Extracting hand articulations from monocular depth images using curvature scale space descriptors
|
Extracting hand articulations from monocular depth images using curvature scale space descriptors |
| Shao-fan WANG,Chun LI,De-hui KONG,Bao-cai YIN |
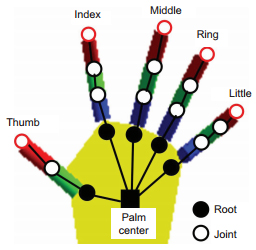
| Fig. 7 The hand model consists of fourteen cylinders and a plane, characterized by the three-dimensional coordinates of a palm center, five finger-roots, nine finger joints, and five fingertips |
|
|