1 轮式爬壁机器人机构设计
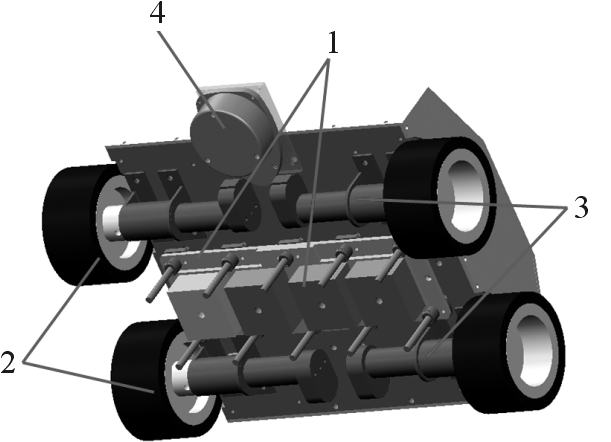
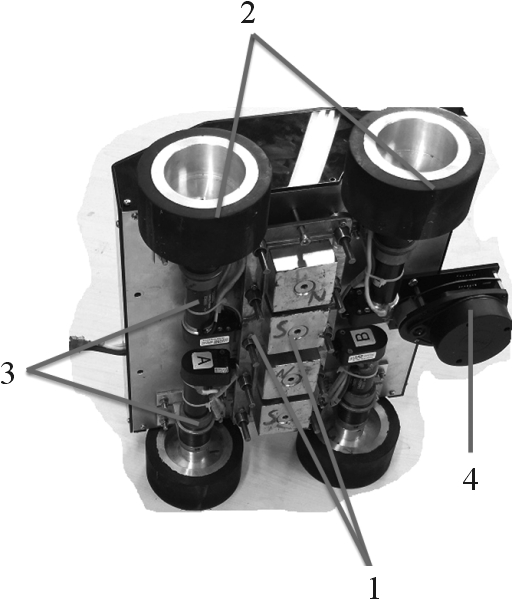
轮式爬壁机器人机械部分主要包括永磁吸附机构、驱动车轮、直流电机和激光雷达等,如图1所示,其中:4个驱动车轮与直流电机相连,固定于机器人底盘;永磁吸附机构位于机器人腹部,通过丝杠螺母实现上下调节,为了提高爬壁机器人吸附稳定性,永磁吸附材料选用高磁能积的钕铁硼N52。
2 轮式爬壁机器人驱动轮速度分析
以XgOgYg为惯性坐标系。假定轮式爬壁机器人的转向过程为三自由度的平面运
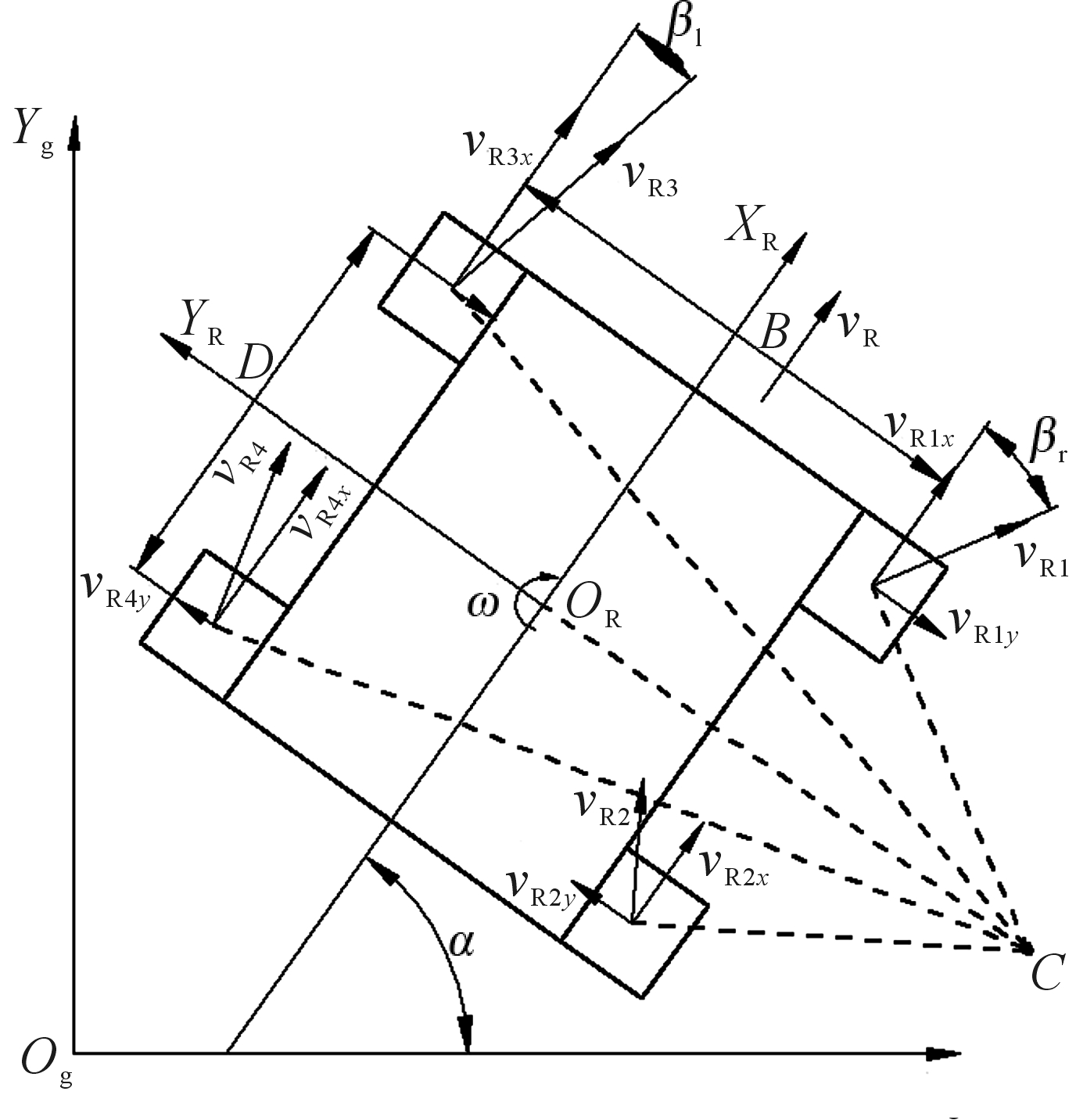
动[7,8,9,10,11] 。以XRORYR为机器人本体坐标系。本文所研制机器人顺时针转向如图2所示,其中OR为机器人的几何中心,爬壁机器人围绕瞬心C顺时针转动,B为爬壁机器人左、右驱动轮中心轴线之间宽度,D为爬壁机器人前后驱动轮中心轴线之间长度。规定前后两驱动轮以相同的转速进行转向;以下标1,2对应前、后右驱动轮,以下标3,4对应前、后左驱动轮。
如图2所示,四轮爬壁机器人顺时针转向时,左、右驱动轮接地部分相对于惯性坐标系XgOgYg作平面运动,其速度vR可分解为沿XR方向的速度vRx和沿YR方向的速度vRy。
取右驱动轮沿XR中心轴线上的微元dxR,则右驱动轮沿XR方向的速度和沿YR方向的速度为:
式中:νR1、νR2(下文νR3、νR4同)的分速度方向与XR和YR正方向同向;xR为驱动轮上所取的微元到机器人本体中心轴线的距离;R为转弯半径;ω为轮式爬壁机器人绕着旋转中心C转向的瞬时角速度,规定顺时针为其正方向。
同理,可得左驱动轮沿XR方向的速度和沿YR方向的速度为:
驱动轮速度方向与XR方向的夹角β称为侧偏
角[2,12] ,由图2可知其表达式为:其中:i=1,2; j=3,4。
3 轮式爬壁机器人静力学建模
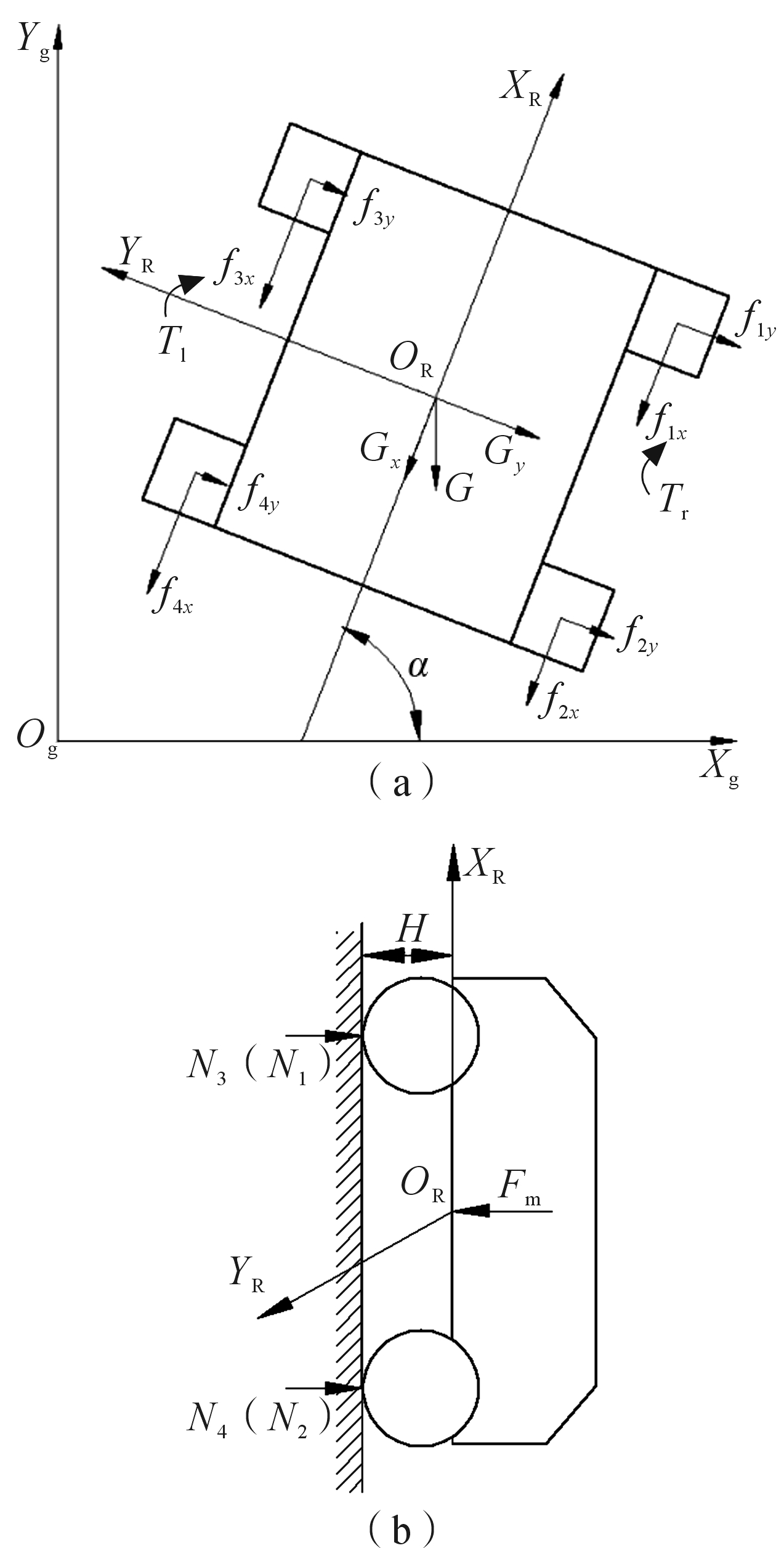
机器人以四轮全驱动在壁面上运动,其整体受力如图3所示:机器人本体重力G可分解为沿XR方向分力Gx和沿YR方向分力Gy;机器人4个驱动轮所受到的支持力分别为N1、N2、N3、N4;机器人所受到的磁吸附力为Fm;右侧电机驱动力矩为Tr,左侧电机驱动力矩为Tl;驱动轮所受横向(沿YR方向 )摩擦力为f1y、f2y、 f3y、 f4y,纵向摩擦力为f1x、 f2x、 f3x、 f4x;坐标平面XRORYR与壁面间的距离(两平行平面之间的距离)为H。
3.1 轮式爬壁机器人驱动轮支持力分析
磁吸附单元分布于爬壁机器人腹部,以集中力的方式作用于机器人本体。取机器人处于平衡状态时进行分析,可得驱动轮所受力的关系式:
式中:α为XR正方向与Xg正方向的夹角,FZR为ZR方向上的合力;MXR为XR方向上的合力矩。
爬壁机器人在磁吸附力Fm、重力G作用下,各驱动轮支持力满足:
为保证运动过程中爬壁机器人的安全性,须满足
3.2 轮式爬壁机器人摩擦力分析
根据Hertz接触理
论[13] ,轮式爬壁机器人与铅垂壁面为面接触,当一个直径为d1、长度为L1的圆柱体(车轮)和一个直径为d2、长度为L2的圆柱体(壁面)在磁吸附力Fm作用下发生接触时,其接触区为矩形,其宽度为2b,可得由于d2→∞,L=min(L1,L2),E=2×1
09 Pa,为等效弹性模量[12] ,故公式(6)可简化为:由于橡胶皮厚度很小,且内轮毂为实心铝棒,因此假定4个驱动轮接触段矩形宽度相等。
基于精准控制考虑,假定爬壁机器人处于纯滚动状态,且在铅垂壁面上转向时单个驱动轮接地部分所受压力在轴线方向上均匀分
布[14,15,16,17,18,19] 。因此驱动轮与壁面接触部分的摩擦力与驱动轮速度方向相反,且驱动轮所受压力沿XR方向的分布为:
前右驱动轮绕着瞬心C作顺时针圆周运动,在其接地部分沿XR方向中心轴线上取一微元dxR,则该微元摩擦力df1大小与q1成正比,方向与速度vR1相反,则沿XR方向分力为:
因此,前右驱动轮的纵向摩擦力为:
其中:
式中:
将式(11)进行积分,得:
则前、后右驱动轮的纵向摩擦合力frx为:
同理前、后左驱动轮的纵向摩擦力合力flx为:
因此纵向摩擦阻力力矩为:
爬壁机器人前、后驱动轮沿YR方向的横向摩擦力fqy、fby可根据汽车轮胎摩擦力学中的简化刷子模
型[12] 求出,具体表达式为:(17)
式中:
根据式(17)和式(18)可计算出横向摩擦阻力力矩为:
4 轮式爬壁机器人动力学建模
轮式爬壁机器人的电机轴与驱动轮用紧定螺钉刚性连接,且在铅垂壁面上匀速顺时针转向。在机器人本体坐标系XRORYR下进行爬壁机器人动力学分析,由牛顿-欧拉公式可得:
式中:M为机器人负载质量;Fl为左侧驱动力,Fr为右侧驱动力,规定沿XR正方向为正;
由于本文机器人进行匀速圆周转向且沿行进速度方向不打滑,因此有:
将上述所计算的表达式代入式(20),则可得:
5 轮式爬壁机器人动力学仿真
采用MATLAB分析爬壁机器人动力学模型在不同磁吸附力作用下的接地段长度,不同转弯半径所对应的驱动轮速度,以及不同转弯半径、磁吸附力和负载质量所对应的驱动力矩。考虑到爬壁机器人的负载质量,以及底板应能够承压而不出现形变,具体仿真参数设置如表1所示。
表1 轮式爬壁机器人动力学仿真参数设置
Table 1 Dynamics simulation parameter setting for wheeled wall-climbing robot
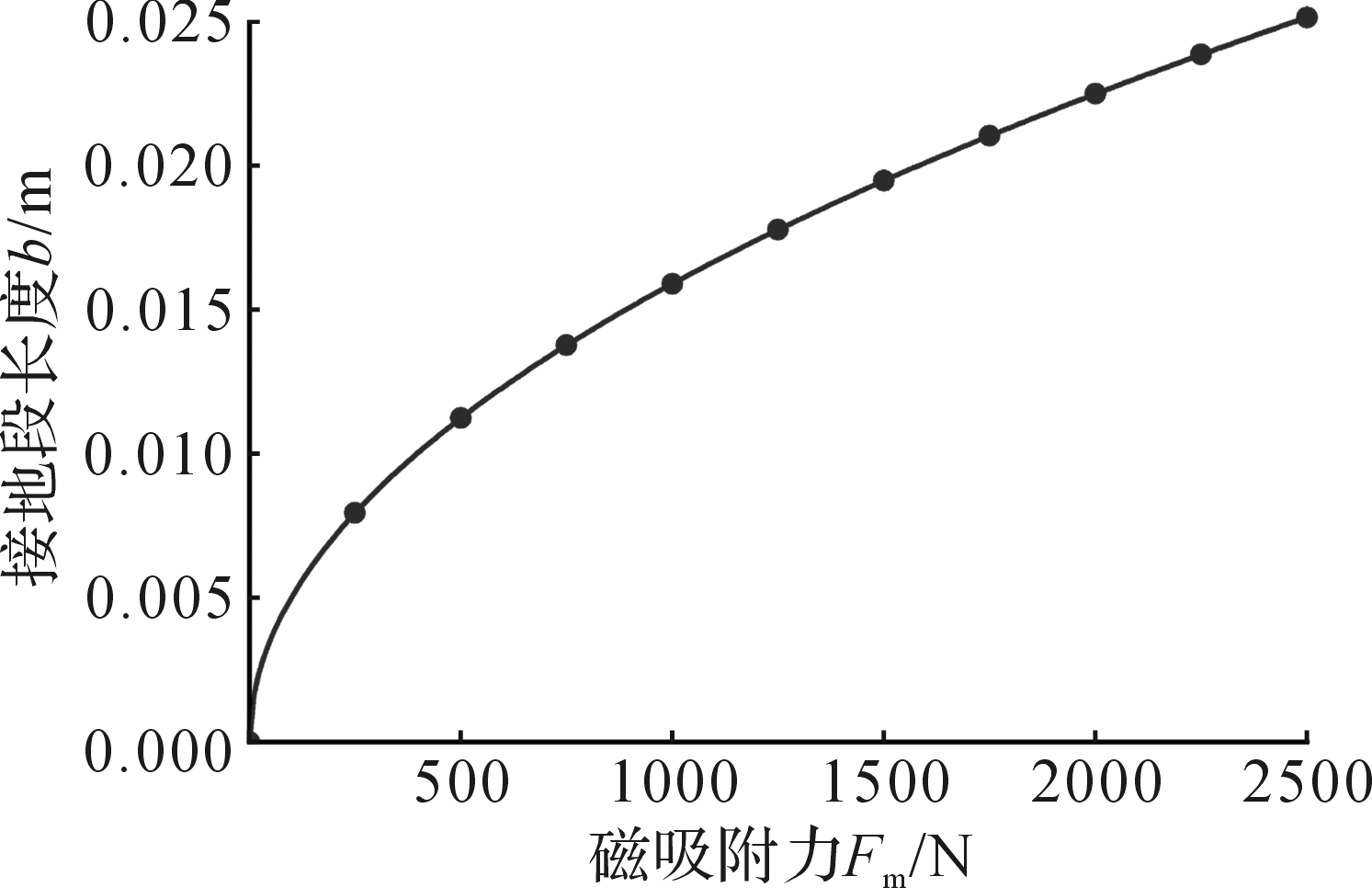
参数 车轮直径d/mm 轮中心轴宽度B/mm 轮中心轴长度D/mm 转向摩擦系数μ 轮子宽度L/mm 重心高度H/mm 电机额定力矩T/N·m 数值 100 300 300 0.1 50 65 9 图4为在不同吸附力作用下,驱动轮与铅垂壁面接触长度(即接地段长度b)的变化曲线。可以看出,随着磁吸附力Fm增大,接地段长度b逐渐增大。

图4 不同磁吸附力下驱动轮接地段长度的变化曲线
Fig. 4 Variation curve of grounding length of the driving wheel under different magnetic adsorption forces
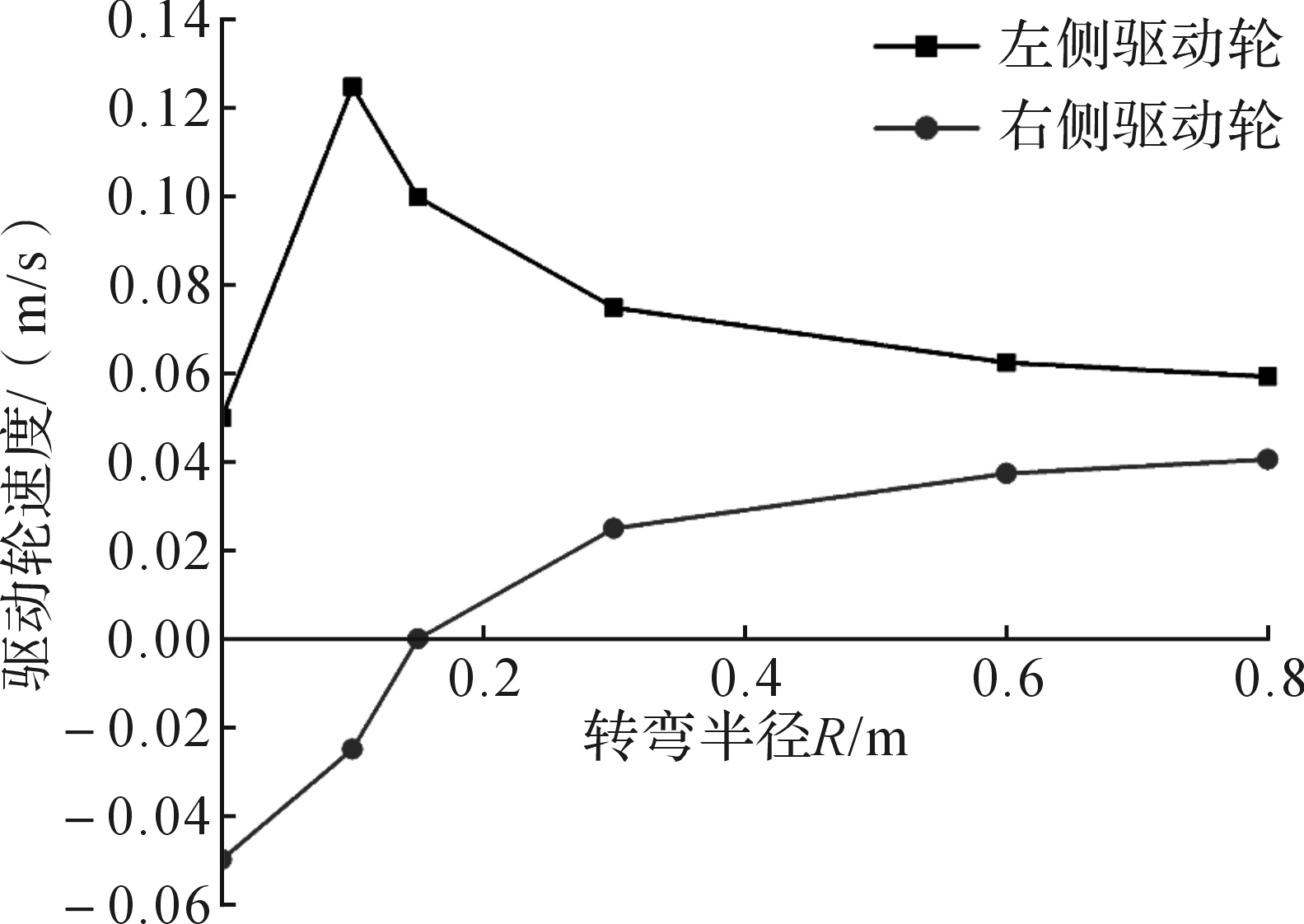
图5为磁吸附力Fm=1 000 N,负载质量M=21 kg时,不同转弯半径所对应的驱动轮速度,可以看出:右侧驱动轮速度随着转弯半径R的增大而增大;左侧驱动轮速度随着转弯半径R的增大而减小。由图可知原地转向(R=0 m)时,左侧驱动轮速度沿XR方向的分量vlx=0.05 m/s,右侧驱动轮速度沿XR方向的分量vrx= -0.05 m/s;紧急制动转向(R=B/2=0.15 m,即右侧驱动轮不转动,左侧驱动轮向右转)时,vlx=0.1 m/s,vrx=0 m/s;大半径转向(R=0.3 m)时,vlx=0.075 m/s,νrx=0.025 m/s。
图5 磁吸附力Fm=1 000 N,负载质量M=21 kg时不同转弯半径对应的驱动轮速度
Fig. 5 Driving wheel speed corresponding to different turning radii with magnetic adsorption force of 1 000 N and load weight of 21 kg
机器人匀速顺时针转动,其初始位置为α=0°,基于作业的检测效率,机器人工作速度定为νR=0.05 m/s。根据上文建立的理论方程,分别计算机器人左、右侧驱动力矩在不同转弯半径、磁吸附力和负载质量作用下的变化曲线。
图6为吸附力Fm=900 N,负载质量M=15 kg时,不同转弯半径所对应的驱动力矩。图6(a)为左侧驱动力矩变化值,可以看出:转弯半径越大,其对应的驱动力矩幅值越大;当R=0.8m时,驱动力矩幅值达到所选电机额定力矩9 N·m。图6(b)为右侧驱动力矩变化值,可以看出右侧驱动力矩变化趋势与左侧的一致。这是因为机器人在铅垂壁面上需要克服重力G进行转向;但当R=0 m时,总体力矩为一定值,这是由于原地转向的驱动力矩差与重力G无关,只与磁吸附力Fm有关。从图6还可以看出:在相同磁吸附力和负载质量情况下,原地转向(R=0 m)所需驱动力矩最小;紧急制动转向(R=B/2=0.15 m,即右侧驱动轮不转动,左侧驱动轮顺时针转动)所需驱动力矩最大且远远超过了电机额定力矩,因此应尽量避免出现。故本文机器人转向方式选为原地转向(R=0 m)。
图6 磁吸附力Fm=900 N,负载质量M=15 kg时不同转弯半径所对应的驱动力矩
Fig. 6 Driving torque corresponding to different turning radii with magnetic adsorption force of 900 N and load weight of 15 kg
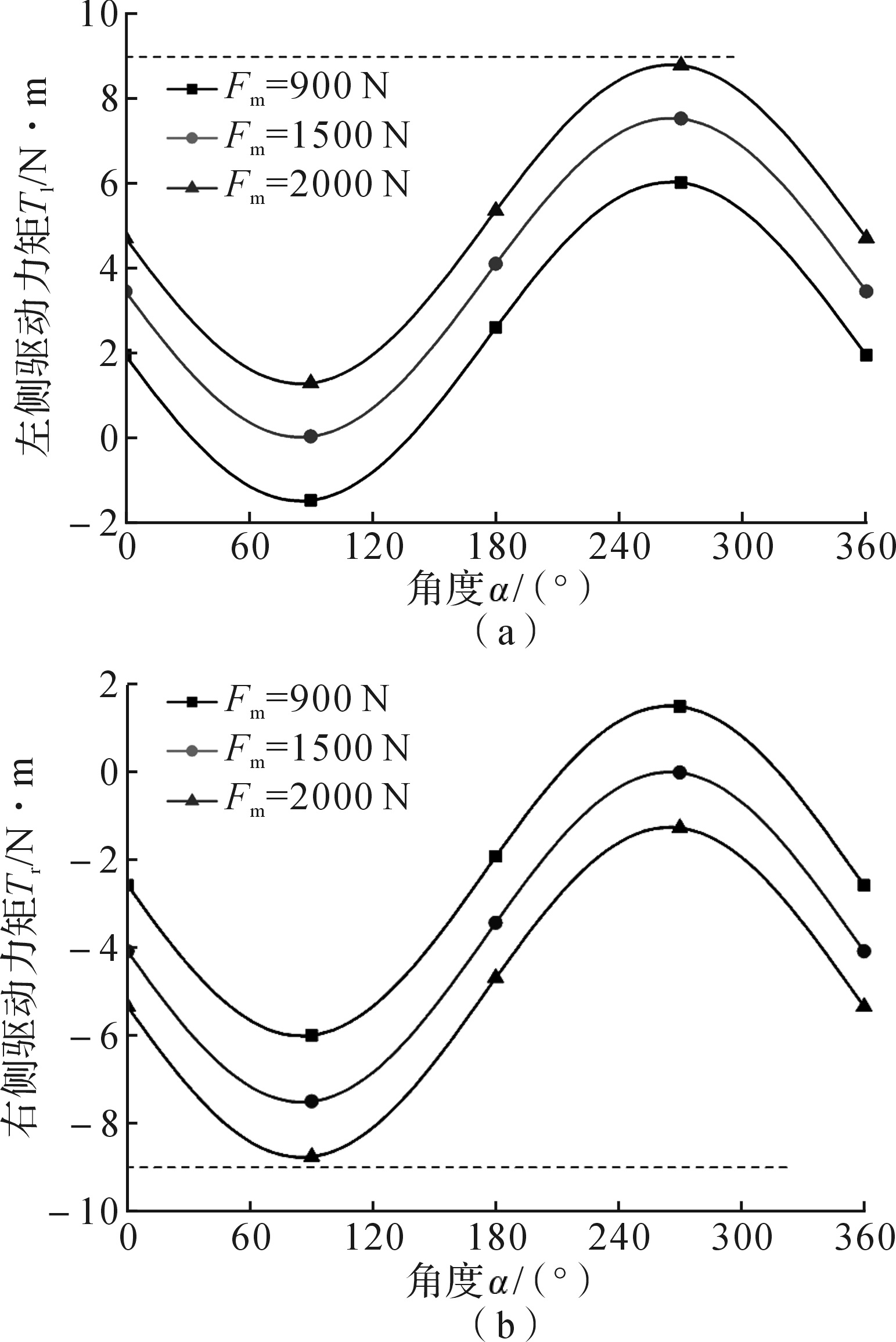
图7为转弯半径R=0 m,负载质量M=15 kg时,不同磁吸附力所对应的驱动力矩。从图7(a)可以看出:左侧驱动力矩随着磁吸附力的增大而变大;当磁吸附力Fm=2 000 N时,左侧驱动力矩最大值达到所选电机额定力矩9 N·m;从图7(b)可以看出:随着磁吸附力增大,相同相位下右侧驱动力矩幅值与左侧驱动力矩幅值不同,且差值为定值,这是由于转向过程中在Fm作用下左、右驱动轮的摩擦阻力矩不同。
图7 转弯半径R=0 m,负载质量M=15 kg时不同磁吸附力所对应的驱动力矩
Fig. 7 Driving torque corresponding to different magnetic adsorption forces with turning radius of 0 m and load weight of 15 kg
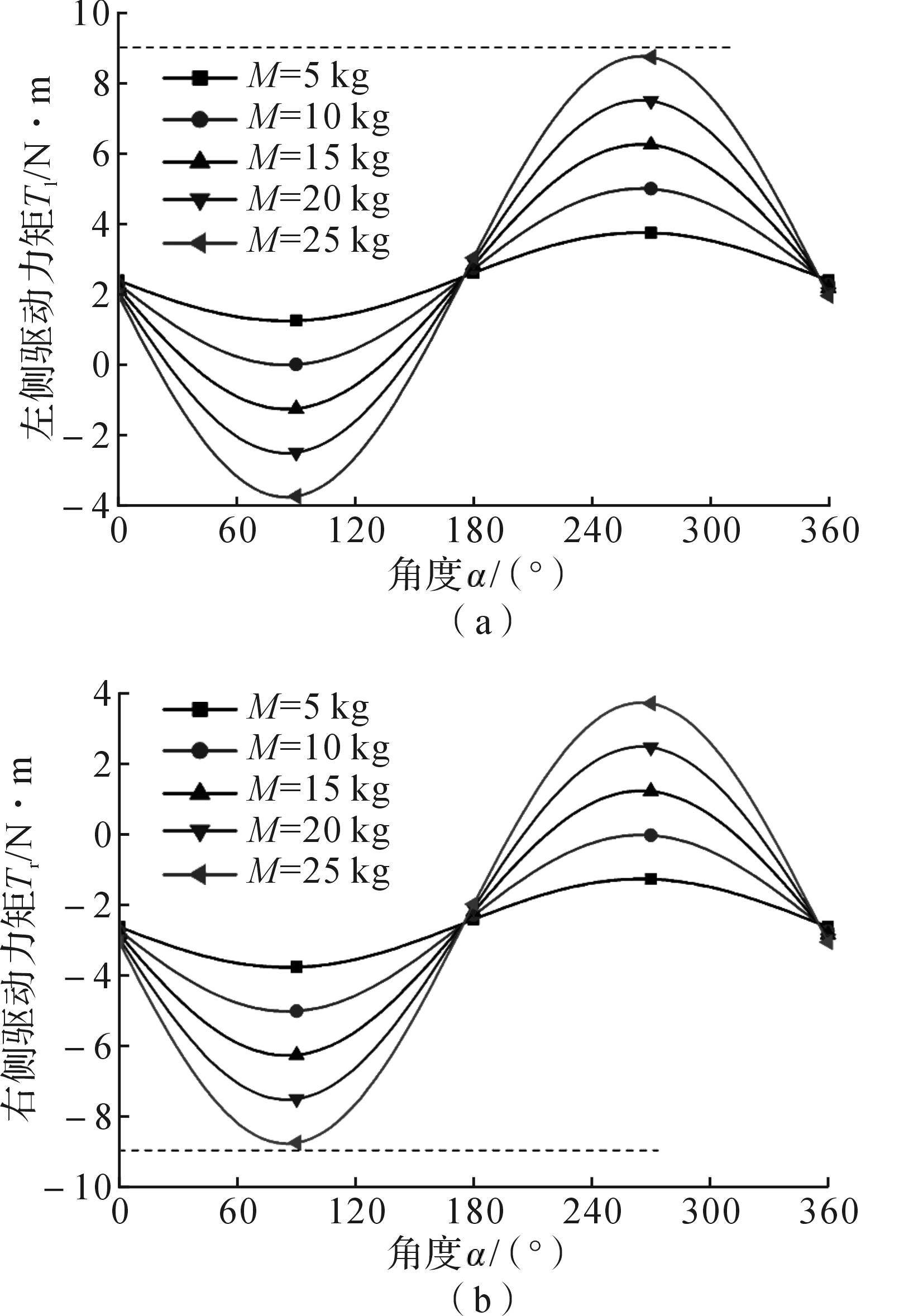
图8为驱动轮原地转向(R=0 m),磁吸附力Fm=1 000 N时,不同负载质量M所对应的驱动力矩。从图8(a)可以看出左侧驱动力矩幅值会随着负载质量M的增大而增大,且当M=27 kg时达到所选电机额定驱动力矩9 N·m;从图8(b)可以看出:相同相位下,右侧驱动力矩幅值与左侧驱动力矩不同,这是由于在Fm作用下左、右驱动轮的摩擦阻力矩不同。当α=0°、180°和360°时,两侧驱动力矩均会相交于一点,这是由于该位置横向摩擦力平衡了重力Gy,因此机器人处于该位置时只受Fm的影响。
图8 转弯半径R=0 m,磁吸附力Fm=1 000 N时不同负载质量所对应的驱动力矩
Fig. 8 Driving torque corresponding to different load weights with turning radius of 0 m and magnetic adsorption force of 1 000 N
综上所述,基于驱动力矩最小和续航能力最大,本文选用原地转向方式且最大磁吸附力控制在1 000 N。
6 轮式爬壁机器人转向稳定实验
图9为本文所研制的轮式爬壁机器人样机,其总质量为15 kg;磁吸附材料采用4块50 mm×50 mm×25 mm的矩形NFeB-N52,按N-S-N-S开路方式布置,固定在8 mm厚的矩形DT-4C纯铁板上,形成磁回路。
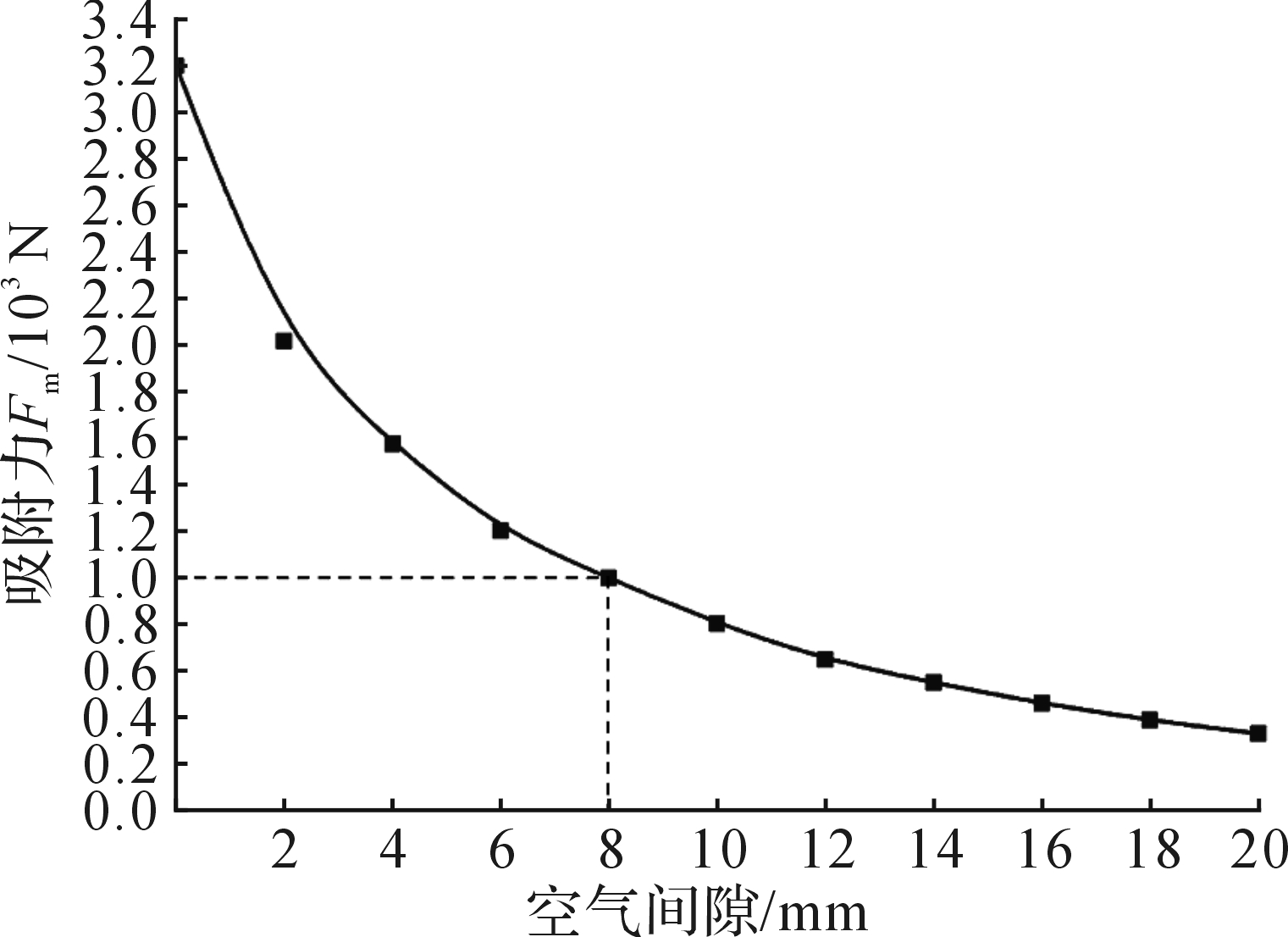
压力传感器布置在4个轮子下部,通过调节丝杠,使得磁吸附机构上下运动,测出不同空气间隙所对应的磁吸附力Fm,其变化曲线如图10所示,磁吸附力Fm会随着空气间隙增大而减小。由于转向过程力矩值无法直接测得,因此本文基于公式
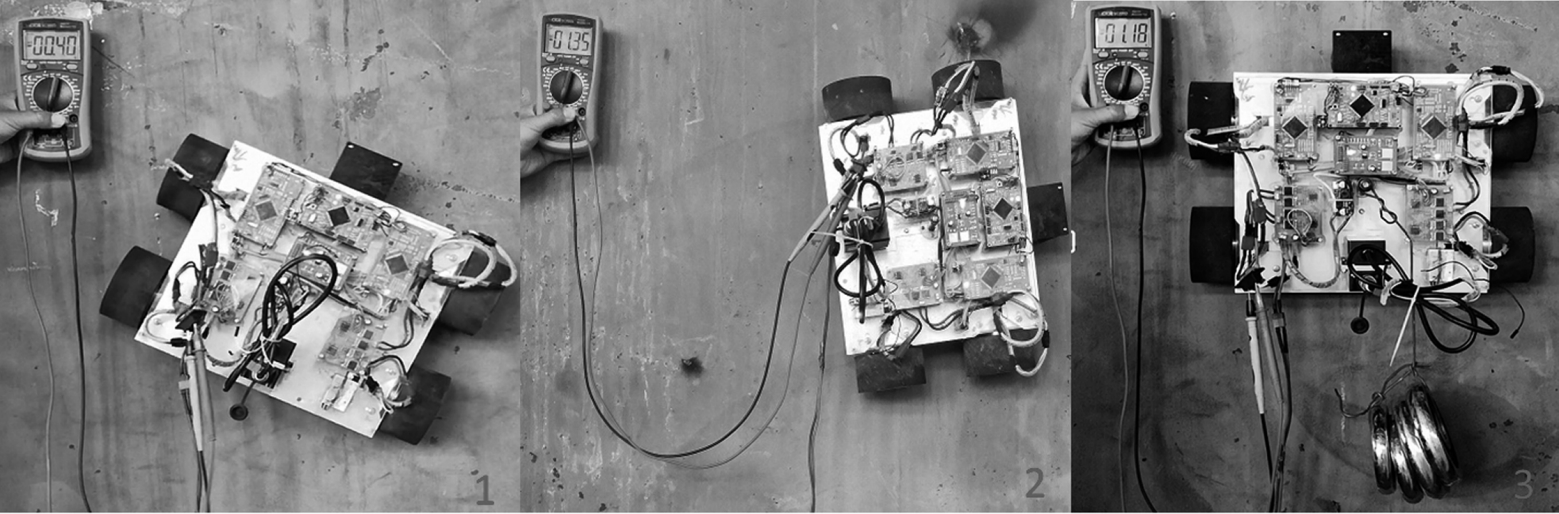
如图11,爬壁机器人初始位置为α=0°,分别测得转向转弯半径R=0,0.6 m,磁吸附力Fm=1 000,1 500 N,负载质量M=15,21 kg时的左右侧电机瞬时电流。由于没有数据采集卡,无法测得实时转角α所对应的瞬时电流,因此通过测量4个特殊角度(α=0°,90°,180°,270°)所对应的瞬时电流值对数值计算规律进行验证,测量结果如表2至表4所示,其中试验电压值为整个转向过程驱动板的平均电压值,为8.5 V。表中力矩值为正代表机器人顺时针转动。
图11 爬壁机器人转向实验现场
Fig. 11 The steering experiment site of the wall climbing robot
注:1—转向半径为0 m; 2—转向半径为0.6 m; 3—负载质量为21 kg
表2 磁吸附力Fm=1 000 N,负载质量M=21 kg时不同转弯半径所对应的电机测量值
Table 2 The motor measurement value corresponding to different turning radii with magnetic adsorption force of 1 000 N and load weight of 21 kg
转弯半径R/ m 转角α/(°) 左侧瞬时
电流/A
左侧测量驱
动力矩/N·m
左侧仿真驱
动力矩/N·m
右侧瞬时
电流/A
右侧测量驱
动力矩/N·m
右侧仿真驱
动力矩/N·m
0 0 0.30 2.550 2.179 5 0.35 -2.975 -2.830 9 90 0.12 -1.020 -1.244 8 0.66 -5.610 -6.255 2 180 0.35 2.975 2.830 9 0.30 -2.550 -2.179 5 270 0.66 5.610 6.255 2 0.12 -1.020 1.244 8 0.6 0 1.10 7.440 6.516 5 0.27 3.130 3.481 9 90 0.34 2.300 2.582 3 0.01 -0.116 -0.084 0 180 1.00 6.760 6.148 2 0.28 3.247 3.850 1 270 1.52 10.280 10.082 3 0.60 6.960 7.416 0 从表中可以看出,左右侧驱动力矩的测量值与仿真值基本吻合,但存在误差,考虑到测量的误差和公式本身的误差,因此是可以接受的。结果表明:转弯半径R=0 m(原地转向),左、右驱动轮速度为0.05 m/s且方向相反,吸附机构与壁面间隙为8 mm,理论最佳磁吸附力1 000 N能满足爬壁机器人稳定吸附在壁面上,转向时不会出现滑落。当空气间隙为8 mm时,对应吸附机构最佳磁吸附力为1 000 N。
7 结论
1)基于转向过程中四轮爬壁机器人与铅垂壁面相互作用的摩擦力线性积分模型,推导出该过程中驱动轮接触处摩擦力和转向阻力矩方程。
2)研究了大半径转向、小半径和原地转向三种转向方式,基于同等负载质量和磁吸附力条件下电机驱动力矩最小,得出了原地转向为最优方式。
表3 转弯半径R=0 m,负载质量M=21 kg时不同磁吸附力所对应的测量值
Table 3 The motor measurement value corresponding to different magnetic adsorption forces with turning radius of 0 m and load weight of 21 kg
磁吸附力
Fm/N
转角α/(°) 左侧瞬时
电流/A
左侧测量驱
动力矩/N·m
左侧仿真驱
动力矩/N·m
右侧瞬时
电流/A
右侧测量驱
动力矩/N·m
右侧仿真驱
动力矩/N·m
1 000 0 0.30 2.550 2.179 5 0.35 -2.975 -2.830 9 90 0.12 -1.020 -1.244 8 0.66 -5.610 -6.255 2 180 0.35 2.975 2.830 9 0.30 -2.550 -2.179 5 270 0.66 5.610 6.255 2 0.12 -1.020 1.244 8 1 500 0 0.35 2.975 3.435 7 0.50 -4.250 -4.087 7 90 0.00 0.000 0.011 7 0.93 -7.905 -7.517 7 180 0.50 4.250 4.087 7 0.35 -2.975 -3.435 7 270 0.93 7.905 7.511 7 0.00 0.000 -0.011 7 3)通过仿真分析得出了轮式爬壁机器人转向过程中的最佳磁吸附力,与试验样机磁吸附力进行对比,结果表明:当转弯半径R=0 m,左、右驱动轮速度方向相反,大小相同且为0.05 m/s时,所需驱动力矩最小;电机额定驱动力矩为9 N·m时,所对应的吸附力为1 000 N,符合实验样机在空气间隙为8 mm的磁吸附力值。
参考文献
- 1
崔宗伟,孙振国,陈强,等.两端吸附式焊缝修形爬壁机器人研制[J].机器人,2016,38(1):122-128. doi: 10.13973/j.cnki.robot.2016.0122
CUI Zong-wei, SUN Zhen-guo, CHEN Qiang, et al. Development of removable welded wall-mounting robots at both ends[J]. Robot, 2016, 38(1): 122-128.
- 2
闻靖,顿向明,缪松华,等.变磁力吸附爬壁机器人的结构设计与爬越焊缝特性[J].机器人,2011,33(4):405-410. doi: 10.3724/SP.J.1218.2011.00405
WEN Jing, DUN Xiang-ming , LIAO Song-hua, et al. Structural design and weld seam surmounting characteristics of a wall-climbing robot with variable magnetic adsorption force device[J]. Robot, 2011, 33(4): 405-410.
- 3
ESPINOZA R V, OLIVEIRA A S D, ARRUDA L V R D., et al. Navigation’s stabilization system of a magnetic adherence-based climbing robot[J]. Journal of Intelligent & Robotic Systems, 2015, 78(1): 65-81.
- 4
钱志源,付庄,赵言正,等.一种在驱动轮打滑情况下爬壁机器人动力学建模方法[J].上海交通大学学报,2007,41(6):857-860. doi: 10.3321/j.issn:1006-2467.2007.06.001
QIAN Zhi-yuan, FU Zhuang, ZHAO Yan-zheng,et al. A approach of dynamic modeling of wheeled wall-climbing robot with wheel slip[J]. Journal of Shanghai Jiaotong University, 2007, 41(6): 857-860.
- 5
衣正尧,弓永军,王祖温,等.新型船舶壁面除锈爬壁机器人动力学建模与分析[J].机械工程学报, 2010,46(15):23-30. doi: 10.3901/JME.200.15.023
YI Zheng-yao, GONG Yong-jun, WANG Zu-wen, et al. Dynamic modeling and analysis on a new type wall-climbing robot for ship wall rust removal[J]. Journal of Mechanical Engineering, 2010, 46(15): 23-30.
- 6
岳荣刚,王少萍.一种爬壁机器人的动力学建模[J].北京航空航天大学学报,2013,39(5):641-644.
YUE Rong-gang, WANG Shao-ping. Dynamic modeling for a climbing robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(5): 641-644.
- 7
HUANG H, LI D, XUE Z, et al. Design and performance analysis of a tracked wall-climbing robot for ship inspection in shipbuilding[J]. Ocean Engineering, 2017, 131: 224-230. doi: 10.1016/j.oceaneng.2017.01.003
- 8
NAM S, OH J, LEE G, et al. Dynamic analysis during internal transition of a compliant multi-body climbing robot with magnetic adhesion[J]. Journal of Mechanical Science and Technology, 2014, 28(12): 5175-5187. doi: 10.1007/s12206-014-1141-z
- 9
LU Y, ZHOU K, YE N. Design and kinemics/dynamics analysis of a novel climbing robot with tri-planar limbs for remanufacturing[J]. Journal of Mechanical Science & Technology, 2017, 31(3): 1427-1436. doi: 10.1007/s12206-017-0243-9
- 10
NIU G, LI T, WANG L. Mechanism design of the inspection robot for aircraft fuel tank[J]. Advances in Mechanical and Electronic Engineering, 2012, 12(10): 197-202. doi: 10.1007/978-3-642-31507-7_33
- 11
YAN W X, ZHOU H F, ZHAO Y Z, et al. The modeling and simulation of kinetic analysis of nonholonomic systems for the omni-directional wall-climbing robot[C]// International Conference on Intelligent Robotics and Applications, New York: Springer-Verlag, 2013: 16-32. doi: 10.1007/978-3-642-40849-6_2
- 12
JACOB Svendenius , MAGNUS Gäfvert . A semi-empirical dynamic tire model for combined-slip forces[J]. Vehicle System Dynamics, 2006, 44(2): 189-208. doi:10.1080/00423110500385659
- 13
桂仲成,陈强,孙振国,等.爬壁机器人的轮式移动机构的转向功耗[J].清华大学学报,2008,48(2):161-164.doi: 10.3321/j.issn:1000-0054.2008.02.002
GUI Zhong-cheng, CHEN Qiang, SUN Zhen-guo, et al. Turning power losses in the wheeled locomotion mechanism for wall climbing robot[J]. Journal of Tsinghua University, 2008, 48(2): 162-163.
- 14
程军伟,高连华,王红岩.基于打滑条件下的履带车辆转向分析[J].机械工程学报,2006,42(S1):192-195.
CHENG Jun-wei, GAO Lian-hua, WANG Hong-yan. Steering analysis of tracked vehicles based on skid condition[J]. Journal of Mechanical Engineering, 2006, 42(S1): 192-195.
- 15
SCHMIDT D, BERNS K. Advanced motion control for safe navigation of an omni-directional wall-climbing robot[J]. Informatik Aktuell, 2012, 12(5): 137-145. doi: 10.1007/978-3-642-32217-4_15
- 16
万振,高峰,丁靖,等.多轴车制动的动力学模型及制动性能分析[J].中国机械工程,2008,19(3):365-369. doi: 10.3321/j.issn:1004-132X.2008.03.027
WAN Zhen, GAO Feng, DING Jing, et al. Dynamics model and braking performance analysis of multi-axle vehicle[J]. China Mechanical Engineering, 2008, 19(3): 365-369.
- 17
丁良宏,王润孝,冯华山,等.浅析BigDog四足机器人[J].中国机械工程,2012,23(5):5-14. doi: 10.3969/j.issn.1004-132X.2012.05.001
DING Liang-hong, WANG Run-xiao, FENG Hua-shan, et al. Brief analysis of BigDog quadruped robot[J]. China Mechanical Engineering, 2012, 23(5): 5-14.
- 18
刘清友,李雨佳,任涛,等.主动螺旋驱动式管道机器人[J].机器人,2014,36(6):711-718. doi: 10.13973/j.cnki.robot.2014.0711
LIU Qing-you, LI Yu-jia, REN Tao, et al. An active helical drive in-pipe robot[J]. Robot, 2014, 36(6): 711-718.
- 19
赵燕江,张永德,姜金刚,等.基于MATLAB的机器人工作空间求解方法[J].机械科学与技术,2009,28(12):1657-1661.
ZHAO Yan-jiang, ZHANG Yong-de, JIANG Jin-gang, et al. A method for solving robot workspace based on MATLAB[J]. Mechanical Science and Technology, 2009, 28(12): 1657-1661.
- 1
摘要
针对四轮爬壁机器人在铅垂壁面上转向失稳的问题展开研究。首先,基于机器人驱动轮与铅垂壁面相互作用的赫兹接触理论,提出了一种机器人摩擦力模型,利用线性积分算法求解出机器人驱动轮转向过程中的纵向摩擦力、横向摩擦力和转向阻力矩;然后,通过机器人动力学建模,推导出转向过程中的驱动力矩关系式,并利用MATLAB仿真得出不同转弯半径、不同磁吸附力和不同负载质量所对应的驱动力矩值随转向角近似呈正弦变化趋势。最后,进行了机器人转向稳定实验,结果显示驱动力矩的实测值与仿真值基本吻合。仿真和实验结果表明,控制转弯半径为0 m、调节磁吸附力为1 000 N和限定最大负载质量为27 kg,能够保证机器人转向稳定,有效解决轮式爬壁机器人转向失稳的问题。研究结果可为四轮爬壁机器人的路径规划和转向稳定性控制提供理论依据。
Abstract
It is launching a research on the instable problem of the four-wheel wall-climbing robot during the steering process on the vertical wall. First of all, based on the Hertz contact theory that the robot driving wheels interacted with the vertical wall, a friction model for robot was proposed, and then the longitudinal friction, lateral friction and turning resistance torque during the whole steering process of robot driving wheel were solved by using the linear integral algorithm. Furthermore, the dynamics model was used to derive the driving torque relation. The torque values that corresponded to different turning radii, different magnetic adsorption forces and different load weights were calculated by the MATLAB software, which were approximately sinusoidal with the steering angles.Finally, the steering stability experiment of the robot was carried out,and the results showed that the measured and simulated values of the driving torque were basically in agreement. Simulation and experimental results indicated that, when controlling the turning radius to 0 m, adjusting the adherence-based force to 1 000 N and limiting the maximum load weight to 27 kg, the steering stability of the robot could be guaranteed and the instable problem of robot during the steering process could be effectively solved. The study results provide the theoretical foundation for path planning and the steering stability control of four-wheel wall-climbing robot.
当前,针对石油和化工行业采用人工作业的方式对大型储罐进行检测与维护存在效率低、成本高和安全隐患大等问题,提出使用自动化机器人代替人工作业。其中磁吸附轮式爬壁机器人因运动灵活、易于控制等特点,具有广阔的工程应用前景,而成为研究热
文献[4]认为变磁力轮式爬壁机器人驱动轮与铁磁性铅垂壁面相互作用的摩擦力为纯滚动摩擦力,并建立了机器人壁面运动时的运动学与动力学方程;文献[5]提出一种新型履带式爬壁机器人转向过程的动力学模型,并分析了它在船体上的上爬能力;文献[6]建立了一种City-Climb履带式小型爬壁机器人的动力学方程,通过仿真分析模拟了机器人的运动状态。磁吸附轮式爬壁机器人在检测过程中由于磁吸附力不足、电机驱动力矩过载和转弯半径过大等,易造成滑移、吸附不稳定等现象,影响路径规划和定位并最终导致漏检与作业危险。但是,以上研究没有分析爬壁机器人转向时,磁吸附力和转弯半径与电机转矩之间的关系,其中磁吸附力将直接影响爬壁机器人稳定吸附,转弯半径将直接影响驱动电机功耗。因此,磁吸附力和转弯半径是保证爬壁机器人转向稳定性的关键因素。
本文研究了轮式爬壁机器人在非直线运动(转向)过程中其磁吸附力、转弯半径、负载质量与驱动力矩的关系,根据机器人受力情况推导了其动力学方程,并利用 MATLAB计算出驱动力矩随转向角的变化值。最后通过机器人转向稳定实验,验证理论计算正确性。