilitation training modes are conducive to lower limb rehabilitation of hemiplegia patients, which has broad application prospect.
|
|
Received: 27 February 2023
Published: 26 April 2024
|
|
|
|
Corresponding Authors:
Yali HAN
E-mail: cjcjstx@163.com;s966237@163.com
|
下肢康复外骨骼机器人设计与性能分析
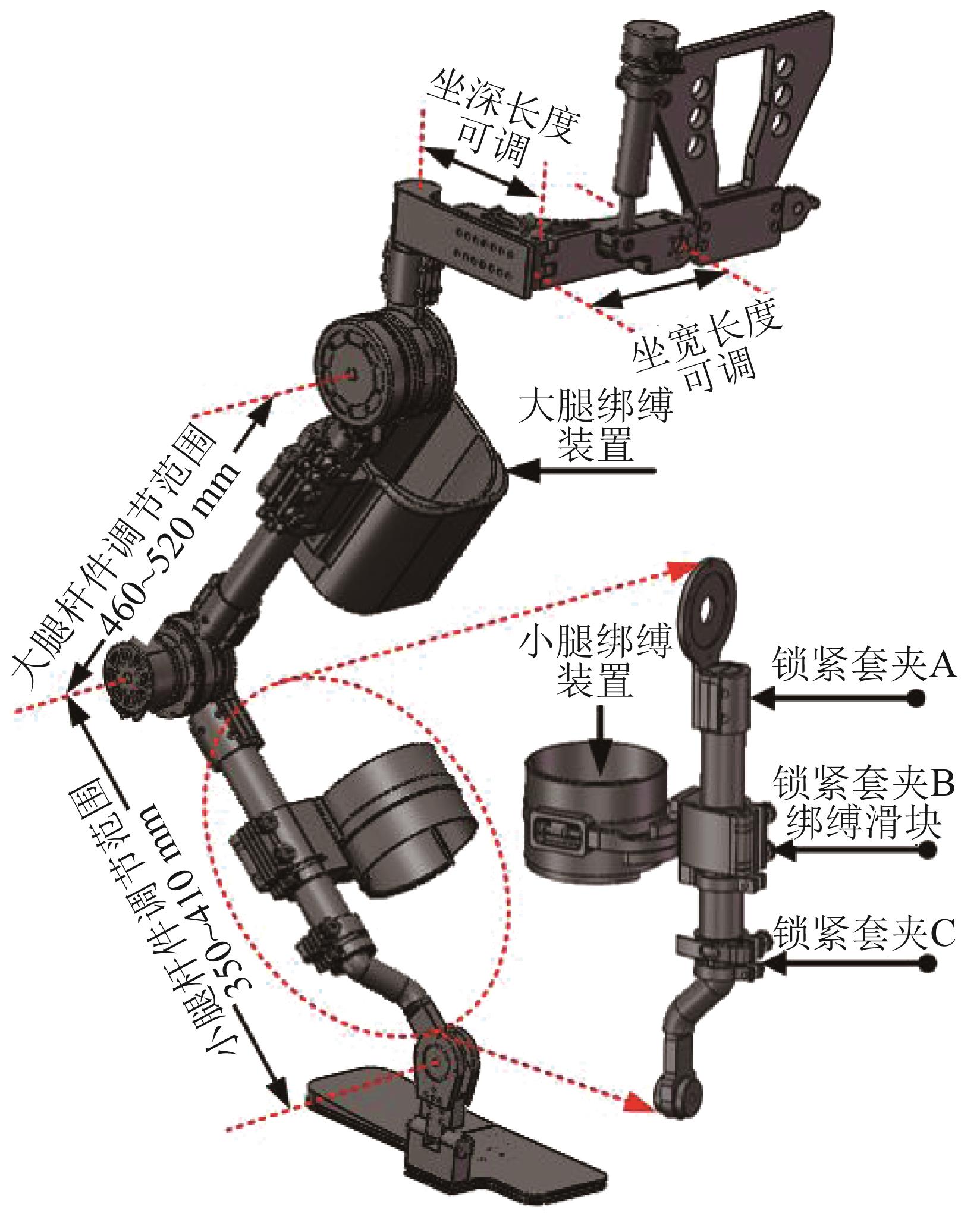
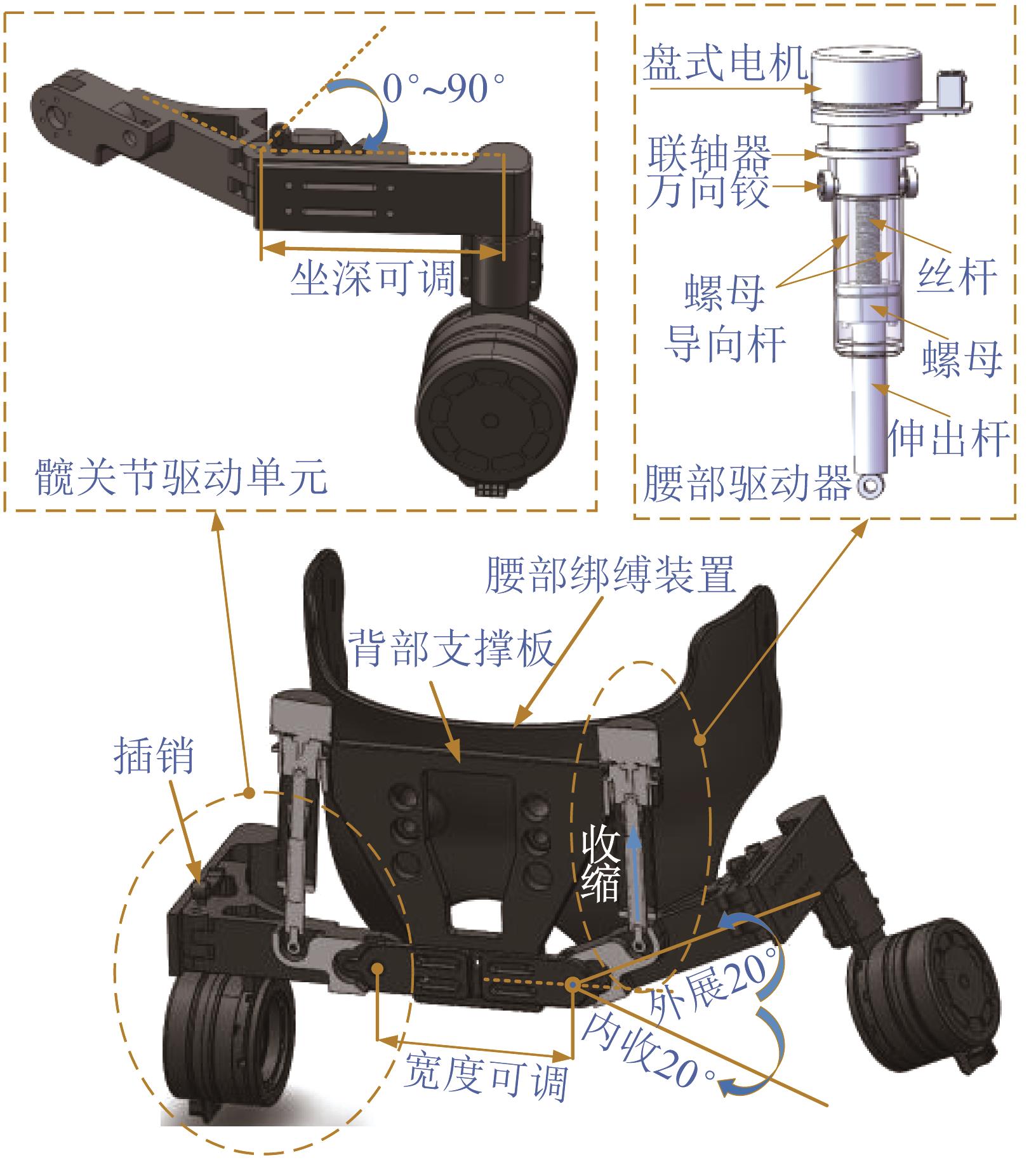
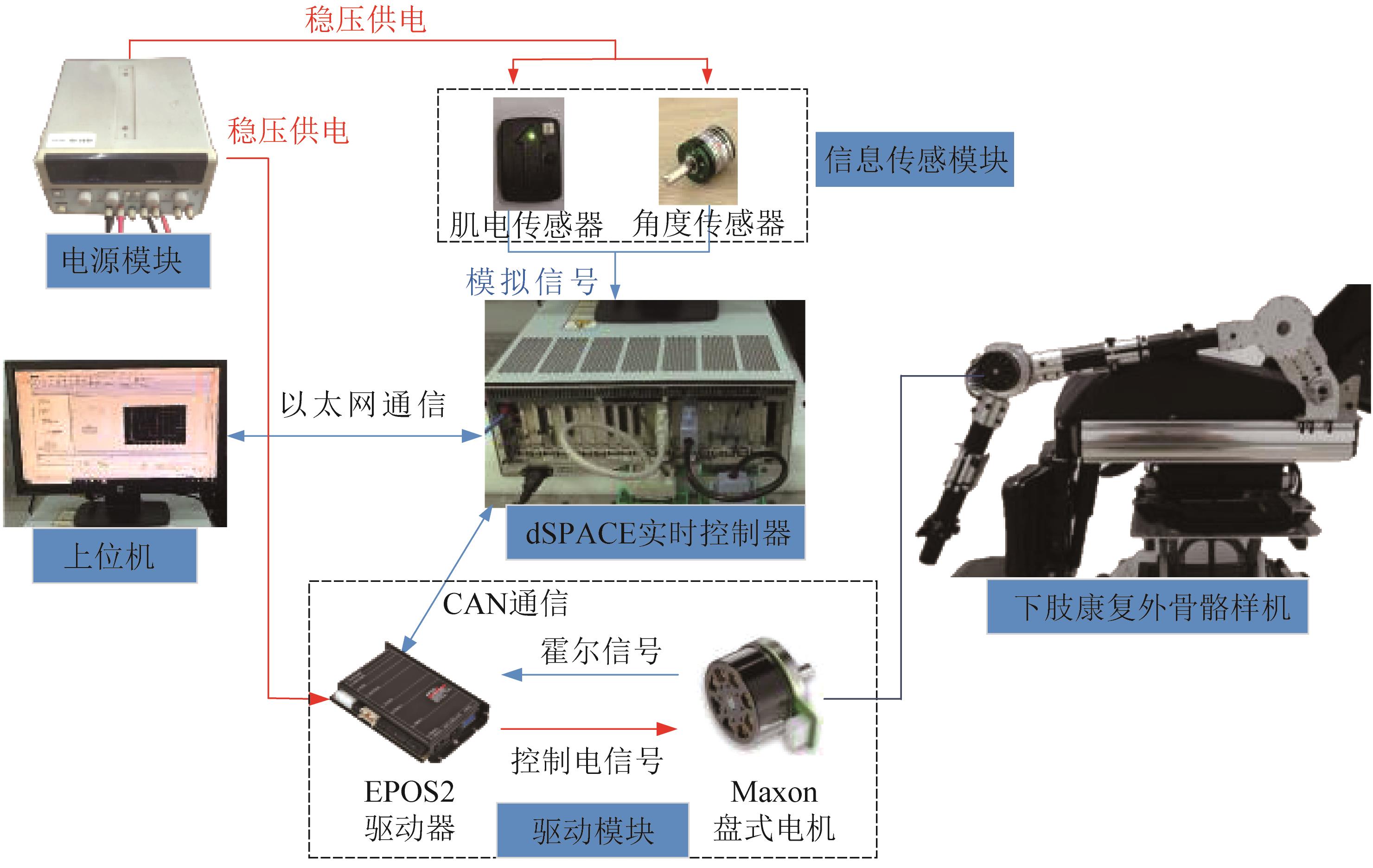
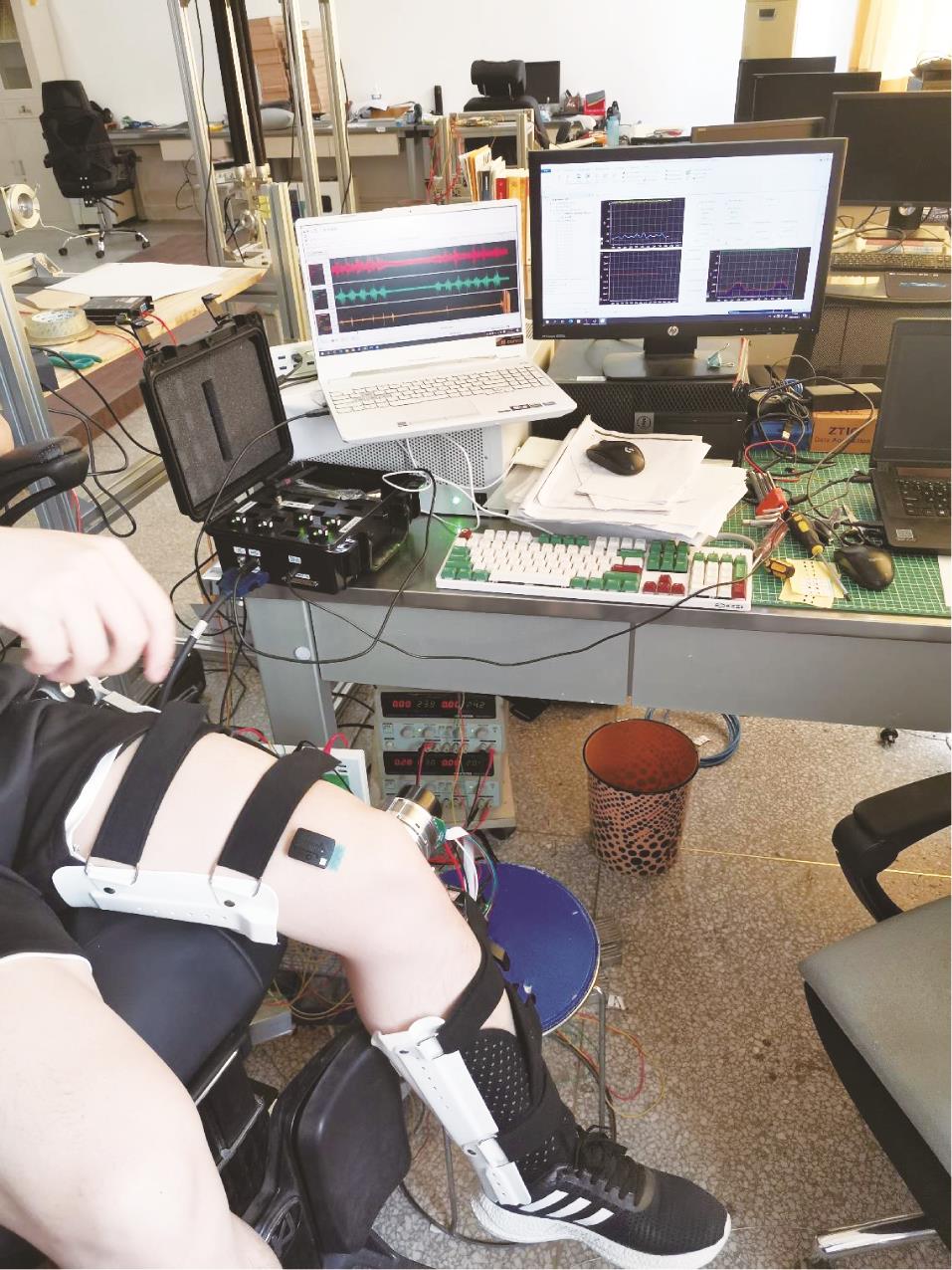
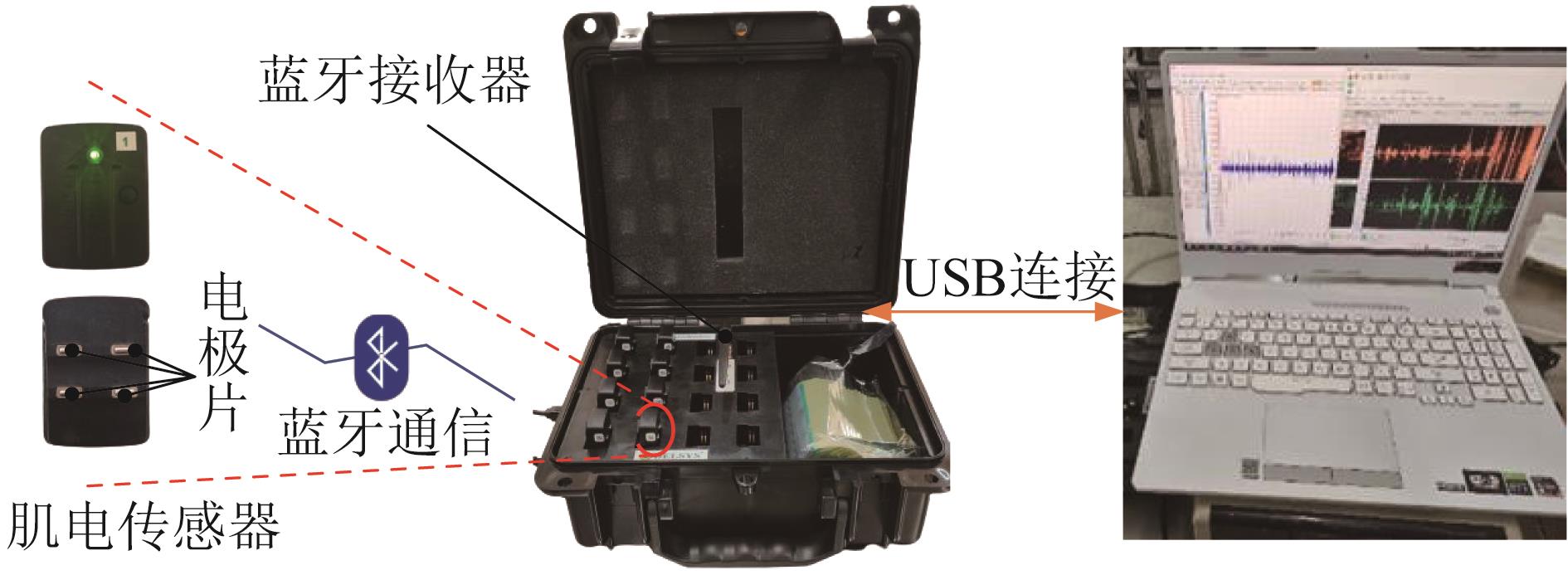
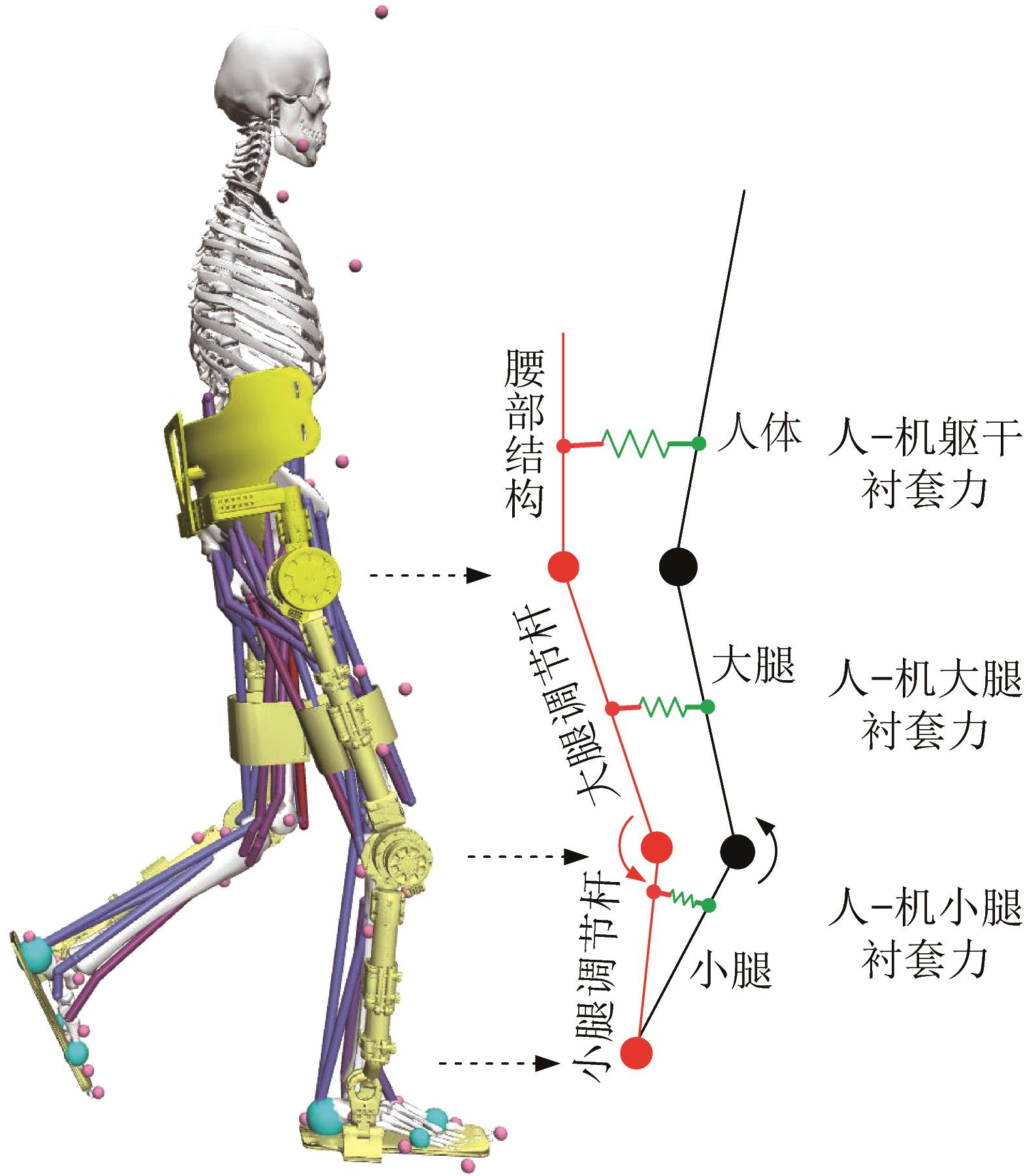
为了更好地辅助偏瘫患者的康复训练,设计了一种基于盘式电机驱动的下肢康复外骨骼机器人,并通过助力效果可视化研究与性能分析来验证其不同康复训练模式的有效性。首先,对下肢康复外骨骼机器人的结构进行了详细设计,并利用OpenSim软件进行了人机耦合的生物力学分析。然后,开展了基于位置跟踪控制的被动康复训练实验以及抗阻康复训练实验并采集表面肌电信号,验证了所设计下肢康复外骨骼机器人在不同模式下辅助患者康复训练的有效性。结果表明,穿戴下肢康复外骨骼机器人能使人体膝关节的力矩减小50%左右;在被动康复训练实验中,跟随误差为-4°~8°,且人体下肢目标肌群的肌肉激活度呈明显的周期性变化;在抗阻康复训练实验中,人体下肢目标肌群的肌肉激活度随负重的增加而提高。所设计的下肢康复外骨骼机器人具有良好的灵敏性和跟随性,其被动及抗阻康复训练模式均有助于偏瘫患者下肢的康复,具有广阔的应用前景。
关键词:
下肢康复外骨骼机器人,
康复训练,
生物力学分析,
位置跟踪控制,
肌肉激活度
|
|
| [1] |
叶诗华,陈丽飞.脑卒中患者延续性护理需求的现状及影响因素分析[J].中国医学创新,2018,15(24):69-72. doi:10.3969/j.issn.1674-4985.2018.24.019
YE S H, CHEN L F. Analysis of status and influencing factors of continuing nursing needs of patients with stroke[J]. Medical Innovation of China, 2018, 15(24): 69-72.
doi: 10.3969/j.issn.1674-4985.2018.24.019
|
|
|
| [2] |
ESQUENAZI A, TALATY M. Robotics for lower limb rehabilitation[J]. Physical Medicine and Rehabilitation Clinics of North America, 2019, 30(2): 385-397.
|
|
|
| [3] |
程雪,白定群,彭晓华.下肢外骨骼康复机器人在脑卒中康复中的应用和研究进展[J].中国康复医学杂志,2021,36(10):1327-1332. doi:10.3969/j.issn.1001-1242.2021.10.026
CHENG X, BAI D Q, PENG X H. Application and research progress of lower limb exoskeleton rehabilitation robot in stroke rehabilitation[J]. Chinese Journal of Rehabilitation Medicine, 2021, 36(10): 1327-1332.
doi: 10.3969/j.issn.1001-1242.2021.10.026
|
|
|
| [4] |
韩稷钰,王衍鸿,万大千.下肢外骨骼康复机器人的研究进展及发展趋势[J].上海交通大学学报(医学版),2022,42(2):241-246.
HAN J Y, WANG Y H, WAN D Q. Research progress and development trend of lower extremity exoskeleton rehabilitation robot[J]. Journal of Shanghai Jiaotong University (Medical Science), 2022, 42(2): 241-246.
|
|
|
| [5] |
徐飞,佀国宁,程云章,等.下肢康复机器人结构设计的研究进展[J].北京生物医学工程,2018,37(1):96-102. doi:10.3969/j.issn.1002-3208.2018.01.016
XU F, SI G N, CHENG Y Z, et al. Research advances in structural design of lower limb rehabilitation robot[J]. Beijing Biomedical Engineering, 2018, 37(1): 96-102.
doi: 10.3969/j.issn.1002-3208.2018.01.016
|
|
|
| [6] |
李龙飞,朱凌云,苟向锋.可穿戴下肢外骨骼康复机器人研究现状与发展趋势[J].医疗卫生装备,2019,40(12):89-97.
LI L F, ZHU L Y, GOU X F. Current status and development trend of wearable lower-limb exoskeleton rehabilitation robot[J]. Chinese Medical Equipment Journal, 2019, 40(12): 89-97.
|
|
|
| [7] |
褚梦秋,佀国宁,李根生,等.下肢康复机器人控制系统研究进展[J].北京生物医学工程,2018,37(6):643-656. doi:10.3969/j.issn.1002-3208.2018.06.014
CHU M Q, SI G N, LI G S, et al. Research progress on control system of lower limb rehabilitation robot[J]. Beijing Biomedical Engineering, 2018, 37(6): 643-656.
doi: 10.3969/j.issn.1002-3208.2018.06.014
|
|
|
| [8] |
SUZUKI K, MITO G, KAWAMOTO H, et al. Intention-based walking support for paraplegia patients with robot suit HAL[J]. Advanced Robotics, 2007, 21(12): 1441-1469.
|
|
|
| [9] |
BANALA S K, AGRAWAL S K, KIM S H, et al. Novel gait adaptation and neuromotor training results using an active leg exoskeleton[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(2): 216-225.
|
|
|
| [10] |
刘亚丽,宋遒志,赵明升,等.基于力位混合控制的踝关节外骨骼机器人四段式助力技术[J].兵工学报,2021,42(12):2722-2730. doi:10.3969/j.issn.1000-1093.2021.12.020
LIU Y L, SONG Q Z, ZHAO M S, et al. The four-stage assisted technology of flexible ankle exoskeleton robot based on force and position hybrid control[J]. Acta Armamentarii, 2021, 42(12): 2722-2730.
doi: 10.3969/j.issn.1000-1093.2021.12.020
|
|
|
| [11] |
赵广宇,何龙,李新俊,等.基于支持向量机的外骨骼机器人灵敏度放大控制[J].计算机测量与控制,2016,24(9):211-214.
ZHAO G Y, HE L, LI X J, et al. Support vector machine based sensitivity amplification control for a lower extremity exoskeleton[J]. Computer Measurement and Control, 2016, 24(9): 211-214.
|
|
|
| [12] |
石征锦,秦朋,耿枫,等.基于sEMG的一种下肢外骨骼机器人康复训练控制策略[J].信息技术与信息化,2021(1):244-245. doi:10.3969/j.issn.1672-9528.2021.01.075
SHI Z J, QIN P, GENG F, et al. A lower limb exoskeleton robot rehabilitation training control strategy based on sEMG[J]. Information Technology and Informatization, 2021(1): 244-245.
doi: 10.3969/j.issn.1672-9528.2021.01.075
|
|
|
| [13] |
王成焘,王冬梅,白雪岭,等.人体骨肌系统生物力学[M].北京:科学出版社,2015.
WANG C T, WANG D M, BAI X L, et al. Biomechanics of human skeletal muscle system[M]. Beijing: Science Press, 2015.
|
|
|
| [14] |
全国人类工效学标准化技术委员会. 中国成年人人体尺寸: [S].北京:中国标准出版社,2023:3-23.
National Ergonomics Standardization Technical Committee. Human dimensions of Chinese adults: [S]. Beijing: China Standards Press, 2023: 3-23.
|
|
|
| [15] |
韩亚丽,王兴松.人体行走下肢生物力学研究[J].中国科学:技术科学,2011,41(5):592-601.
HAN Y L, WANG X S. Biomechanical study of human walking lower limb[J]. Scientia Sinica (Technologica), 2011, 41(5): 592-601.
|
|
|
| [16] |
DELP S L, LOAN J P, HOY M G, et al. An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures[J]. IEEE Transactions on Biomedical Engineering, 1990, 37(8): 757-767.
|
|
|
| [17] |
DELP S L, ANDERSON F C, ARNOLD A S, et al. OpenSim: open source to create and analyze dynamic simulations of movement[J]. IEEE Transactions on Bio-medical Engineering, 2007, 54(11): 1940-1950.
|
|
|
| [18] |
KAWAMOTO H, HAYASHI T, SAKURAI T, et al. Development of single leg version of HAL for hemiplegia[C]//2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Minneapolis, MN, Sep. 3-6, 2009.
|
|
|
| [19] |
RODRÍGUEZ-FERNÁNDEZ A, LOBO-PRAT J, FONT-LLAGUNES J M. Systematic review on wearable lower-limb exoskeletons for gait training in neuromuscular impairments[J]. Journal of NeuroEngineering and Rehabilitation, 2021, 18: 22.
|
|
|
| [20] |
CHAND T. An algorithm for generating muscle-actuated simulations of long-duration movements[C]//Biomedical Computation at Stanford (BCATS) Symposium. Palo Alto, CA: [S.l.], 2006: 31.
|
|
|
| [21] |
周瑞.人机耦合下肢外骨骼机器人运动分析及其仿真[D].兰州:兰州理工大学,2020:46-47.
ZHOU R. Kinematics analysis and simulation of human-machine coupled lower extremity exoskeleton robot[D]. Lanzhou: Lanzhou University of Technology, 2020: 46-47.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|