1 大惯量专用转台控制系统组成及工作原理
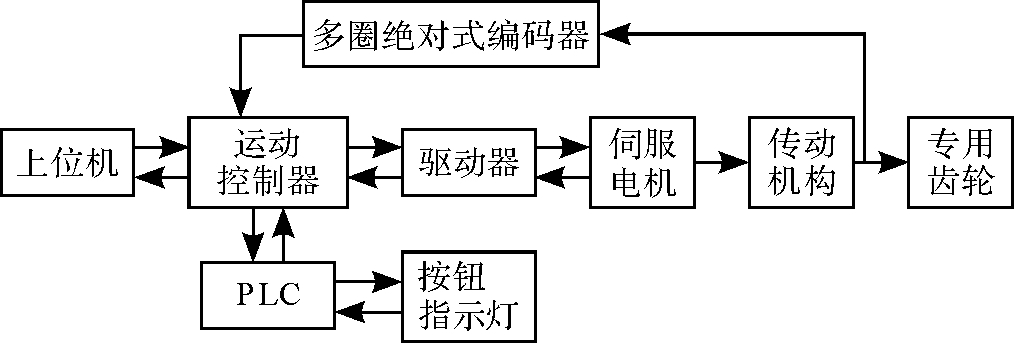
大惯量专用转台控制系统主要由上位机、运动控制器、可编程控制器(programmable logic controller, PLC)、驱动器、伺服电机、传动机构、多圈绝对式编码器以及专用齿轮等组成,转台控制系统总体结构组成如图1所示。

图1 大惯量专用转台控制系统总体结构组成
Fig. 1 Overall structure composition of control system for large inertia special turntable
转台控制系统的工作原理:上位机发送位置、方向以及速度指令给运动控制器,运动控制器将指令处理之后发送给驱动器,驱动伺服电机进行相应的转动,并经过传动机构减速之后带动专用齿轮转动,同时采集绝对式编码器数据,通过与设定角度比较,将差值运算处理后输出,以保证转台以一定精度快速到达指定位置。转台也可通过按钮进行手动控制,PLC采集相应按钮的开关量信号,并传递给TRIO MC403运动控制器进行相应控制。
转台控制系统相关硬件的介绍如表1所示。
2 大惯量专用转台控制系统建模及模糊控制器设计
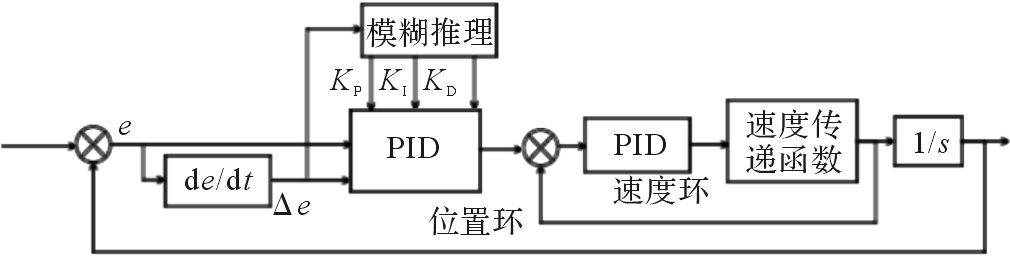
为保证大惯量专用转台控制系统的精度,整个控制系统采用闭环方式,由速度环和位置环串级构成,利用模糊规则对PID参数进行自整定。大惯量专用转台控制系统原理框图如图2所示。
2.1 大惯量专用转台控制系统建模
在大惯量专用转台控制系统运行过程中,很多因素(如负载质量、设备体积等)会影响转台的定位精度,从而影响导弹在姿态模拟测试中的精确性。电机作为动力源,驱动转台水平旋转,可以通过对驱动器的参数进行设置,结合传动机构的使用,使转台控制系统满足各个工况下的性能要求。对转台控制系统建立精确的数学模型,从而保证整个系统能够达到控制要求。
电压平衡方程:
式中:
电机轴的转矩平衡方程:
式中:
联立式(3)和(4)可得:
为简化运算过程,令:
式中:
联立式(1)至式(4)及式(6),消去中间变量,并进行拉普拉斯变换,求得:
通常情况下,伺服电机的电感
驱动器模型一般简化为一个比例环节,其比值为电机工作时的电压
传动机构模型可近视为一个比例环节,其比值为传动机构输出转速
式中:
本文主要研究大惯量对转台控制系统的影响,所以需要在建模时对转台总的转动惯量进行求解。
惯量产生的转矩Tj为:
式中:
系统惯性力产生的转矩Tg为:
式中:
系统在运行过程中,会受到阻尼力的作用,该力同样会对电机轴产生转矩。阻尼力大小与转台运动速度成正比,方向与转台运动方向相反,所以阻尼力折算到电机轴上产生的转矩为:
式中:为系统阻尼系数,为设备运行速度。
若不考虑摩擦力的影响,负载转矩为:
经拉普拉斯变换得:
联立式(15)与式(8)并求解,可得控制系统速度环的传递函数如式(16)所示,传递函数的输入为电枢电压,输出为转台专用齿轮的角位移。
由式(16)可知,转动惯量
2.2 模糊控制器设计
利用模糊自适应PID进行控制时,最重要的是找到PID控制 器的参数
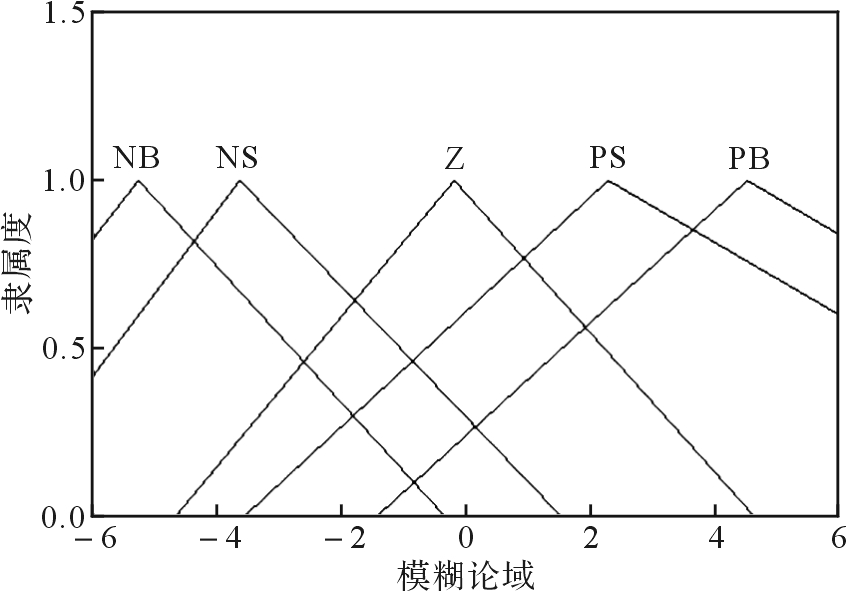
设二维模糊推理输入变量为
本文所设计的模糊规则如表2所示,如:If
表2 模糊规则表
Table 2 Fuzzy rule table
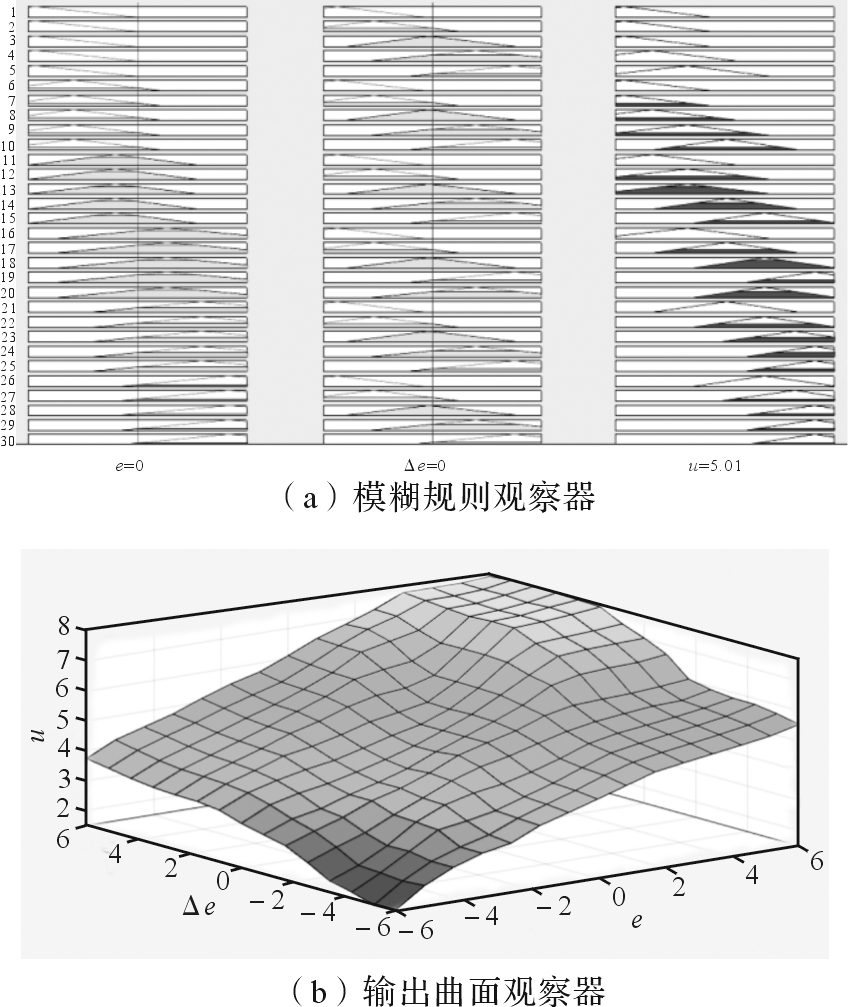
NB NM NS PS PM PB NB NB NB NM NS Z PS NS NB NB NS Z PS PM Z NB NM NS PS PM PB PS NM NS Z PM PB PN PS NS Z PS PB PB PB 根据设计的模糊规则,得到模糊控制器输出结果,如图4所示,其中:图4(a)为模糊规则观察器,通过它可以观察模糊推理图,并察看模糊推理系统的行为是否与预期的一致;图4(b)为输出曲面观察器,通过它可以观察推理系统的整个输出曲面。
3 大惯量专用转台控制系统仿真与实验分析
为验证基于全闭环+模糊自适应PID控制的高精度控制方法是否能够快速识别并调节系统PID参数以适应相应负载,达到缩短系统响应时间、减小系统振荡及提高转台系统控制定位精度的目的。根据前文所建立的数学模型,在MATLAB中构建转台控制系统的Simulink仿真模型。
在搭建控制系统Simulink仿真模型时,根据实际现场情况,选取的负载为2 000 kg,相应电机轴的转动惯量为4.42×1
0-3 kg·m2 ,水平旋转速度为15°/s(0.261 rad/s)。控制系统传递函数的参数如表3所示,代入式(16),可得:表3 转台控制系统传递函数的参数
Table 3 Parameters of transfer function of turntable control system
参数 数值 电枢电阻R/ 59 电枢电感L/mH 5.17 机电时间常数tm/ms 0.4 电机转矩系数Cm/ms 0.891 反电势系数Ce/ms 1.2 总转动惯量J/kg· m2 4.42×1 0-3 阻尼系数c 40 齿轮半径r/m 0.34 减速比i 228.75 根据速度环传递函数建立控制系统仿真模型,图5和图6分别为基于模糊自适应PID控制和普通PID控制的大惯量专用转台控制系统仿真模型。
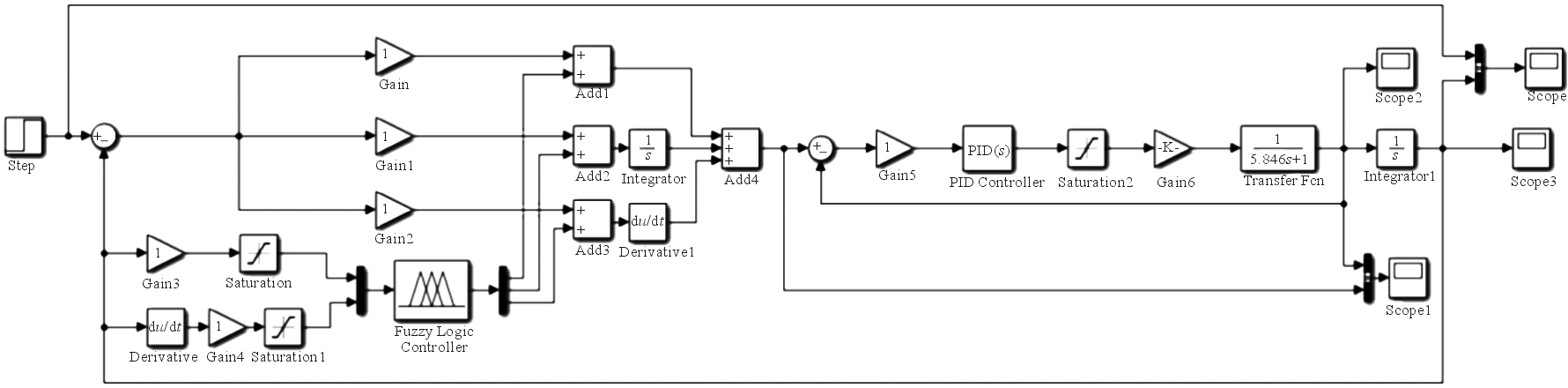
图5 基于模糊自适应PID控制的大惯量专用转台控制系统Simulink仿真模型
Fig. 5 Simulink simulation model of large inertia special turntable control system based on fuzzy adaptive PID control
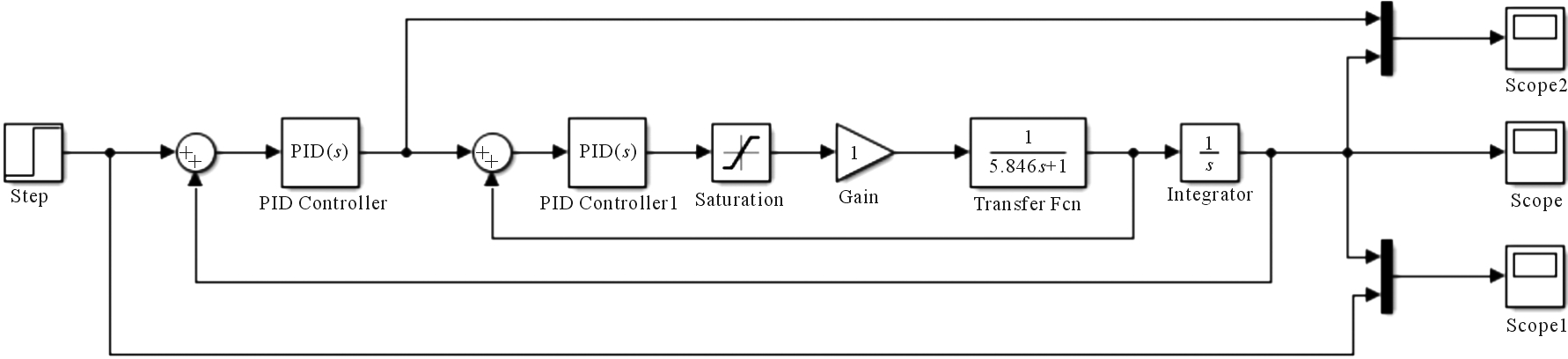
图6 基于普通PID控制的大惯量专用转台控制系统Simulink仿真模型
Fig. 6 Simulink simulation model of large inertia special turntable control system based on common PID control
图7所示为控制系统在单位阶跃响应下的速度控制效果对比。由图可知:模糊自适应PID控制在0.4 s内可加速到0.25 rad/s,普通PID控制需要0.7 s才能加速到0.25 rad/s,对比结果说明基于模糊自适应PID控制的响应速度远快于普通PID控制,这是因为模糊自适应PID控制具有很高的灵活性,可针对控制系统的不同状态迅速调整PID参数。在调节的起始阶段,模糊自适应PID控制通过增大
图7 控制系统在单位阶跃响应下的速度控制效果对比
Fig. 7 Comparison of speed control effect of the control system under the unit step response
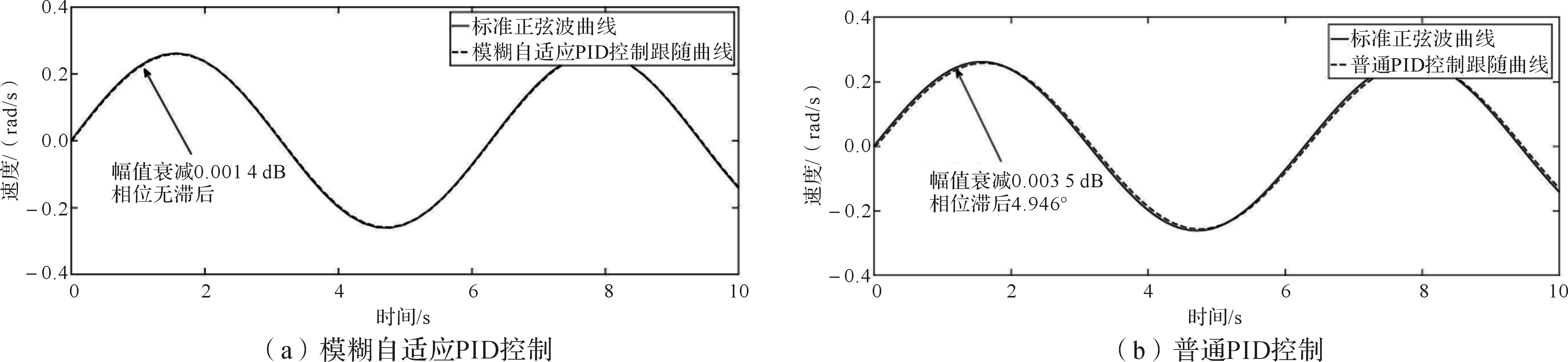
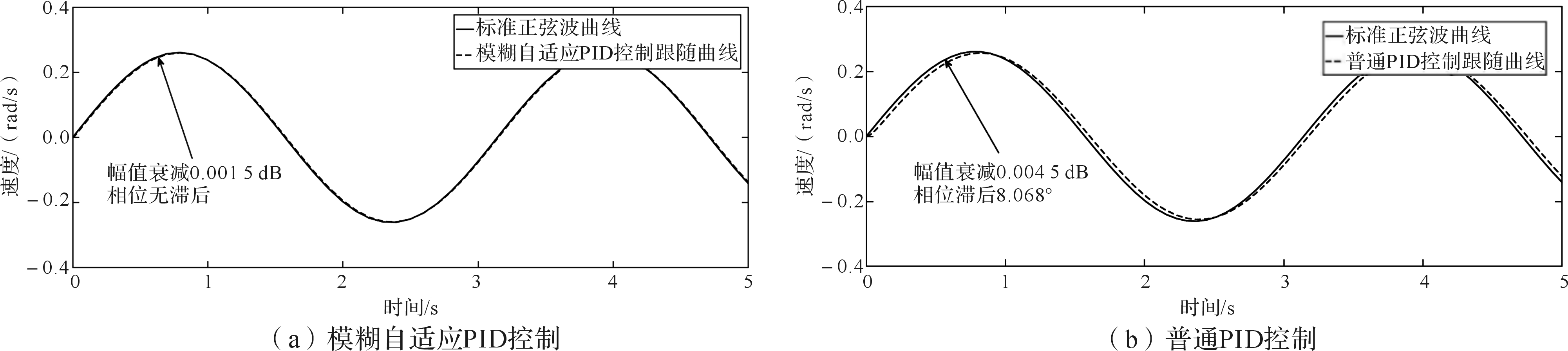
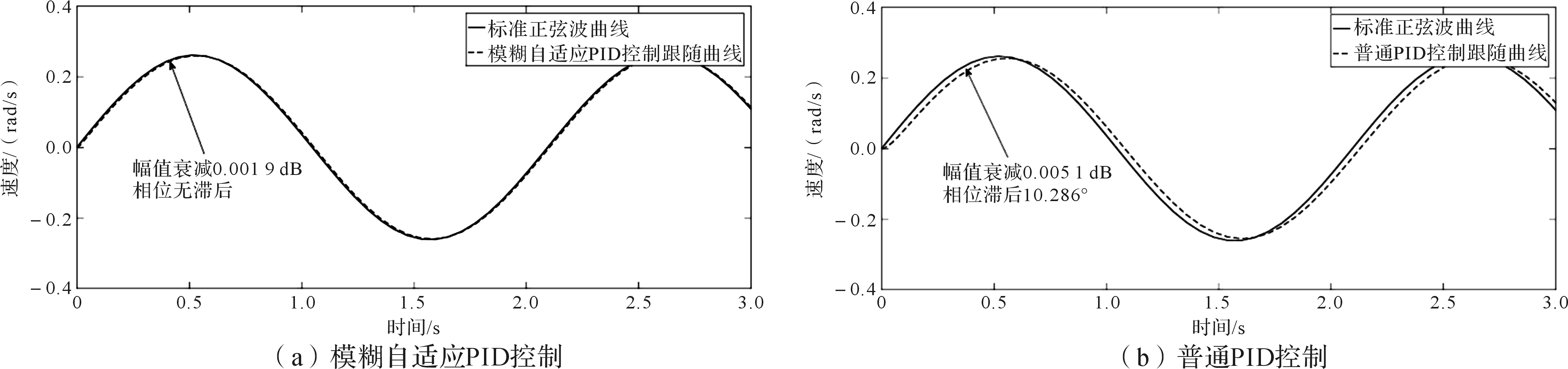
为验证2种控制方式下系统的跟随性能,在不同频率下进行了系统跟随仿真,图8,9和图10分别为1,2和3 Hz下2种控制方式的对比图。从图中可知:采用普通PID控制时,跟随曲线的幅值随着频率增大下降得比较明显,同时标准正弦波曲线与跟随曲线的相位差随着频率增大而增大,这是因为系统惯量比较大,系统速度环跟随性能较差;在加入模糊控制器后,系统的幅频特性得到了很大提升。
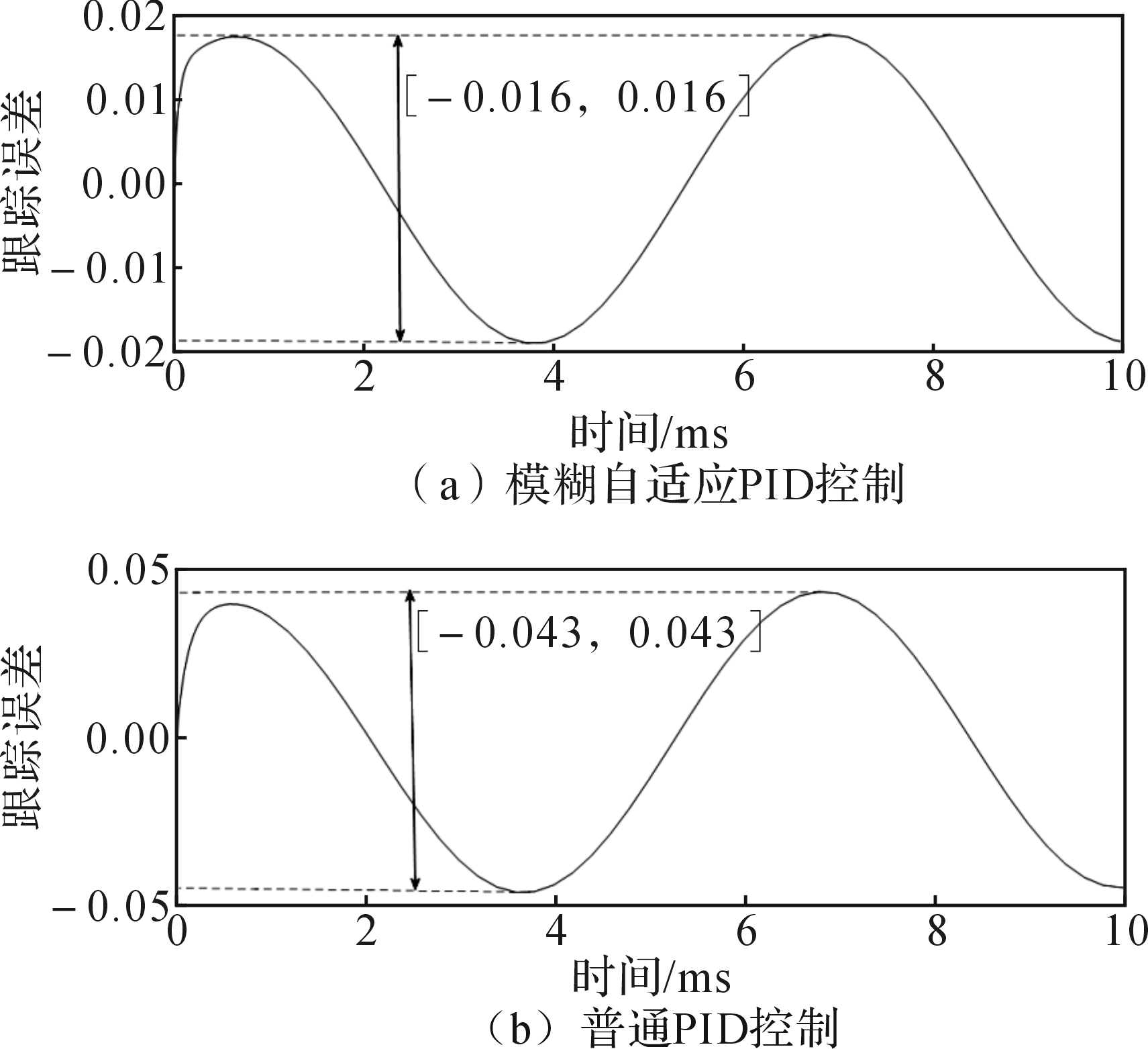
图 11为模糊自适应PID控制和普通PID控制下频率为1 Hz时系统的跟随误差曲线对比图。比较俩跟随误差曲线可得出:模糊自适应PID控制的跟随误差比普通PID控制降低70%,证明了模糊自适应PID控制的精确性和可行性。
图11 频率为1 Hz时控制系统跟随误差曲线对比
Fig. 11 Comparison of control system tracking error curves with frequency of 1 Hz
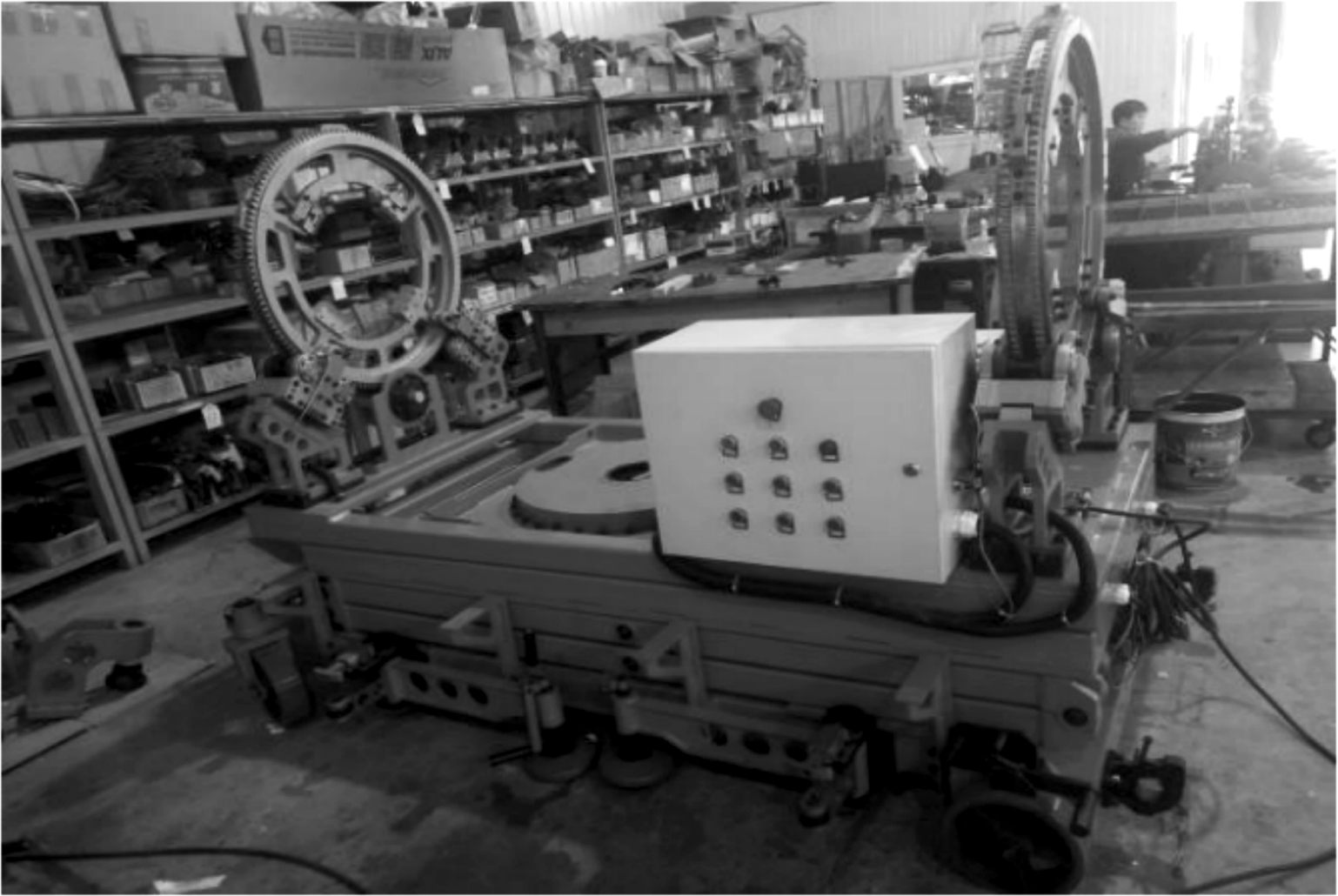
笔者依托科研项目的支持,搭建了相应的实验平台,如图12所示。通过上位机控制转台旋转相应的角度,利用FaroArm关节臂式三坐标测量仪对转台上的一个绕旋转中心旋转的平面进行测量,可以得到转台的实际旋转角度,三坐标测量仪的位置测量精度可达±3.5 μm,相应的角度精度为0.01°。表4为大惯量专用转台旋转角度给定值、实测值以及定位误差,由表4可知专用转台的实际定位精度在[-0.2°,0.2°]范围内。
表4 大惯量专用转台旋转角度及误差
Table 4 Rotation angle and its error of large inertia special turntable (°)
给定值 实测值及误差 正转 正转误差 反转 反转误差 -180 -180.12 -0.12 -179.88 0.12 -111 -109.98 0.12 -111.17 -0.17 -73 -72.89 0.11 -72.89 0.11 -40 -39.83 0.17 -39.89 0.11 0 -0.19 -0.19 -0.15 -0.15 30 30.15 0.15 30.19 0.19 40 39.89 -0.11 39.88 -0.12 90 89.85 -0.15 90.15 0.15 130 130.17 0.17 130.17 0.17 135 135.15 0.15 134.88 -0.12 160 160.16 0.16 160.15 0.15 4 结论
通过对大惯量专用转台控制系统的组成和工作原理进行分析,利用绝对式编码器作为位置环反馈元件,实现全闭环控制,并利用模糊自适应PID控制来提高整个控制系统的性能,以实现不同负载下的高精度控制。仿真结果表明:在确定系统转动惯量为4.42×1
0-3 kg·m2 ,水平旋转速度为0.261 rad/s的情况下,相对于普通PID控制,模糊自适应PID控制可使系统的响应速度提高75%,同时系统跟随误差降低了70%。实验结果表明,转台定位精度在[-0.2°,0.2°]范围内,满足了整个系统的设计要求([-0.5°,0.5°])。研究结果可为转台控制系统的设计提供有效的参考数据,促进了大惯量转台的高精度化发展。参考文献
- 1
黄令龙,郭阳宽,陈张玮,等.高精度伺服转台超低速控制[J].光学精密工程,2004,12(4):14-17. doi:10.3321/j.issn:1004-924X.2004.z2.004
HUANG Ling-long, GUO Yang-kuan, CHEN Zhang-wei, et al. Speed control for high precision two-axle servo system[J]. Optics and Precision Engineering, 2004, 12(4): 14-17.
- 2
黄令龙,郭阳宽,蒋培军,等.高精密伺服转台控制系统的设计[J].清华大学学报(自然科学版),2004,44(8):1054-1056. doi:10.3321/j.issn:1000-0054.2004.08.015
HUANG Ling-long, GUO Yang-kuan, JIANG Pei-jun, et al. Control system for high-precision turn table[J].Journal of Tsinghua University(Science and Technology), 2004,44 (8): 1054-1056.
- 3
韩江,王晓明,夏链,等.大惯量快速定位转台设计[J].机床与液压,2012,40(4):1-2,6. doi:10.3969/j.issn:1001-3881.2012.04.001
HAN Jiang, WANG Xiao-ming, XIA Lian, et al. Design of the large-inertia and quick-positioning turntable[J]. Machine Tool & Hydraulics, 2012, 40(4): 1-2, 6.
- 4
任志斌,刘今越,郭志红,等.基于模糊PID算法的高精度转台控制系统研究[J].机床与液压,2017,45(4):172-175. doi:10.3969/j.issn.1001-3881.2017.04.044
REN Zhi-bin, LIU Jin-yue, GUO Zhi-hong, et al. Research on control system for high accuracy turntable based on fuzzy PID strategy[J]. Machine Tool & Hydraulics, 2017, 45(4): 172-175.
- 5
解家顺,郭彦青,姚竹亭,等.基于前馈控制的高速大行程圆弧滑轨位置控制[J].工程设计学报,2018,25(1):62-70,78. doi:10.3785/j.issn.1006-754X.2018.01.009
XIE Jia-shun, GUO Yan-qing, YAO Zhu-ting, et al. Position control of high-speed large-stroke circular slide based on feedforward control[J]. Chinese Journal of Engineering Design, 2018, 25(1): 62-70, 78.
- 6
XU Kai, LÜ Yan, JIN Guang. Design of semi-physical simulation for small satellite by virtual display[J]. Applied Mechanics and Materials, 2012, 130-134: 2684-2687. doi:10.4028/www.scientific.net/AMM.130-134.2684
- 7
李宗.大惯量闭式回转系统工作特性研究[J].机床与液压,2015,43(9):154-157. doi:10.3969/j.issn.1001-3881.2015.09.044
LI Zong. Research on working performance for large inertia closed slewing system[J]. Machine Tool & Hydraulics, 2015, 43(9): 154-157.
- 8
刘锋,黄长征,罗昕,等.大惯量负载回转液压系统启制动平稳性的实验研究[J].液压与气动,2017(1):89-93. doi:10.11832/j.issn.1000-4858.2017.01.018
LIU Feng, HUANG Chang-zheng, LUO Xin, et al. Experimental study on start-up and braking stability for large inertia load slewing hydraulic system[J]. Chinese Hydraulics & Pneumatics, 2017(1): 89-93.
- 9
PENG Min. Semi physical simulation of diesel generator set rotational speed control[J]. Applied Mechanics and Materials, 2013, 389: 563-567. doi: 10.4028/www.scientific.net/AMM.389.563
- 10
董志明,徐欣圻,周旺.大惯量超低速高精度伺服系统的H∞控制[J].微计算机信息,2008,24(7-1):19-21. doi:10.3969/j.issn.1008-0570.2008.19.008
DONG Zhi-ming, XUN Xin-qi, ZHOU Wang. H-Infinity control for a super inertia, ultra-low speed and high precision servo system[J]. Microcomputer Information, 2008, 24(7-1): 19-21.
- 11
洪伟明,陈华凌.大惯量有轨输送车的精确定位控制[J].起重运输机械,2007(9):70-73. doi:10.3969/j.issn.1001-0785.2007.09.026
HONG Wei-ming, CHEN Hua-ling. Precise positioning control of large inertia railcars[J]. Hoisting and Conveying Machinery, 2007(9): 70-73.
- 12
刘付成,朱东方,宋婷,等.带大惯量运动部件卫星姿态高精度复合控制研究[J].上海航天,2016,33(6):53-60. doi:10.19328/j.cnki.1006-1630.2016.06.007
LIU Fu-cheng, ZHU Dong-fang, SONG Ting, et al. High precision attitude compound control for a satellite with large inertial moving parts[J]. Aerospace Shanghai, 2016, 33(6): 53-60.
- 13
JEONG Seok-Kwon, YOU Sam-Sang. Precise position synchronous control of multi-axis servo system[J]. Mechatronics, 2008, 18(3): 129-140. doi:10.1016/j.mechatronics.2007.10.009
- 14
赵旭东,邓皓,姚雪软.双位置闭环高精度、大惯量控制系统设计[J].自动化技术与应用,2017,36(4):21-24,50.
ZHAO Xu-dong, DENG Hao, YAO Xue-ruan. Design of double position loop for high precision and large inertia control[J]. Techniques of Automation and Applications, 2017, 36(4): 21-24, 50.
- 15
张建斌,王浩.一种框架式大负载旋转装置的结构设计与分析[J].航空精密制造技术,2015,51(3):5-8,12. doi:10.3969/j.issn.1003-5451.2015.03.002
ZHANG Jian-bin, WANG Hao. Structure design and analysis of frame type large load rotation device[J]. Aviation Precision Manufacturing Technology, 2015, 51(3): 5-8, 12.
- 16
张新华,黄建,张兆凯,等.大惯量下电动伺服机构非线性特性与控制方法研究[J].导航定位与授时,2017,4(2):41-47. doi:10.19306/j.cnki.2095-8110.2017.02.008
ZHANG Xin-hua, HUANG Jian, ZHANG Zhao-kai, et al. Research on nonlinear factor characteristics and control method on large inertia electromechanical actuator servo mechanism[J]. Navigation Positioning and Timing, 2017, 4(2): 41-47.
- 17
丛自龙,袁朝辉,杨芳.基于模糊自适应 PID控制的定位系统设计[J].机床与液压,2013,41(7):138-142. doi:10.3969/j.issn.1001-3881.2013.07.040
CONG Zi-long, YUAN Chao-hui, YANG Fang. Design of position system based on fuzzy adaptive PID control[J]. Machine Tool & Hydraulics, 2013, 41(7): 138-142.
- 18
葛红豆,赫雷,曹雏清,等.基于模糊PID控制的AGV控制[J].兵工自动化,2017,36(12):76-79. doi:10.7690/bgzdh.2017.12.018
GE Hong-dou, HE Lei, CAO Chu-qing, et al. AGV control based on fuzzy PID[J]. Ordnance Industry Automation, 2017, 36(12): 76-79.
- 19
程昊,胡洁,彭颖红.对焦运动的模糊PID控制方法[J].计算机应用与软件,2016,33(5):77-80. doi:10.3969/j.issn.1000-386x.2016.05.019
CHENG Hao, HU Jie, PENG Ying-hong. Fuzzy-PID control method for focus movement[J]. Computer Applications and Software, 2016, 33(5): 77-80.
- 20
CHENG Guo-yang, PENG Ke-mao, CHEN Ben M, et al. Discrete-time mode switching control with application to a PMSM position servo system[J]. Mechatronics, 2013, 23(8): 1191-1201. doi:10.1016/j.mechatronics.2013.10.007.
- 1
摘要
针对大惯量专用转台运行过程中存在的系统响应时间长、易产生振荡以及末端位置定位误差较大的问题,提出了一种基于全闭环+模糊自适应PID (proportion integral differential,比例积分微分)的精度控制方法。在大惯量专用转台执行机构处加入多圈绝对式编码器,以实现控制系统的全闭环;利用模糊自适应PID控制实现不同负载下高精度控制系统的快速调节。为更加深入研究大惯量对专用转台控制系统的影响,对转台进行了系统建模;同时在MATLAB仿真环境中分别建立了基于模糊自适应PID控制和普通PID控制的转台控制系统仿真模型,并搭建了转台测试平台进行验证实验。对比不同控制方式下系统控制性能的仿真结果可知:普通PID控制系统响应时间长,系统跟随误差大;而使用模糊自适应PID控制可使系统的响应速度提高75%,跟随误差降低降低70%。由实验结果可知专用转台定位精度为[-0.2°,0.2°],满足了设计精度要求。仿真和实验结果表明利用模糊自适应PID控制可有效提高系统的响应速度,全闭环控制可使系统的定位精度得到有效提高。研究结果为转台控制系统的设计提供了有效的参考数据,促进了大惯量转台的高精度化发展。
Abstract
In the process of running a large inertia special turntable, the system has some problems such as long response time, easy oscillation and large positional error at the end position, so a method based on full-closed loop + fuzzy adaptive PID (proportion integration differentiation) control is proposed. The multi-turn absolute encoder was added at the actuator of large inertia special turntable to achieve full-closed loop of the control system; the fuzzy adaptive PID control was used to achieve fast adjustment under different loads. In order to study the influence of large inertia on the control system further, a turntable model was established systematically. Turntable control system simulation models based on fuzzy adaptive PID control and common PID control were set up respectively in the MATLAB simulation environment, and turntable test platform was built for verification experiment.Comparing the simulation results of system control performance under different control methods, the common PID control system had a long response time and the system followed the error. The fuzzy adaptive PID control could increase the system response speed by 75% and the system’s following error reduced by 70%. The experimental results showed that the positional accuracy of the special turntable was [-0.2°, 0.2°], which satisfied the design accuracy requirement. By analyzing the simulation results and experimental results, the fuzzy adaptive PID control can effectively improve the system response speed, and the full closed-loop control also can effectively improve system positioning accuracy. The research result provides effective reference data for the design of the turntable control system and promotes high-precision development of large inertia turntable.
随着导弹、飞机等飞行器的迅速发展,其相关性能的测试也随之发展迅速,其中转台作为飞行器性能测试的重要工
针对变速大惯量转台控制精度低的问题,笔者提出了一种基于全闭环+模糊自适应PID(proportion integral differential,比例积分微分)控制的精度控制方法。采用TRIO MC403多轴运动控制器作为主控制器,实现转台位置和速度的控制以及各轴当前状态信息的采集;采用11位多圈绝对式编码器作为位置反馈元