| Design Theory and Method |
|


|
|
|
| Six-point leveling algorithm and synchronous control method for horizontal rotating equipment of space station cabin |
Ming-yan REN( ),Xu TAN,Ting ZENG,Rong WANG,Hai-yue LI ),Xu TAN,Ting ZENG,Rong WANG,Hai-yue LI |
| Beijing Satellite Manufacturing Factory Co. , Ltd. , Beijing 100094, China |
|
|
|
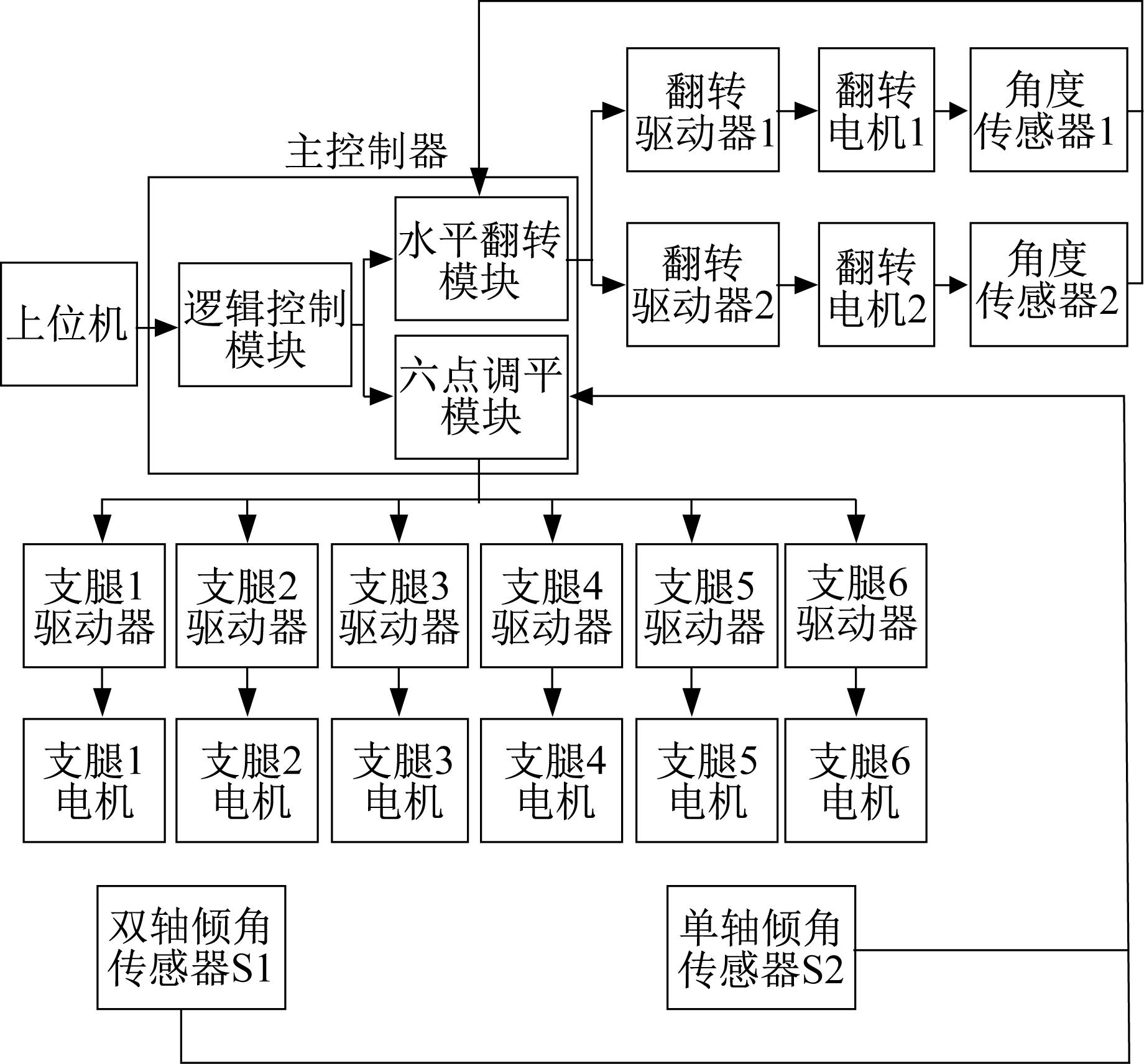
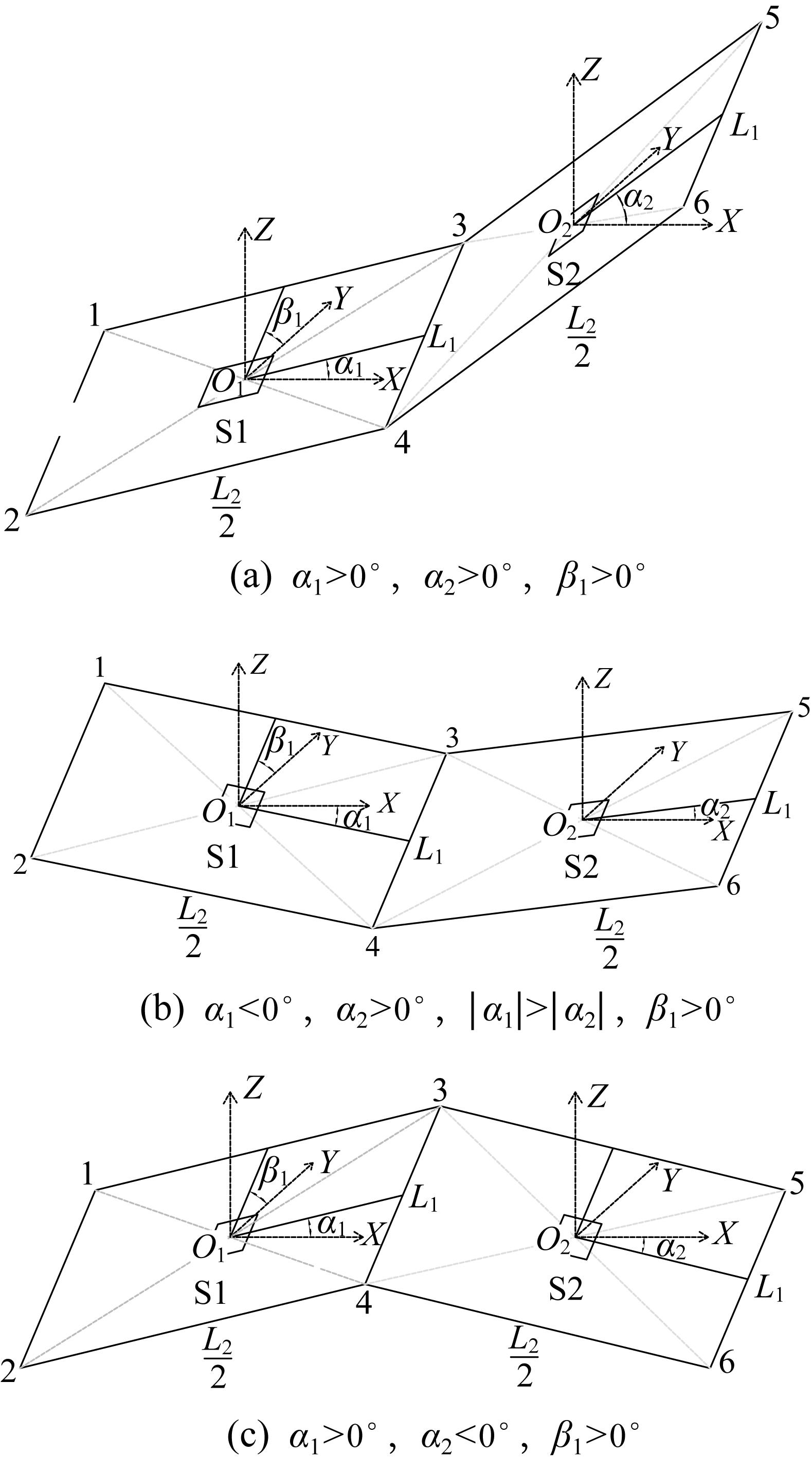
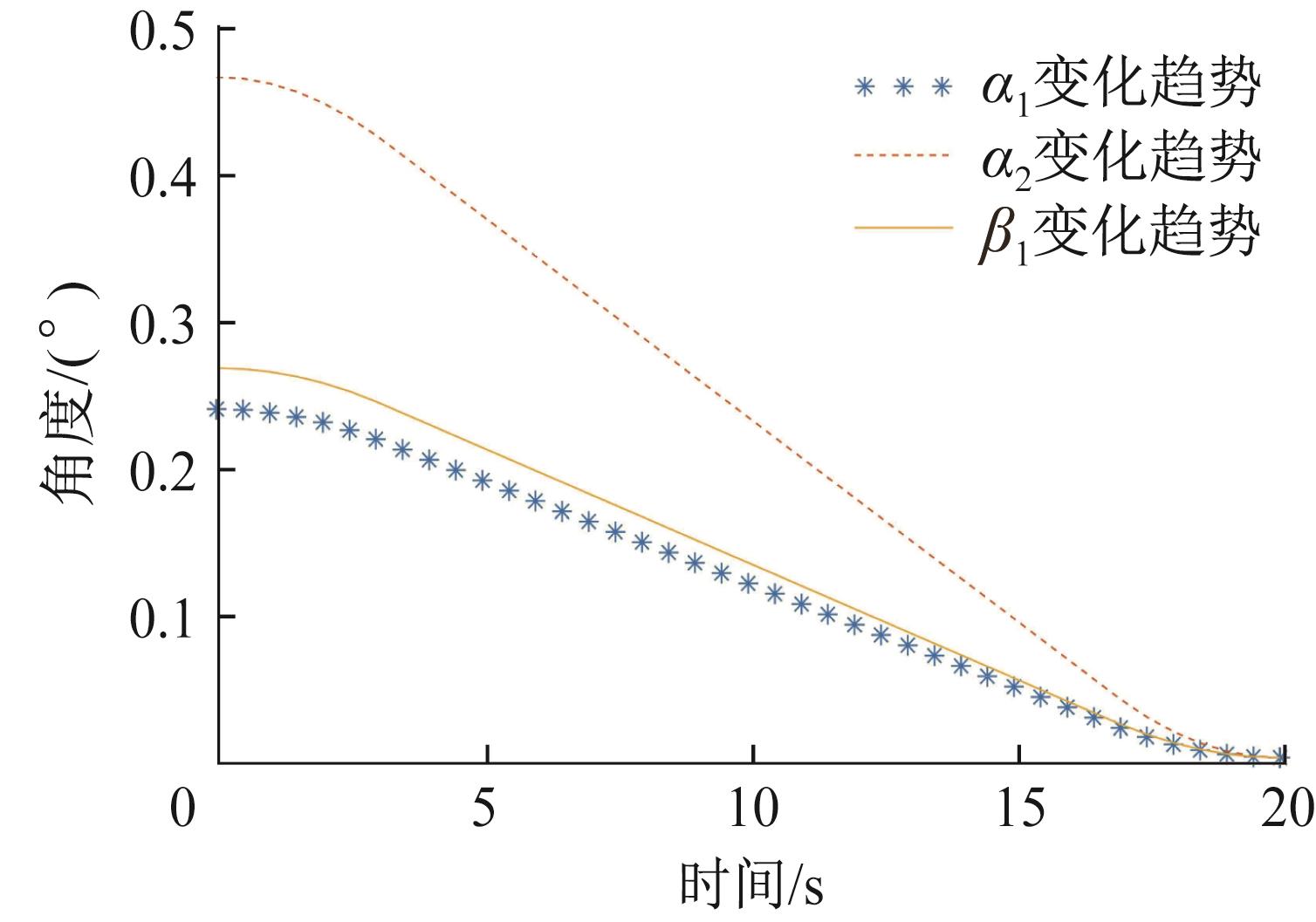
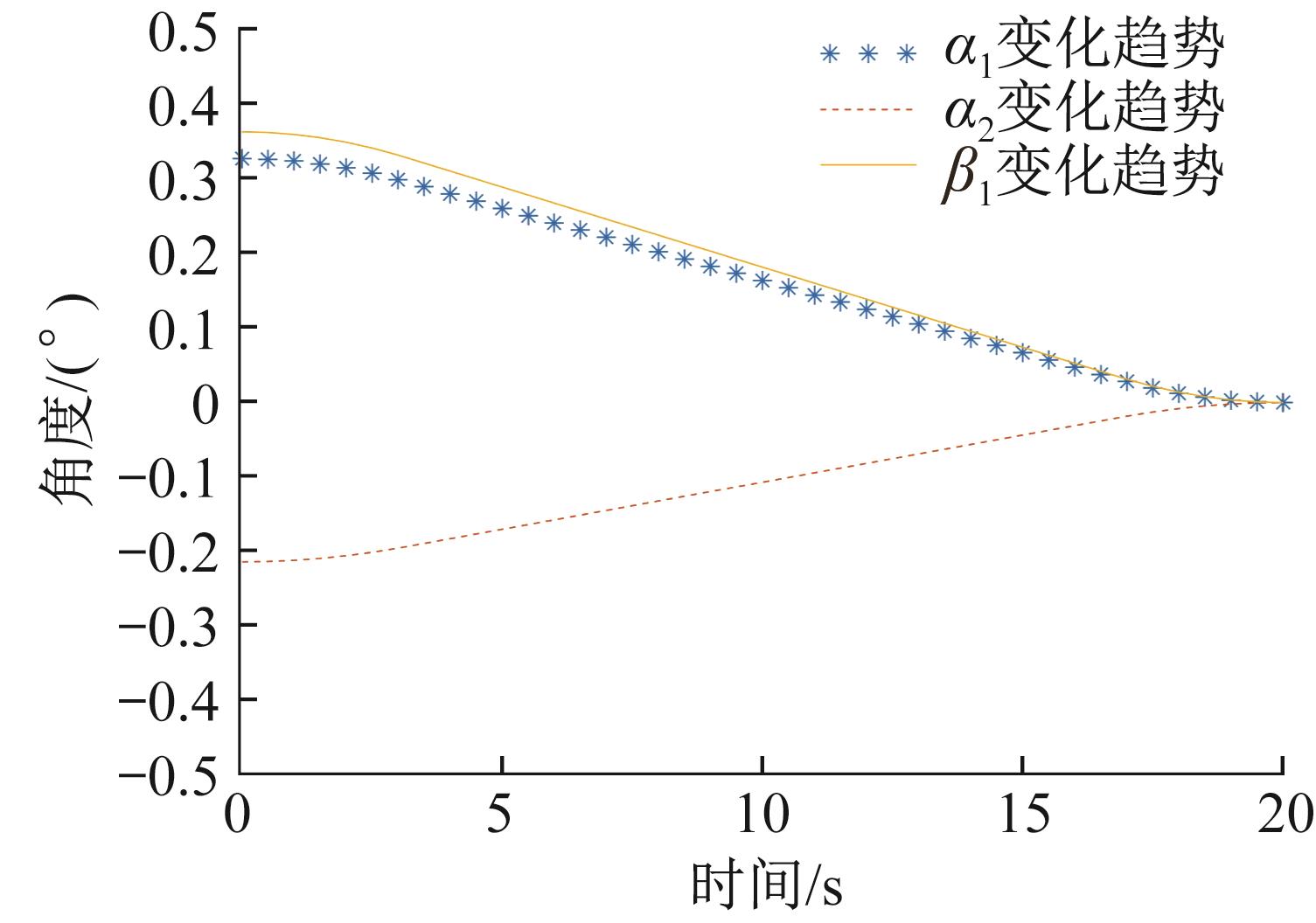
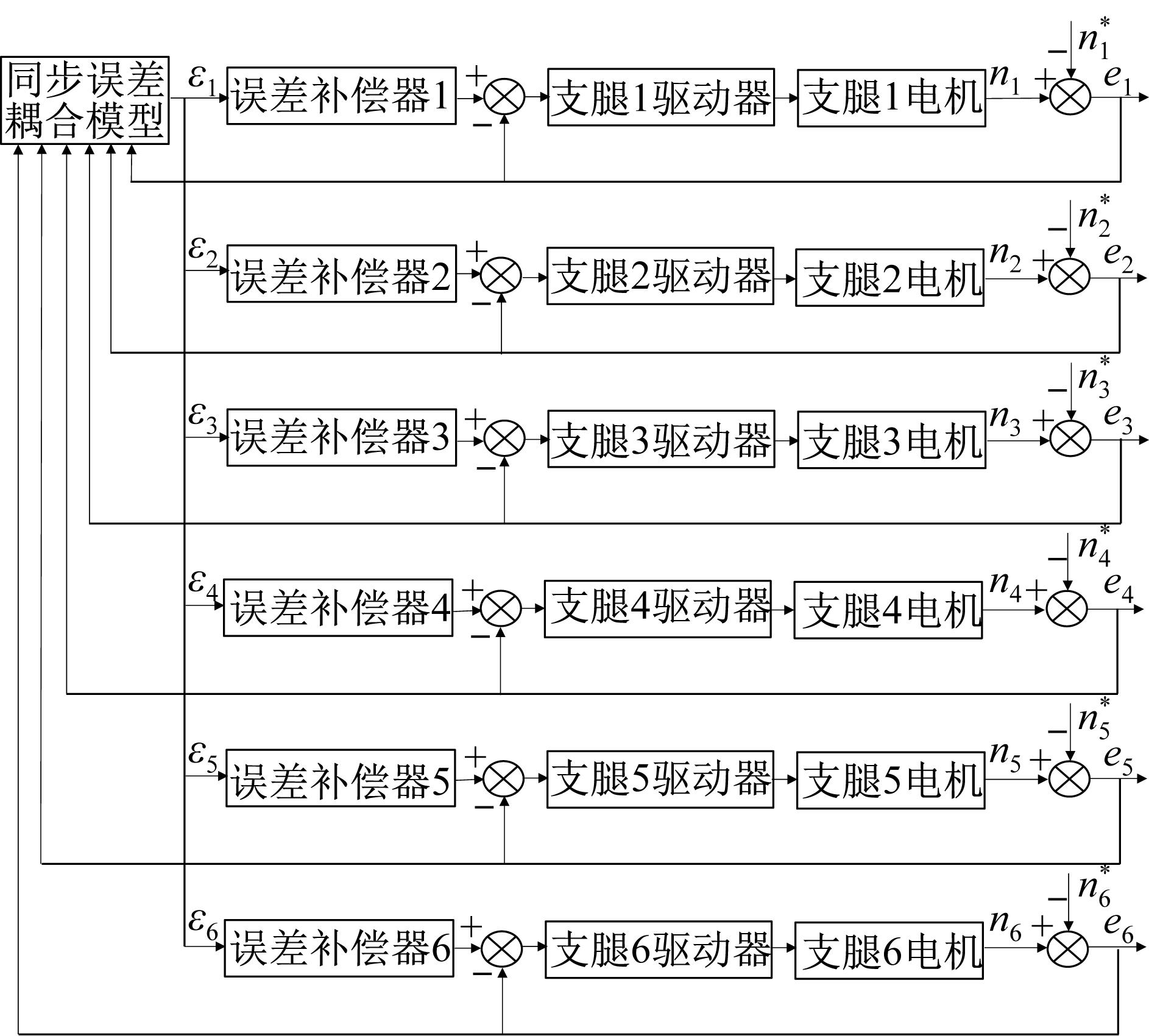
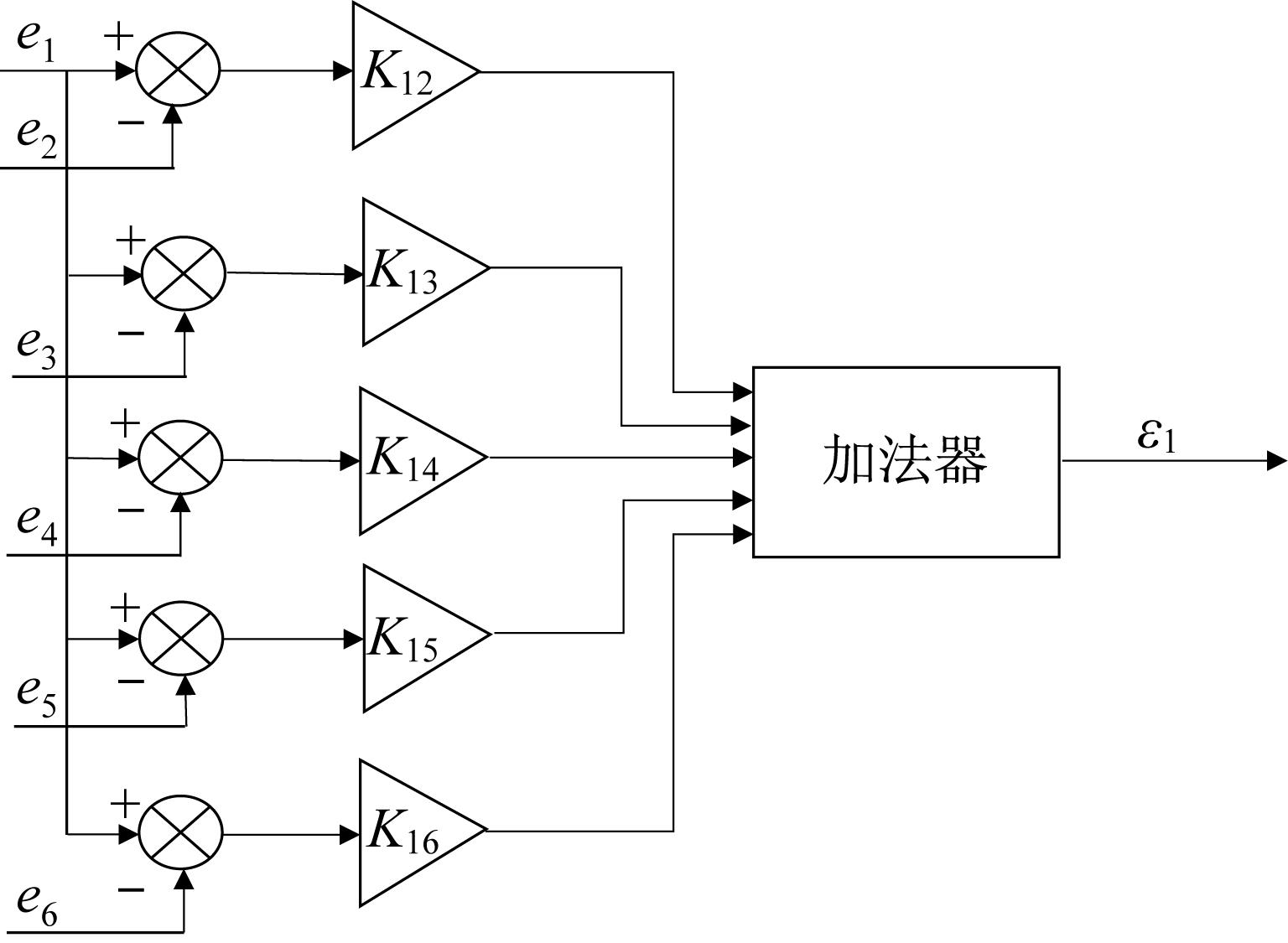
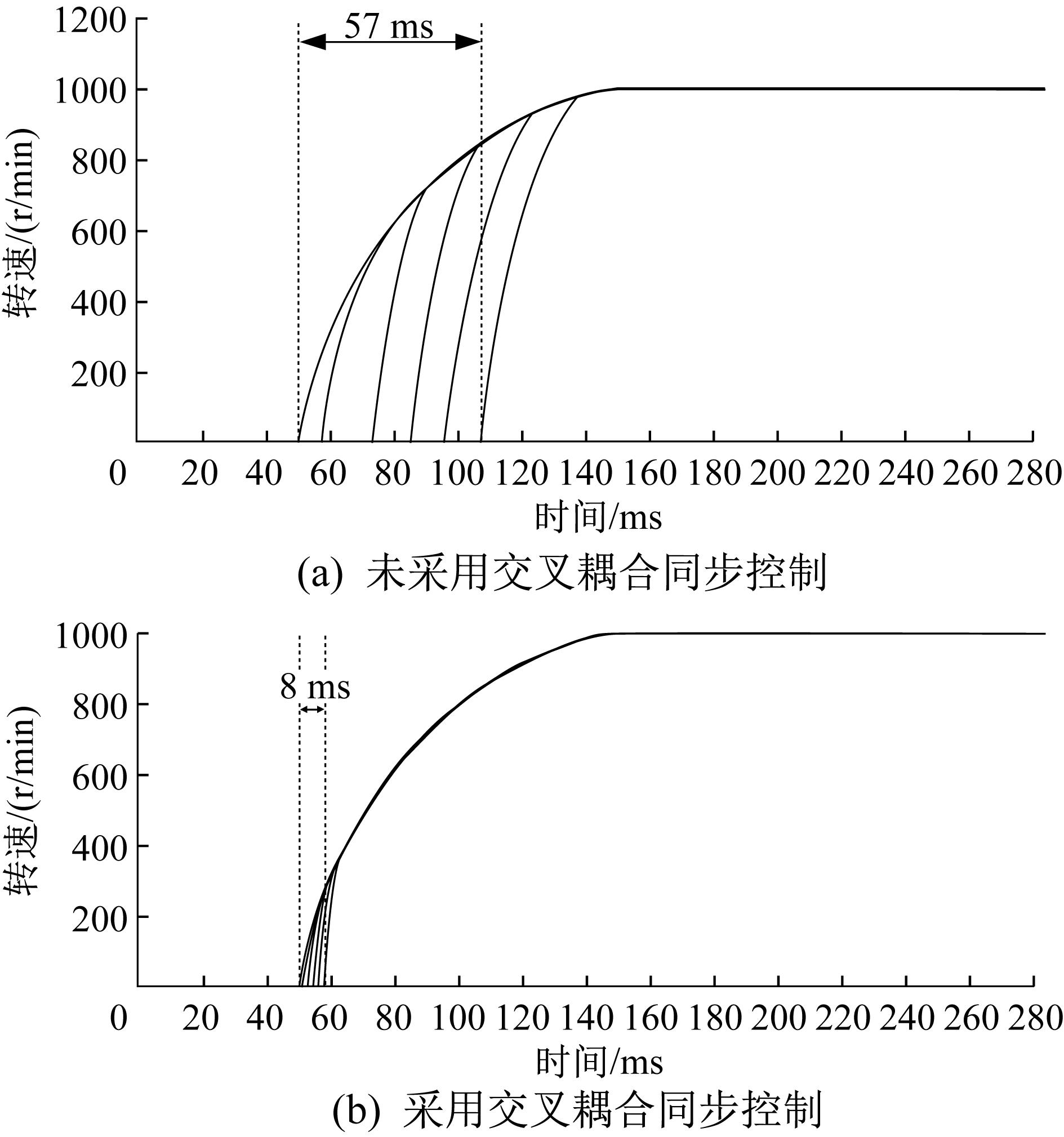
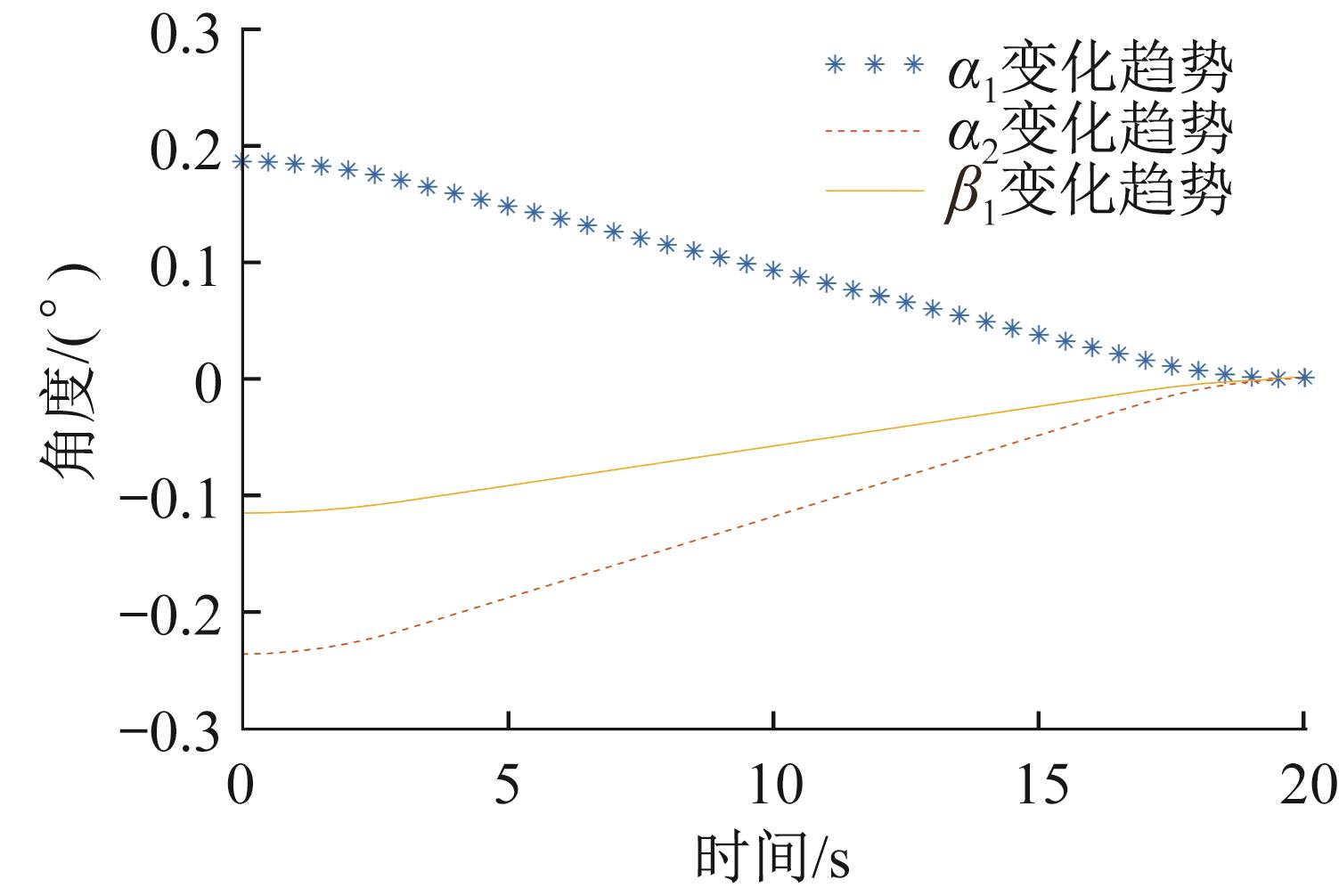
Abstract Aiming at the problem that the horizontal rotating equipment of space station cabin is easy to deform in the length direction after bearing load of 30 t, a six-point leveling algorithm and synchronous control method was proposed. On the basis of installing one screw lifting outrigger at each of the four corners of the original horizontal rotating equipment of space station cabin, one screw lifting outrigger was added at the center of two long sides, and the levelness of the horizontal rotating equipment upper plane was within 0.001° through the coordinated control of the height of each screw lifting outrigger, so as to ensure the centroid stability and no structure deformation of the space station cabin. At the same time, the feasibility of six-point leveling algorithm and synchronous control method was verified by theoretical simulation. The experimental test showed that the proposed method had good leveling effect, and the synchronous control error of six screw lifting outriggers was less than 8 ms; after leveling, the maximum error of upper plane levelness of the horizontal rotating equipment was 0.000 8°, and the maximum deformation was 0.074 mm, which could be ignored and met the expected goal. The results showed that the application of the six-point leveling algorithm and synchronous control method effectively avoided the deformation in the length direction of the horizontal rotating equipment of space station cabin after bearing load of 30 t, improved the levelness of the horizontal rotating equipment and extended its service life, and ensured the centroid stability of the space station cabin after it was placed on the horizontal rotating equipment, which could provide technical support for the subsequent space station assembly process.
|
|
Received: 29 January 2022
Published: 06 January 2023
|
|
|
空间站舱体水平旋转装备六点调平算法及同步控制方法
针对空间站舱体水平旋转装备负载30 t后在长度方向上易产生变形的问题,提出了六点调平算法及同步控制方法。在原有空间站舱体水平旋转装备的4个边角处各安装1条螺旋升降支腿的基础上,在2条长边的中心位置处各增加1条螺旋升降支腿,通过协同控制各螺旋升降支腿的高度,使得水平旋转装备上平面的水平度达到0.001°以内,以确保空间站舱体的质心稳定以及结构不发生变形。同时,利用理论仿真验证了六点调平算法及同步控制方法的可行性。经实验测试,所提出方法的调平效果良好,6条螺旋升降支腿的同步控制误差小于8 ms;调平后水平旋转装备上平面水平度的最大误差为0.000 8°,最大变形量为0.074 mm,可忽略不计,符合预期目标。结果表明,六点调平算法及同步控制方法的应用有效避免了空间站舱体水平旋转装备负载30 t后在长度方向上产生变形的问题,提高了水平旋转装备的水平度并延长了其使用寿命,同时确保了空间站舱体放置在水平旋转装备上后质心稳定,这可为后续的空间站总装过程提供技术保障。
关键词:
空间站舱体,
水平旋转装备,
六点调平算法,
同步控制方法,
水平度
|
|
| [1] |
REAM M D, CLAXTON G L. Platform leveling apparatus: US5082085A[P]. 1992-01-21.
|
|
|
| [2] |
PARLIKAR V V, KURULKAR P M, MISHRA A K, et al. Design of electromechanical outrigger system for platform leveling of heavy load weapon systems[C]//Proceedings of National Conference RACTEE-2011, Sangrur, Punjab, Jan. 25-26, 2011.
|
|
|
| [3] |
高天翔.载重平台液压调平系统的同步控制研究[D].太原:中北大学,2015:11-19. doi:10.1109/icma.2015.7237549
GAO Tian-xiang. Research on synchronous control of hydraulic leveling system of the load platform[D]. Taiyuan: North University of China, 2015: 11-19.
doi: 10.1109/icma.2015.7237549
|
|
|
| [4] |
徐嵩. 发射车六点调平系统建模和控制算法研究[D].哈尔滨:哈尔滨工业大学,2017:44-48.
XU Song. Research on modeling and algorithm of launch vehicle’s leveling system with six supports[D]. Harbin: Harbin Institute of Technology, 2017: 44-48.
|
|
|
| [5] |
陈庆华.大型液压设备四角调平控制系统的研究与应用[J].机械设计,2011,28(6):81-84. doi:10.13841/j.cnki.jxsj.2011.06.014 .
CHEN Qing-hua. Research and application of four corners leveling control system in large NC hydraulic equipment[J]. Journal of Machine Design, 2011, 28(6): 81-84.
doi: 10.13841/j.cnki.jxsj.2011.06.014
|
|
|
| [6] |
韩其义,张英男.等温锻造液压机的四角调平控制系统[J]. 锻压装备与制造系统,2010,45(6):28-30. doi:10.3969/j.issn.1672-0121.2010.06.007
HAN Qi-yi, ZHANG Ying-nan. A four corners leveling control system of isothermal forging press[J]. China Metalforming Equipment & Manufacturing Technology, 2010, 45(6): 28-30.
doi: 10.3969/j.issn.1672-0121.2010.06.007
|
|
|
| [7] |
李一,高亚东,贺建华,等.四点调平系统刚柔耦合建模及机液联合仿真[J].液压与气动,2018(12):79-83. doi:10.11832/j.issn.1000-4858.2018.12.015
LI Yi, GAO Ya-dong, HE Jian-hua, et al. Rigid-flexible coupling model and hydro-mechanical co-simulation of four point leveling system[J]. Chinese Hydraulics & Pneumatics, 2018(12): 79-83.
doi: 10.11832/j.issn.1000-4858.2018.12.015
|
|
|
| [8] |
赵静一,杨宇静,康绍鹏,等.自行式液压平板车四点支撑“面追逐式”调平策略的研究与应用[J].机床与液压,2015,43(15):57-60. doi:10.3969/j.issn.1001-3881.2015.15.014
ZHAO Jing-yi, YANG Yu-jing, KANG Shao-peng, et al. Research and application of four-point support "Flat Chasing Style" leveling strategy on self-propelled hydraulic transporter[J]. Machine Tool & Hydraulics, 2015, 43(15): 57-60.
doi: 10.3969/j.issn.1001-3881.2015.15.014
|
|
|
| [9] |
梁杰.基于超声波测距技术的摊铺机自动调平控制系统[J].建筑工程,2005(10):67-69. doi:10.3969/j.issn.1001-554X.2005.10.021
LIANG Jie. Design of automatic leveling control system based on ultrasonic distance measurement technology for paver[J]. Construction Machinery, 2005(10): 67-69.
doi: 10.3969/j.issn.1001-554X.2005.10.021
|
|
|
| [10] |
袁海文,王天晖,袁海斌.基于CAN总线的DYY300型运梁车升降及调平系统原理设计与工程实现[J].仪器仪表学报,2002,23(10):703-705. doi:10.3321/j.issn:0254-3087.2002.z2.109
YUAN Hai-wen, WANG Tian-hui, YUAN Hai-bin. Principle and development of the DYY300 bridge transport vehicle horizontal stable system[J]. Chinese Journal of Scientific Instrument, 2002, 23(3): 703-705.
doi: 10.3321/j.issn:0254-3087.2002.z2.109
|
|
|
| [11] |
何清华,曾益昆.静力压桩机机身的自动调平系统研究[J].建筑机械,2000(11):28-30. doi:10.3969/j.issn.1001-554X.2000.11.012
HE Qing-hua, ZENG Yi-kun. Automatic level control system of static pile drive’s body[J]. Construction Machinery, 2000(11): 28-30.
doi: 10.3969/j.issn.1001-554X.2000.11.012
|
|
|
| [12] |
刘颖,王志刚,王红,等.步进电机升降频的优化算法[J]. 微电机,2010,43(8):93-97. doi:10.3969/j.issn.1001-6848.2010.08.024
LIU Ying, WANG Zhi-gang, WANG Hong, et al. An optimization algorithm to accelerate or decelerate speed of step motor[J]. Micromotors, 2010, 43(8): 93-97.
doi: 10.3969/j.issn.1001-6848.2010.08.024
|
|
|
| [13] |
王邦继,刘庆想,周磊,等.步进电机控制系统建模及加减速曲线优化[J].电机与控制学报,2018,22(1):37-42,52. doi:10.15938/j.emc.2018.01.006
WANG Bang-ji, LIU Qing-xiang, ZHOU Lei, et al. Modeling of stepper motor control system and optimization of acceleration and deceleration curve[J]. Electric Machines and Control, 2018, 22(1): 37-42, 52.
doi: 10.15938/j.emc.2018.01.006
|
|
|
| [14] |
ACARNLEY P. Stepping motors: a guide to theory and practice[M]. London: The Institution of Electrical Engineers, 2002: 27-35.
|
|
|
| [15] |
仇杨.垂直发射平台快速姿态调平高性能控制策略研究[D].南京:南京理工大学,2017:35-40.
QIU Yang. Research on high performance control strategy for fast attitude leveling of vertical launching platform[D]. Nanjing: Nanjing University of Science and Technology, 2017: 35-40.
|
|
|
| [16] |
苏学满,孙丽丽,于华,等.四轮毂电机交叉耦合同步控制策略研究[J].机械设计与制造,2020(7):89-92. doi:10.3969/j.issn.1001-3997.2020.07.022
SU Xue-man, SUN Li-li, YU Hua, et al. Research on cross coupling synchronous control strategy of four wheel hub motors[J]. Machinery Design & Manufacture, 2020(7): 89-92.
doi: 10.3969/j.issn.1001-3997.2020.07.022
|
|
|
| [17] |
肖兴维,马国鹭,曾国英,等.正交视觉与倾角仪组合空间位姿测量方法研究[J].激光技术,2020,44(3):278-282. doi:10.7510/jgjs.issn.1001-3806.2020.03.002
XIAO Xing-wei, MA Guo-lu, ZENG Guo-ying, et al. Research on orthogonal vision and inclinometer combination spatial pose measurement method[J]. Laser Technology, 2020, 44(3): 278-282.
doi: 10.7510/jgjs.issn.1001-3806.2020.03.002
|
|
|
| [18] |
邓川.倾角传感器安装误差对轨道测量仪超高测量的影响[J].铁道建筑,2019,59(3):128-130. doi:10.3969/j.issn.1003-1995.2019.03.32
DENG Chuan. Influence of inclinometer installation error on superelevation measurement of track measuring instrument[J]. Railway Engineering, 2019, 59(3): 128-130.
doi: 10.3969/j.issn.1003-1995.2019.03.32
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|