| 可靠性与保质设计 |
|

|
|
|
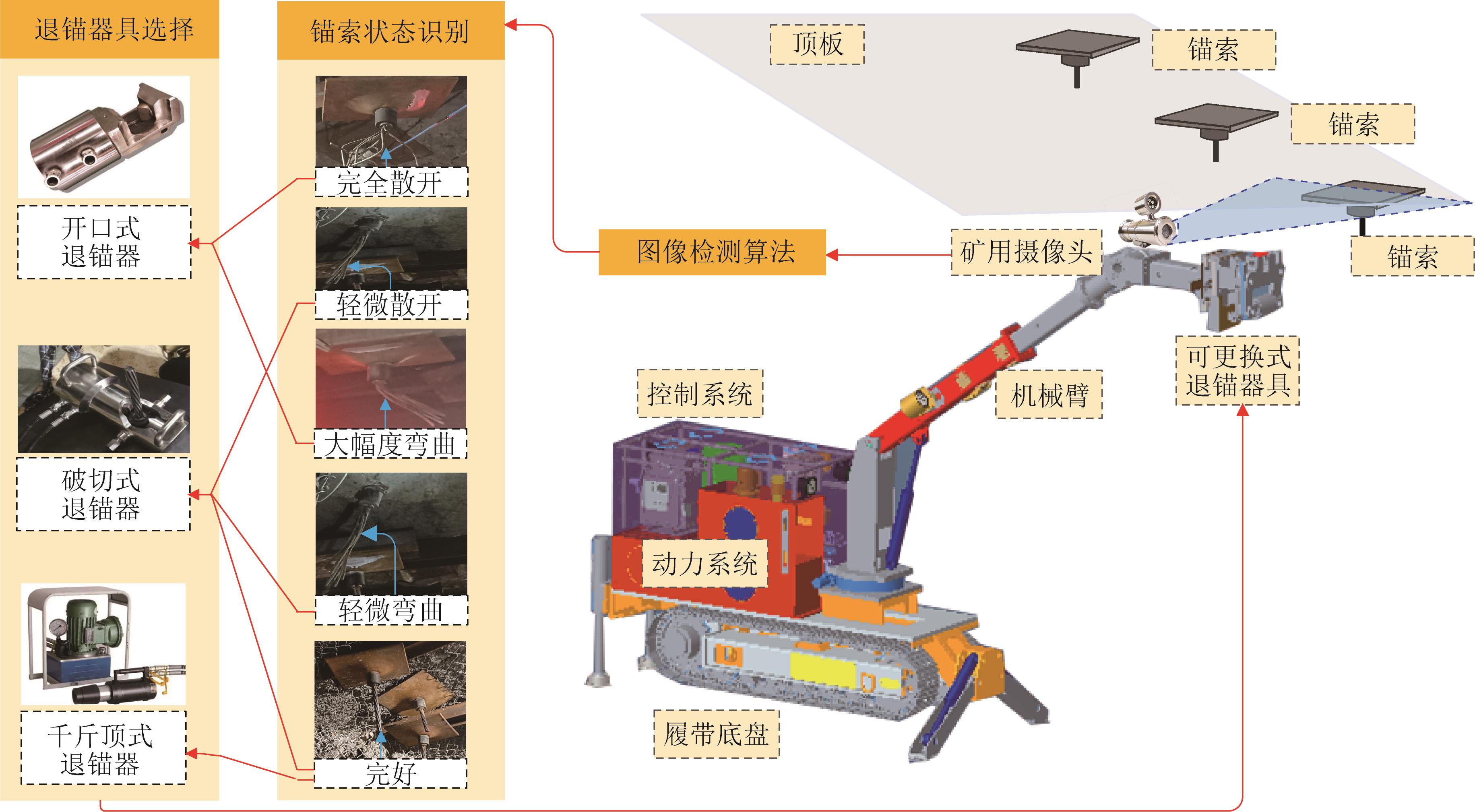
| 基于锚索状态图像识别的退锚机器人作业可行性判别 |
刘治翔1,2,庄源2( ),谢春雪3 ),谢春雪3 |
1.辽宁工程技术大学 矿产资源开发利用技术及装备研究院,辽宁 阜新 123000
2.辽宁工程技术大学 机械工程学院,辽宁 阜新 123000
3.辽宁工程技术大学 力学与工程学院,辽宁 阜新 123000 |
|
| Operation feasibility discrimination of anchor withdrawing robot based on anchor cable state image recognition |
| Zhixiang LIU1,2,Yuan ZHUANG2(),Chunxue XIE3 |
1.Research Institute of Mineral Resources Development and Utilization Technology and Equipment, Liaoning University of Engineering and Technology, Fuxin 123000, China
2.School of Mechanical Engineering, Liaoning University of Engineering and Technology, Fuxin 123000, China
3.School of Mechanics and Engineering, Liaoning University of Engineering and Technology, Fuxin 123000, China |
| [1] |
杨晓明. 采煤工作面端头三角区岩层弱化技术研究[J]. 矿业装备, 2024(2): 41-43.
YANG X M. Study on strata weakening technology in triangle area at the end of coal mining face[J]. Mining Equipment, 2024(2): 41-43.
|
| [2] |
郭海军, 冯志忠, 徐朝, 等. 大采高三角区坚硬顶板治理技术研究[J]. 中国煤炭, 2023, 49(S2): 272-276.
GUO H J, FENG Z Z, XU C, et al. Study on treatment technology of hard roof in triangle area with large mining height[J]. China Coal, 2023, 49(S2): 272-276.
|
| [3] |
崔计平. 矿用水切割机在煤矿退锚中的应用[J]. 机械管理开发, 2021, 36(7): 139-140.
CUI J P. Application of mine water cutting machine in coal mine anchoring[J]. Mechanical Management and Development, 2021, 36(7): 139-140.
|
| [4] |
伊永杰. 退锚装置在保德煤矿的应用[J]. 中国高新技术企业, 2016(26): 144-145.
YI Y J. Application of anchor withdrawing device in Baode coal mine[J]. China High-Tech Enterprises, 2016(26): 144-145.
|
| [5] |
赵垚庭, 张博, 李晋. 水力切割技术在退锚工序中的应用[J]. 山东煤炭科技, 2022, 40(7): 92-93, 99.
ZHAO Y T, ZHANG B, LI J. Application of hydraulic cutting technology in anchor withdrawal process[J]. Shandong Coal Science and Technology, 2022, 40(7): 92-93, 99.
|
| [6] |
管守军, 刘晟, 张凯辉. 麻家梁矿锚索破断机理研究及退锚创新应用[J]. 同煤科技, 2019(2): 37-40.
GUAN S J, LIU S, ZHANG K H. Study on breaking mechanism of anchor cable and innovative application of anchor removal in Majialiang Mine[J]. Science and Technology of Datong Coal Mining Administration, 2019(2): 37-40.
|
| [7] |
张德生, 任怀伟, 卞冀, 等. 综采工作面超前巷道自动化辅助作业技术现状与展望[J]. 矿山机械, 2020, 48(5): 1-6.
ZHANG D S, REN H W, BIAN J, et al. Present situation and prospect of automatic auxiliary operation technology used in advanced roadway of fully-mechanized mining face[J]. Mining & Processing Equipment, 2020, 48(5): 1-6.
|
| [8] |
张安宁, 叶国徽, 刘凯, 等. 锚杆退锚机锈死螺母破切器破切力分析[J]. 煤矿机械, 2012, 33(1): 101-102.
ZHANG A N, YE G H, LIU K, et al. Mechanical analysis for nut-breaking cutter of bolt unloader[J]. Coal Mine Machinery, 2012, 33(1): 101-102.
|
| [9] |
于进, 张东海. 矿用液压退锚车剖切机构优化设计[J]. 科技资讯, 2023, 21(24): 112-115.
YU J, ZHANG D H. Optimization design of the cutting mechanism of hydraulic anchor-unloading cars for mines[J]. Science & Technology Information, 2023, 21(24): 112-115.
|
| [10] |
刘建月, 崔小朝, 刘伟婧. Al2O3陶瓷环在锚具退锚中的应用研究[J]. 太原科技大学学报, 2015, 36(1): 68-71.
LIU J Y, CUI X C, LIU W J. Research on application of Al2O3 ceramic ring in anchorage system unload[J]. Journal of Taiyuan University of Science and Technology, 2015, 36(1): 68-71.
|
| [11] |
王晨灿, 李明. 基于YOLOv8的火灾烟雾检测算法研究[J]. 北京联合大学学报, 2023, 37(5): 69-77.
WANG C C, LI M. Research on fire smoke detection algorithms based on YOLOv8[J]. Journal of Beijing Union University, 2023, 37(5): 69-77.
|
| [12] |
WANG H Q, WANG B N, GE C. Reparameterized YOLOv8 pavement disease detection algorithm [J]. Computer Engineering and Applications, 2024, 60(5): 191-199.
|
| [13] |
王安静, 袁巨龙, 朱勇建, 等. 基于改进YOLOv8s的鼓形滚子表面缺陷检测算法[J]. 浙江大学学报(工学版), 2024, 58(2): 370-380, 387.
WANG A J, YUAN J L, ZHU Y J, et al. Drum roller surface defect detection algorithm based on improved YOLOv8s[J]. Journal of Zhejiang University (Engineering Science), 2024, 58(2): 370-380, 387.
|
| [14] |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas: IEEE Computer Society, 2016: 779-788.
|
| [15] |
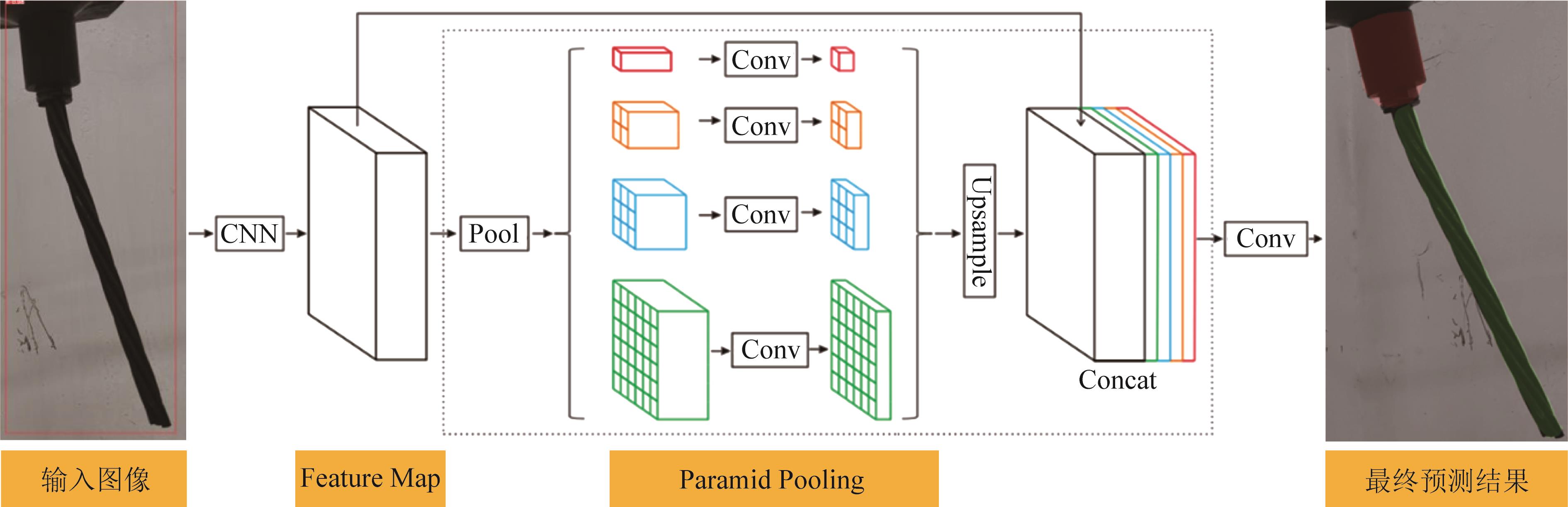
ZHAO H S, SHI J P, QI X J, et al. Pyramid scene parsing network[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas: IEEE Computer Society, 2017: 2881-2890.
|
| [16] |
FENG X M, WANG T P, YANG X H, et al. ConvWin-UNet: UNet-like hierarchical vision Transformer combined with convolution for medical image segmentation[J]. Mathematical Biosciences and Engineering, 2022, 20(1): 128-144.
|
| [17] |
董钊辰, 李涛, 刘忻. 大语言模型在低对比度图像识别中的应用与探索[J]. 软件, 2025, 46(9): 23-28, 36.
DONG Z C, LI T, LIU X. Application and exploration of large language model in low contrast image recognition[J]. Computer Engineering & Software, 2025, 46(9): 23-28, 36.
|
| [18] |
熊彬, 张双德. 基于改进PSPNet的卫星遥感图像建筑物语义分割算法[J]. 遥感信息, 2023, 38(4): 73-79.
XIONG B, ZHANG S D. Semantic segmentation algorithm for buildings in satellite remote sensing images based on improved PSPNet[J]. Remote Sensing Information, 2023, 38(4): 73-79.
|
| [19] |
郭浩然, 郭继昌, 汪昱东. 面向水下场景的轻量级图像语义分割网络[J]. 浙江大学学报(工学版), 2023, 57(7): 1278-1286, 1296.
GUO H R, GUO J C, WANG Y D. Lightweight semantic segmentation network for underwater image[J]. Journal of Zhejiang University (Engineering Science), 2023, 57(7): 1278-1286, 1296.
|
| [20] |
周中, 张俊杰, 龚琛杰, 等. 基于深度语义分割的隧道渗漏水智能识别[J]. 岩石力学与工程学报, 2022, 41(10): 2082-2093.
ZHOU Z, ZHANG J J, GONG C J, et al. Automatic identification of tunnel leakage based on deep semantic segmentation[J]. Chinese Journal of Rock Mechanics and Engineering, 2022, 41(10): 2082-2093.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|