| 机械零部件与装备设计 |
|

|
|
|
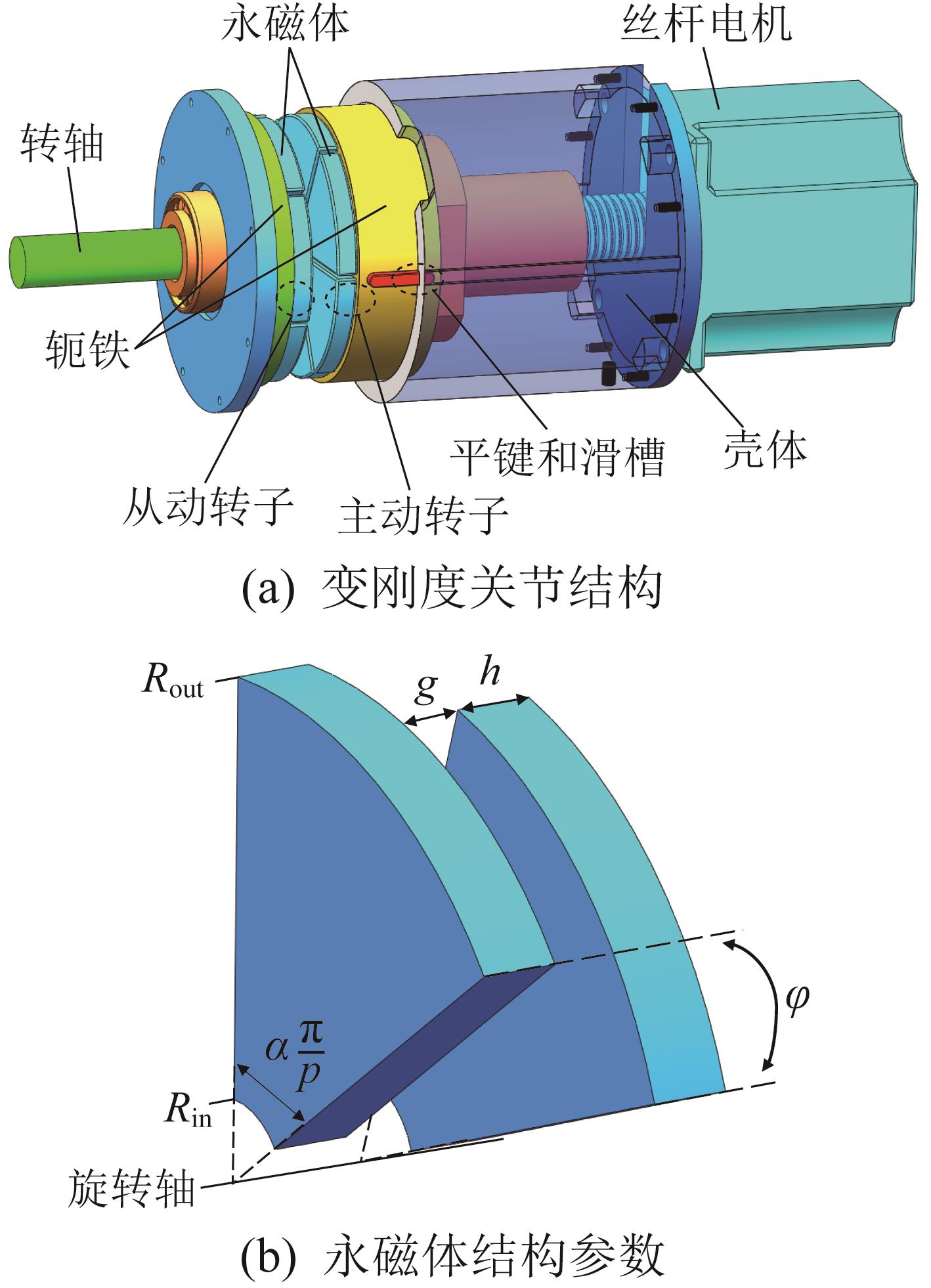
| 基于轴向磁耦合的变刚度关节设计与实验验证 |
汪峻加( ),谢霆聪,徐锦涛,黄龙() ),谢霆聪,徐锦涛,黄龙() |
| 长沙理工大学 机械与运载工程学院,湖南 长沙 410114 |
|
| Design and experimental verification of variable stiffness joint based on axial magnetic coupling |
| Junjia WANG(),Tingcong XIE,Jintao XU,Long HUANG() |
| College of Mechanical and Vehicle Engineering, Changsha University of Science & Technology, Changsha 410114, China |
引用本文:
汪峻加,谢霆聪,徐锦涛,黄龙. 基于轴向磁耦合的变刚度关节设计与实验验证[J]. 工程设计学报, 2026, 33(1): 130-137.
Junjia WANG,Tingcong XIE,Jintao XU,Long HUANG. Design and experimental verification of variable stiffness joint based on axial magnetic coupling[J]. Chinese Journal of Engineering Design, 2026, 33(1): 130-137.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.123
或
https://www.zjujournals.com/gcsjxb/CN/Y2026/V33/I1/130
|
| [1] |
潘杰, 于靖军, 裴旭. 柔性手爪机构设计与变刚度技术研究发展综述[J]. 机械工程学报, 2024, 60(13): 281-296. doi:10.3901/jme.2024.13.281
PAN J, YU J J, PEI X. Development of flexible gripper mechanism design and variable stiffness technology research[J]. Journal of Mechanical Engineering, 2024, 60(13): 281-296.
doi: 10.3901/jme.2024.13.281
|
| [2] |
MAO Z Z, WANG C L, RUI Y F, et al. Variable stiffness mechanism for single-joint lower limb wearable exoskeleton: a review[C]//2022 6th International Conference on Automation, Control and Robots. Shanghai, Sep. 23-25, 2022.
|
| [3] |
蒲萌浩, 徐富康, 柴治平, 等. 软体技术在机器人化制造中的应用与展望[J]. 机器人, 2024, 46(2): 158-177.
PU M H, XU F K, CHAI Z P, et al. Application and perspective on soft technologies for robotized manufacturing[J]. Robot, 2024, 46(2): 158-177.
|
| [4] |
SUN H, PARK S, HWANG D. Compact modular robotic wrist with variable stiffness capability[J]. IEEE Transactions on Robotics, 2025, 41: 141-158.
|
| [5] |
HU X Y, LI Y B, WU H Y, et al. A series variable-stiffness joint for robot-assisted resistance training[C]//2024 IEEE/RSJ International Conference on Intelligent Robots and Systems. Abu Dhabi, Oct. 14-18, 2024.
|
| [6] |
KUMAR S, ZWALL M R, BOLÍVAR-NIETO E A, et al. Extremum seeking control for stiffness auto-tuning of a quasi-passive ankle exoskeleton[J]. IEEE Robotics and Automation Letters, 2020, 5(3): 4604-4611.
|
| [7] |
WOLF S, EIBERGER O, HIRZINGER G. The DLR FSJ: energy based design of a variable stiffness joint[C]//2011 IEEE International Conference on Robotics and Automation. Shanghai, May 9-13, 2011.
|
| [8] |
SUN J T, GUO Z, ZHANG Y B, et al. A novel design of serial variable stiffness actuator based on an Archimedean spiral relocation mechanism[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(5): 2121-2131.
|
| [9] |
MILAZZO G, LEMERLE S, GRIOLI G, et al. Design, characterization, and validation of a variable stiffness prosthetic elbow[J]. IEEE Transactions on Robotics, 2025, 41: 82-95.
|
| [10] |
CONTRERAS-CALDERÓN M G, LARIBI M A, ARSICAULT M, et al. Design, analysis, and simulation of a new variable stiffness joint based on antagonist principle[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2022, 236(18): 9991-10000.
|
| [11] |
BAGGETTA M, BERSELLI G, PALLI G, et al. Design, modeling, and control of a variable stiffness elbow joint[J]. The International Journal of Advanced Manufacturing Technology, 2022, 122(11): 4437-4451.
|
| [12] |
HAO Y F, WANG T M, WEN L. A programmable mechanical freedom and variable stiffness soft actuator with low melting point alloy[M]//Intelligent Robotics and Applications. Cham: Springer International Publishing, 2017: 151-161.
|
| [13] |
SUDANO A, ACCOTO D, ZOLLO L, et al. Design, development and scaling analysis of a variable stiffness magnetic torsion spring[J]. International Journal of Advanced Robotic Systems, 2013, 10(10): 372.
|
| [14] |
SHARDYKO I V, KOPYLOV V M, VOLNYAKOV K A. Design, modeling, and control of a variable stiffness joint based on a torsional magnetic spring[J]. Computer Research and Modeling, 2023, 15(5): 1323-1347.
|
| [15] |
ZHANG M, FANG L J, SUN F, et al. Realization of flexible motion of robot joint with a novel permanent magnetic spring[C]//2018 IEEE International Conference on Intelligence and Safety for Robotics. Shenyang, Aug. 24-27, 2018.
|
| [16] |
RAFEEDI F A, YOON J H, HONG D. Design and control of a novel compact nonlinear rotary magnetic SEA (MSEA) for practical robotic gripper implementation[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 7643-7650.
|
| [17] |
CHOI J, PARK S, LEE W, et al. Design of a robot joint with variable stiffness[C]//2008 IEEE International Conference on Robotics and Automation. Pasadena, CA, May 19-23, 2008.
|
| [18] |
DOLISY B, MEZANI S, LUBIN T, et al. A new analytical torque formula for axial field permanent magnets coupling[J]. IEEE Transactions on Energy Conversion, 2015, 30(3): 892-899.
|
| [19] |
LUBIN T, MEZANI S, REZZOUG A. Simple analytical expressions for the force and torque of axial magnetic couplings[J]. IEEE Transactions on Energy Conversion, 2012, 27(2): 536-546.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|