1 大型机场草坪割草机器人系统
本文研究的大型机场草坪割草机器人系统总体框图如图1所示,主要包括割草机器人本体、控制器、地面监控站和地面遥控器等。割草机器人本体是一种四轮移动机器人结构,采取前轮转向、后轮驱动方式,采用油电混合驱动模式,车体无法原地无半径转弯,割台悬挂于车体中央下方,割台高度可以通过调节电机在割草高度范围内自由调整。控制器主要负责传感器的信息采集、故障检测与处理、与外部硬件的通信以及控制指令的解算,并将解算得到的指令下传给电机驱动板。大型机场草坪割草机器人有2种控制方式:地面遥控模式和自主运行模式,这2种模式可以自由切换。其中:地面遥控模式用于实现割草机器人进出库,快速到达割草区域等;自主运行模式用于完成无人化割草作业,割草人员可在地面监控站监控割草机器人的运行状况。
2 大型机场草坪割草机器人路径规划及轨迹跟踪控制算法设计
2.1 割草机器人路径规划算法设计
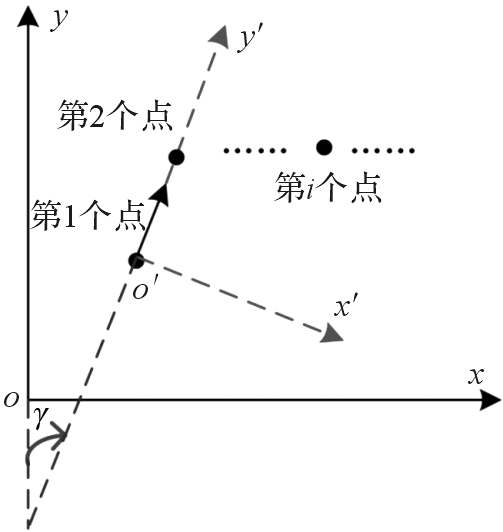
大型机场草坪割草机器人路径规划采取划定多边形工作区域方式,自主行走主要采用直线方式(除转向)。割草机器人通过GPS采集工作区域边界位置坐标,得到多边形区域的边界顶点以及边界直线方程(所设定的多边形工作区域内角不大于180°,否则将它切分为2个多边形)。为简化后续算法,以多边形的第1个点为该工作区域的坐标原点,第1个点和第2个点的连线为y' 轴,它与平面地球坐标系的变换关系如图2所示,坐标变换公式如下:

图2 平面地球坐标系与工作区域坐标系变换示意图
Fig. 2 Schematic diagram of transformation between plane earth coordinate system and working area coordinate
式中:xi和yi为第i个点在平面地球坐标系o-xy中的坐标值,
迂回式规划路径形式统一且简单,可使割草机器人的运动易于控制,并且机器人能量消耗最少,对割草机器人来说是最优路径规划方法。传统迂回式路径规划是指割草机器人以直线方式沿规划路径行走,至草坪边界后掉头,然后沿反方向直线行走,如此反复迂回,直到整个区域被覆盖。但是,本文所设计的大型机场草坪割草机器人存在最小转弯半径,且最小转弯半径大于割台宽度的一半,如果按照传统迂回式路径规划算法进行路径规划,会导致割草机器人在转向区大面积漏割。因此,笔者提出往返直线型路径规划算法使大型草坪割草机器人完成割草作业。
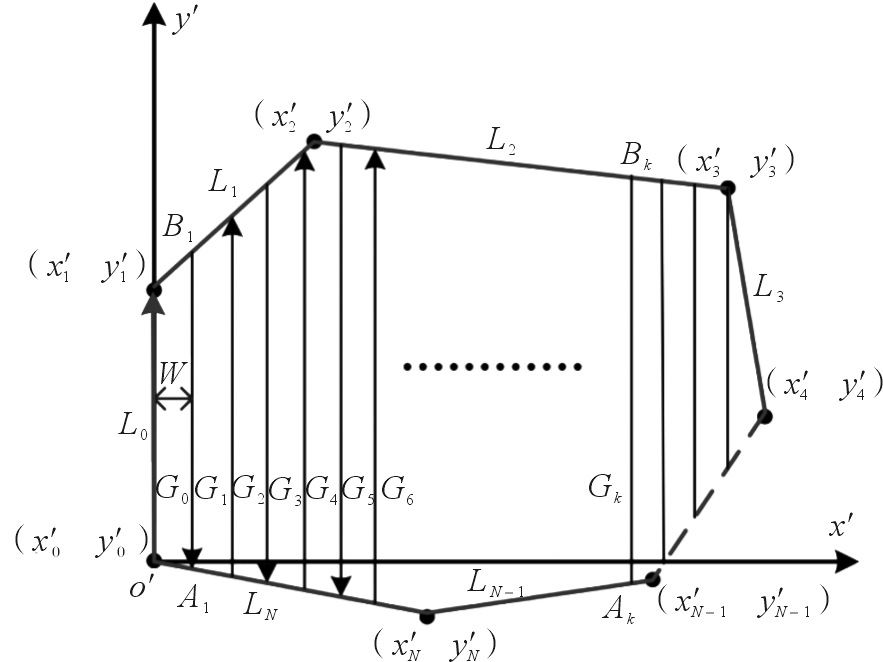
假设已运用GPS采集获得多边形工作区域的边界点信息,并按照公式(1)完成了坐标变换计算,获得了各点在区域坐标系中的坐标:
1)如果j≤N-1,则直线方程为:
2)如果j=N,则直线方程为:
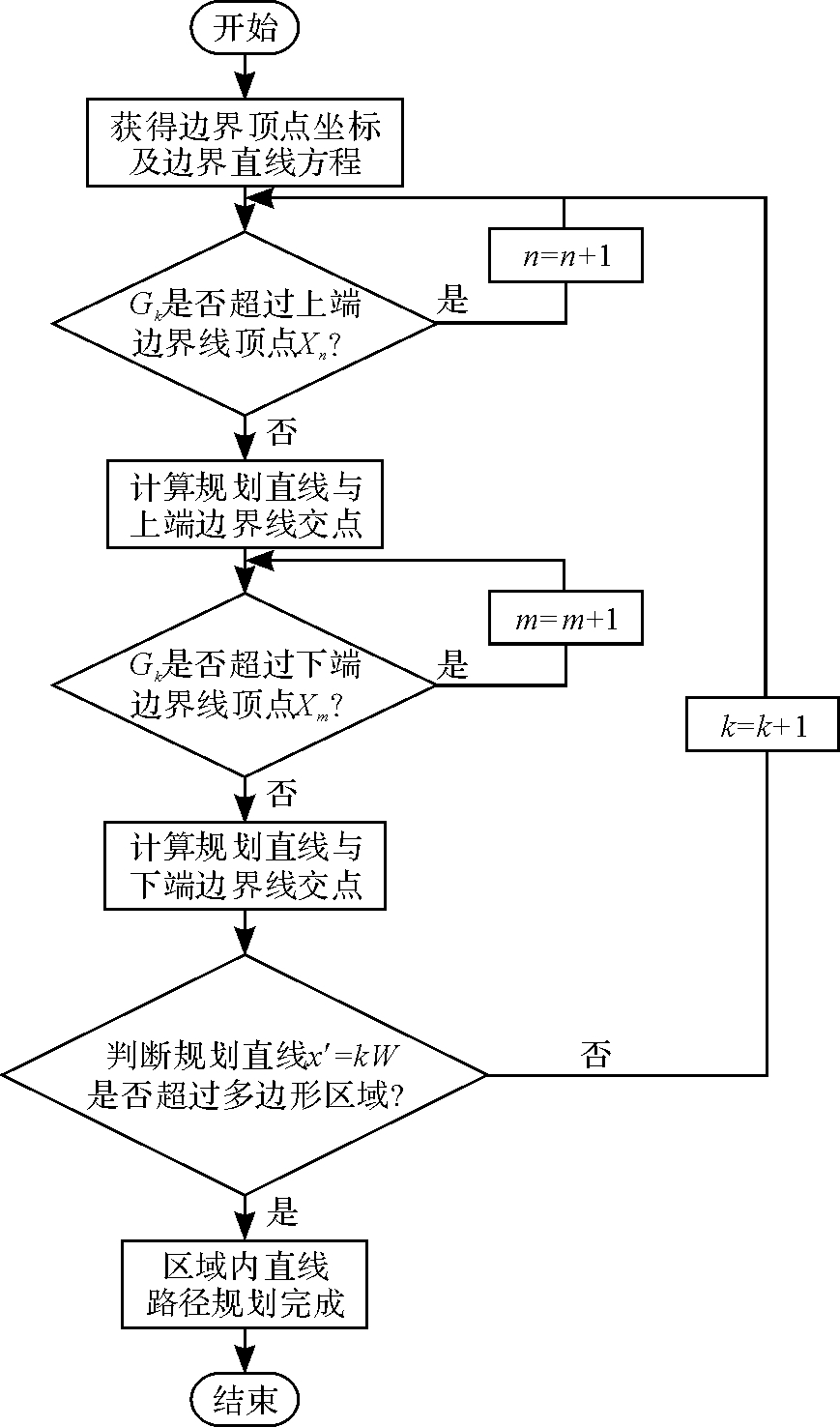
直线Gk在区域坐标系中的方程为x'=kW,W为割台宽度。联立式(2)和式(3)可求出直线Gk与边界线Lj的交点,得到各交点坐标后即可按图4所示流程对割草机器人工作区域进行路径规划。
2.2 割草机器人轨迹跟踪控制算法设计
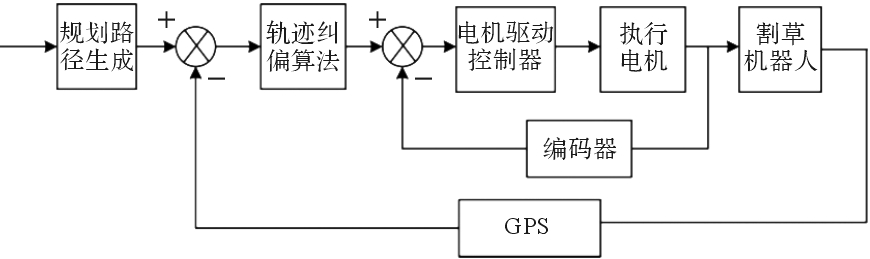
大型机场草坪割草机器人轨迹跟踪控制采用双闭环控制模式,内环采用执行电机驱动控制器,外环采用轨迹纠偏算法,其控制系统框图如图5所示。控制系统采用油电混合驱动方式,其中,执行电机选用功率为10 kW的直流电机,电机驱动控制器选用深圳泰科公司生产的AP系列精密伺服驱动器,采用双闭环(电流环+速度环)PID控制器结构,具体参数的调节过程不在此描述。
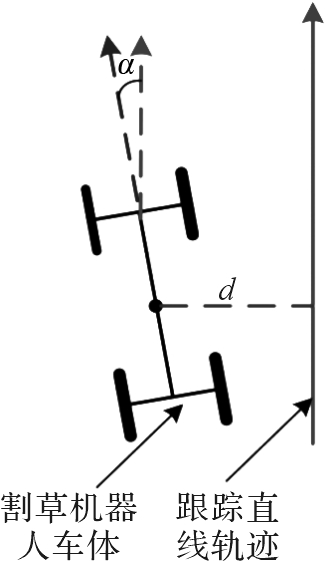
割草机器人车体与跟踪直线轨迹之间的关系如图6所示,其关系由2个参数决定,一个是车体行进方向与跟踪直线轨迹之间的偏差角α(左偏为正,右偏为负),另一个是车体中心与跟踪直线轨迹的偏差距离d(左偏为正,右偏为负),因此割草机器人与跟踪直线轨迹之间的关系可以分为以下9种情况:1)α=0°,d=0 m;2)α>0°,d=0 m;3)α<0°,d=0 m;4)α=0°,d<0 m;5)α>0°,d<0 m;6)α<0°,d<0 m;7)α=0°,d>0 m;8)α>0°,d>0 m;9)α<0°,d>0 m。设割草机器人的运行速度为v,GPS刷新频率为f,转向轮输出转向角度θ(左转为正,右转为负)最大值为θmax,最小和最大距离偏差分别为dmin和dmax。
图6 割草机器人车体与跟踪直线轨迹的位置关系
Fig. 6 Position relation between mowing robot body and tracking straight trajectory
在割草机器人的实际纠偏控制过程中,由于诸多非线性和不确定因素的存在,运用常规控制方法难以获得满意的纠偏控制效果。模糊逻辑控制和神经网络技术不需要输入和输出之间的精确数学模型,是解决上述问题的有效方法,但该方法的效果与设计者的经验参数选择有很大关系,没有统一设计标准。因此,本文根据大型机场草坪割草机器人作业特点,设计了一种简单易行的区间判断型轨迹纠偏算法。
当割草机器人按前进方向割草时,分以下5种情况讨论:
1)当车体中心与跟踪直线轨迹的偏差距离满足
如果计算得到的
2)当车体中心与跟踪直线轨迹的偏差距离满足
3)当车体中心与跟踪直线轨迹的偏差距离满足
4)当车体中心与跟踪直线轨迹的偏差距离满足
5)当车体中心与跟踪直线轨迹的偏差距离满足
当割草机器人按倒退方向割草时,采用与前进方向相同的轨迹纠偏算法,但需要调整车体行进方向与跟踪直线轨迹之间的偏差角,此时车体行进方向与跟踪直线轨迹之间的偏差角α'与前进时的偏差角α相差
3 大型机场草坪割草机器人作业能力仿真分析
3.1 传统迂回型路径运行方式下仿真分析
在一块长为70 m,宽为20 m的工作区域内模拟割草作业,设定割草机器人初始点坐标为(-1,0)m,结束点坐标为(8.4,0)m,相邻路径之间的间距为1.2 m,初始偏差角α=0°,割草机器人速度v=1.5 m/s,GPS刷新频率f=5 Hz,作业过程中割草机器人按传统迂回型路径行进。按传统迂回型路径运行时割草机器人跟踪轨迹仿真结果如图7所示。
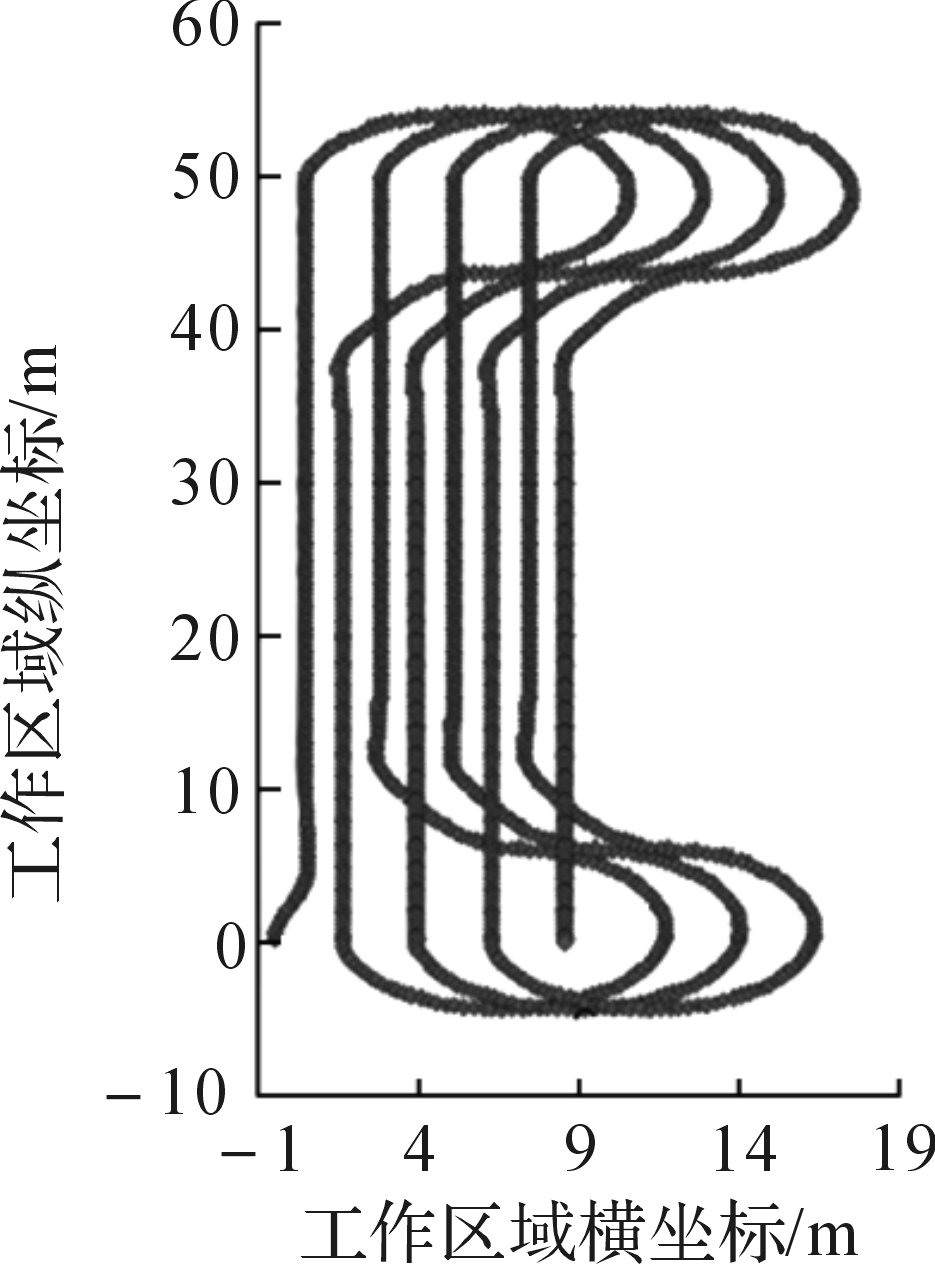
图7 传统迂回型路径运行方式下割草机器人跟踪轨迹仿真结果
Fig. 7 Simulation result of tracking trajectory of mowing robot under traditional circuitous path running mode
由图7可知,当割草机器人跟踪当前路径到达终点后会自主调头跟踪下一条路径,说明本文设计的区间判断型轨迹纠偏算法是稳定收敛的,轨迹跟踪算法与路径规划算法一致。但是收敛速度较慢,在作业区域两端出现较大的漏割区域。由图7仿真结果计算可得:割草机器人在第1次调头作业时,最大转弯半径超过了4 m,其漏割面积占割草作业面积的46.42%。
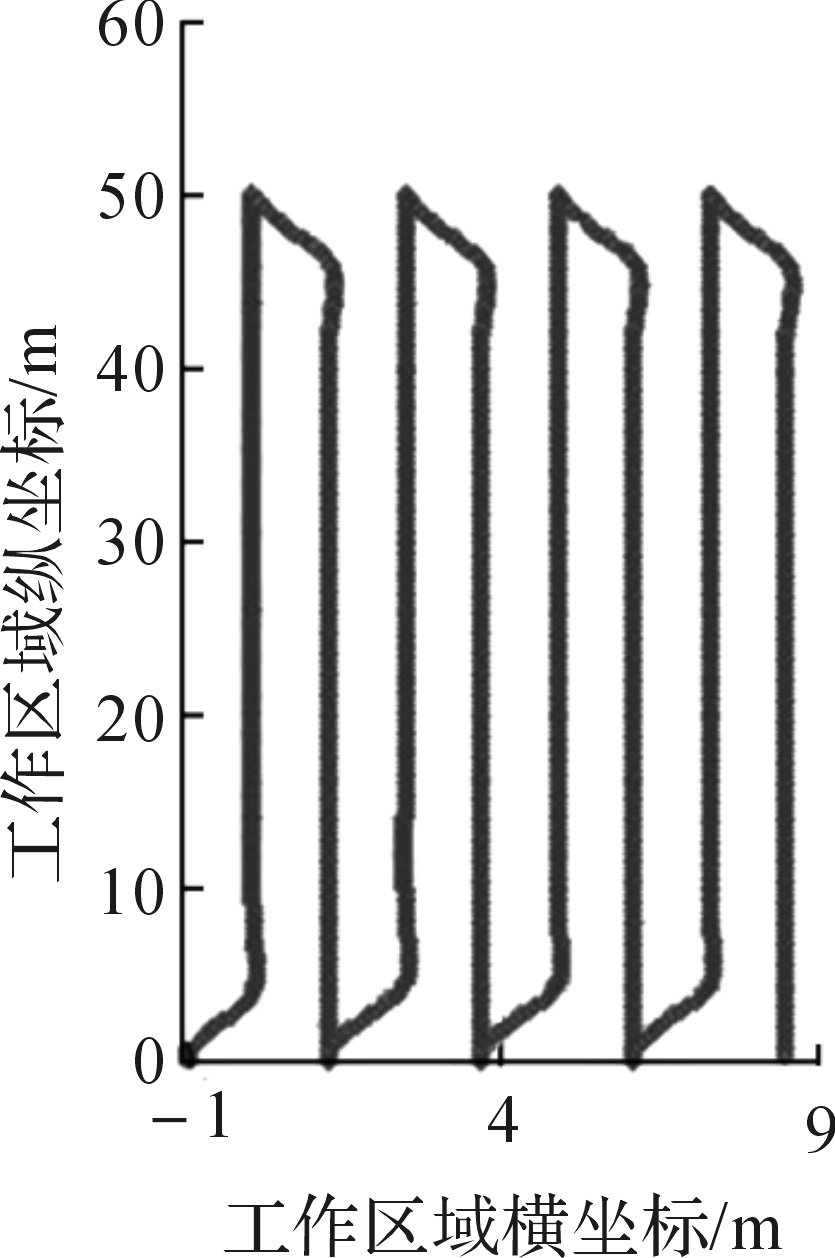
3.2 往复直线型路径下仿真分析
按2.1节设置仿真初始参数,作业过程中割草机器人按往返直线型路径行进。按往返直线型路径运行时割草机器人跟踪轨迹仿真结果如图8所示。由图8仿真结果计算可得:割草机器人漏割面积占割草作业面积的7.15%,明显优于传统迂回型路径运行方式下的仿真结果,并且在相同运行速度下收敛速度也更快。另外,按传统迂回型路径运行时是靠算法自由收敛的,在各转弯区收敛的情况都会随环境而变化,因此各次单边作业的重复性较差,而往返直线型路径运行方式下的各次单边作业重复性较好,这样可以降低对漏割区域进行补割作业的难度。
4 样机实验
目前已经完成大型机场草坪割草机器人的机械加工、装配和电气布线工作,研制完成的割草机器人样机如图9所示,该割草机器人割台的最大割幅为2.4 m。割草机器人以高精度差分GPS系统作为定位工具,GPS主基站天线固定在割草工作区域的某位置上,根据车载GPS接收信号和草场位置特点,采集某机场草坪的边界位置信息,按本文设计的路径规划算法对割草区域进行路径规划并存储规划路径(如果草坪环境没有变化,规划路径将不会改变)。在割草机器人工作过程中,先用遥控方式将割草机器人遥控至割草区域的起始处,随后将割草机器人工作模式切换为程控模式,割草机器人则依据车载GPS跟踪规划路径自主完成割草作业。
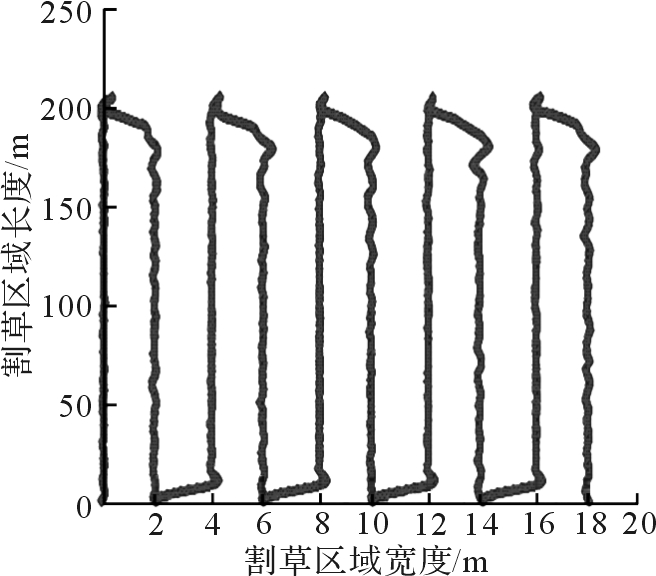
以某块草坪为例,取18 m×200 m的割草区域,对割草机器人自主作业能力进行测试。为了保证割草机器人在相邻路径中间不会出现漏割且具有较高的割草效率,设定割草机器人相邻路径之间的间距为2 m,根据GPS测取割草机器人实际运行轨迹,如图10所示。从实验结果可以看出,该结果与往返直线型路径运行方式下跟踪轨迹仿真结果一致,说明所设计的轨迹跟踪算法是正确可行的。通过图10实测数据计算可得,割草机器人漏割面积占割草作业面积的8.89%。
5 结论
1)依据车载GPS采集的位置信息完成多边形工作区域的建模,在所建立的多边形工作区域内规划往返直线型路径,该规划算法易于建立路径的显示方程,与传统迂回式路径规划相比,能克服在转向区出现较大漏割区域的缺陷。
2)以车体行进方向与跟踪直线轨迹之间的偏差角和车体中心距离跟踪直线轨迹的偏差距离为输入信息,设计了一种简单易行的区间判断型割草机器人轨迹纠偏算法。分别对按传统迂回型路径和往返直线型路径行进的割草机器人进行仿真研究,验证了轨迹纠偏算法的收敛性;将往返直线型路径规划算法和轨迹纠偏算法应用于面向大型机场的割草机器人样机中,通过实验验证了上述算法的实用性。
3)本文所设计的路径规划和轨迹跟踪控制算法简单可行,可为大型机场草坪割草机器人产品的开发提供强有力的理论支撑。
参考文献
- 1
单华佳,李梦璐,孙彦,等.近10年中国草坪业发展现状[J].草地学报,2013,21(2):222-229. doi:10.11733/j.issn.1007-0435.2013.02.003
SHAN Hua-jia, LI Meng-lu, SUN Yan, et al. Recent development of turf grass industry in China[J]. Acta Agrestia Sinica, 2013, 21(2): 222-229.
- 2
吴超峰,马雪梅.21世纪中国草坪业的现状与发展[J].天津农业科学,2009,15(3):74-77. doi:10.3969/j.issn.1006-6500.2009.03.025
WU Chao-feng, MA Xue-mei. Present situation and development of turf grass industry in the 21st century in China[J]. Tianjin Agricultural Sciences, 2009, 15(3): 74-77.
- 3
谢忠华.基于视觉导航的割草机器人运动控制[J].农业工程,2016,6(5):30-32.
XIE Zhong-hua. Motion control of mowing robot based on visual navigation[J]. Agricultural Engineering, 2016, 6(5): 30-32.
- 4
张霞,蔡宗寿.我国草坪机械使用现状及发展对策[J].农机化研究,2006,28(6):40-41. doi:10.3969/j.issn.1003-188X.2006.06.014
ZHANG Xia, CAI Zong-shou. Present situation and development countermeasures of lawn machinery in China[J]. Journal of Agricultural Mechanization Research, 2006, 28(6): 40-41.
- 5
张军巧.浅谈草坪机械系统的优化研究[J].林业机械与木工设备,2002,30(12):7-9. doi:10.3969/j.issn.2095-2953.2002.12.002
ZHANG Jun-qiao. The study on optimization fro turf machinery system[J]. Forestry Machinery & Woodworking Equipment, 2002, 30(12): 7-9.
- 6
李仁府,独孤明哲,胡麟,等.基于QPSO算法移动机器人轨迹规划与实验[J].控制与决策,2014,29(12):2151-2157. doi:10.13195/j.kzyjc.2013.1373
LI Ren-fu, DUGU Ming-zhe, HU Lin, et al. Mobile robot trajectory planning based on QPSO algorithm and experiment[J]. Control and Decision, 2014, 29(12): 2151-2157.
- 7
夏琳琳,张健沛,初妍.计算智能在移动机器人路径规划中的应用综述[J].智能系统学报,2011,6(2):160-165. doi:10.3969/j.issn.1673-4785.2011.02.011
XIA Lin-lin, ZHANG Jian-pei, CHU Yan. An application survey on computational intelligence for path planning of mobile robots[J]. CAAI Transaction on Intelligent Systems, 2011, 6(2): 160-165.
- 8
朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010,25(7):961-967.
ZHU Da-qi, YAN Ming-zhong. Survey on technology of mobile robot path planning[J]. Control and Decision, 2010, 25(7): 961-967.
- 9
许兴军.智能割草机的区域全覆盖算法设计与仿真[J].机电工程,2012,29(3):302-306. doi:10.3969/j.issn.1001-4551.2012.03.015
XU Xing-jun. Design and simulation on regional all-covered algorithm of intelligent mower[J]. Journal of Mechanical & Electrical Engineering, 2012, 29(3): 302-306.
- 10
孙炜,吕云峰,唐宏伟,等.基于一种改进A*算法的移动机器人路径规划[J].湖南大学学报(自然科学版),2017,44(4):94-101. doi:10.16339/j.cnki.hdxbzkb.2017.04.013
SUN Wei, LÜ Yun-feng, TANG Hong-wei, et al. Mobile robot path planning based on an improved A* algorithm[J]. Journal of Hunan University (Natural Sciences), 2017, 44(4): 94-101.
- 11
JIHEE H, YOONHO S. Mobile robot path planning with surrounding point set and path improvement[J]. Applied Soft Computing, 2017, 57(8): 35-47. doi:10.1016/j.asoc.2017.03.035
- 12
丛明,金立刚,房波.智能割草机器人的研究综述[J].机器人,2007,29(4):407-416. doi:10.3321/j.issn:1002-0446.2007.04.019
CONG Ming, JIN Li-gang, FANG Bo. Intelligent robot mowers: a review[J]. Robot, 2007, 29(4): 407-416.
- 13
KANAYAMA Y, KIMURA Y, MIYAZAKI F, et al. A stable tracking control method for an autonomous mobile robot[C]//Proceeding of IEEE International Conference on Robotics and Automation, Cincinnati, USA, May13-18, 1990: 384-389. doi:10.1109/ROBOT.1990.126006
- 14
NOGUCHI N, IHSII K, TERAO H. Development of an agriculture mobile robot using a geomagnetic direction sensor and image sensors[J]. Journal of Agricultural Engineering Research, 1997, 67(1): 1-15. doi:10.1109/ROBOT.1990.126006
- 15
谢德胜,徐友春,万剑,等.基于RTK-GPS的轮式移动机器人轨迹跟随控[J].机器人,2017,39(2):221-229. doi:10.13973/j.cnki.robot.2017.0221
XIE De-sheng, XU You-chun, WAN Jian, et al. Trajectory tracking control of wheeled mobile robots based on RTK-GPS [J]. Robot, 2017, 39(2): 221-229.
- 16
杨丽,曹志强,张文文,等.一种基于局部感知的多机器人动态跟随方法[J].自动化学报,2010,36(1):101-106. doi:10.3724/SP.J.1004.2010.00101
YANG Li, CAO Zhi-qiang, ZHANG Wen-wen, et al. A multi-robot dynamic following approach based on local sensing[J]. Acta Automatica Sinica, 2010, 36(1):101-106.
- 17
NARANJO J E, GONZALEZ C, GARCIA R, et al. Lane-change fuzzy control in autonomous vehicles for the overtaking maneuver[J]. IEEE Transactions on Intelligent Transportation Systems, 2008, 9(3): 438-450. doi:10.1109/TITS.2008.922880
- 18
RYOSUKE T, OSCAR B J, KAZUNOBU I, et al. Development of crawler-type robot tractor based on GPS and IMU[C]//3rd IFAC Conference in Modeling and Control in Agriculture, Horticulture and Post-Harvest Processing-Agricontrol. Amsterdam, Netherlands: Elsevier, 2010:151-156. doi:10.1109/TITS.2008.922880
- 1
摘要
为了提高割草机器人的工作效率及环境适应能力,基于移动机器人平台设计了一种既受遥控操作又能自主运行的适用于大型机场草坪作业的割草机器人。首先,运用高精度差分GPS(global positioning system,全球定位系统)采集机场草坪边界和障碍物的位置信息,根据采集的信息将机场草坪分为最少数目的凸多边形工作区域;考虑到割草机器人无法原地无半径转弯,在传统迂回式路径规划算法的基础上提出一种往返直线型路径规划算法,并在凸多边形路径规划区内推导出遍历路径的显示方程表达式。其次,运用高精度差分GPS测得割草机器人实际轨迹并与规划轨迹对比,设计了一种区间判断型轨迹纠偏算法;以执行电机的PID(proportion integration differentiation,比例积分微分)控制和区间判断型轨迹纠偏算法构造割草机器人双闭环轨迹跟踪控制器,对按传统迂回式路径和往返直线型路径行进的割草机器人进行轨迹跟踪仿真分析。最后,以自制的割草机器人为例,按往返直线型路径运行方式进行样机实验。仿真结果发现:当割草机器人跟踪当前路径到达终点后会自动调头跟踪下一条路径,验证了轨迹跟踪算法的稳定性;传统迂回式路径运行方式下割草机器人的漏割率较高,达到46.42%,而往返直线型路径运行方式下其漏割率为7.15%,明显优于传统迂回式路径仿真结果。样机实验测得的漏割率为8.89%,与仿真实验结果一致,表明所设计的轨迹跟踪算法对大型机场草坪作业割草机器人是适用的。研究结果可为大型机场草坪割草机器人的开发提供理论指导。
Abstract
In order to improve the work efficiency and environmental adaptability of mowing robot, a mowing robot for large airport lawn was designed, which could operate remotely and operate autonomously based on the mobile robot platform. Firstly, high precision differential GPS(global positioning system)was used to collect the location information of airport lawn boundary and obstacle. The airport lawn was divided into a minimum number of convex polygonal working areas according to the collected information. Considering that the mowing robot couldn’t turn around without radius in situ, a round-trip straight path planning algorithm based on traditional circuitous path planning algorithm was proposed, and the analytic equations of path in the convex polygon working area were derived. Secondly, the actual trajectory of the mowing robot was measured by high-precision differential GPS and compared with the planned trajectory, and a interval judgment trajectory correction algorithm was designed. The double closed-loop trajectory tracking controller was constructed by PID control of executive motor and interval judgment trajectory correction algorithm. Trajectory tracking simulation experiment of a mowing robot running along the traditional roundabout path and the straight-line roundabout path was carried out. Finally, taking the self-made lawn mower as an example, the prototype experiment was carried out according to the round-trip straight path running mode. It was found that the mowing robot would automatically turn its head to track the next path when the mowing robot tracked the current path to the bound, which verified the stability of the trajectory tracking algorithm. The missing cutting rate of mowing robot was 46.42% under traditional circuitous path running mode, while the missing cutting rate was 7.15% under round-trip straight path running mode, which was obviously better than the simulation result of traditional circuitous path. The missing cutting rate measured in the prototype experiment was 8.89%, which was consistent with the simulation results. It showed that the proposed trajectory tracking algorithm was effective for the mowing robot. The research results can provide theoretical guidance for the development of lawn mowing robot for large airport lawn.
草坪不仅能美化生活环境,还能减少太阳辐射、调节气候、净化大气和保持水土等。据不完全统计,我国约有70万h
路径规划和轨迹跟踪控制是割草机器人实现高效率工作的关键因素。对于移动机器人而言,传统的路径规划是寻求一条从起始点到终点的无碰撞最优路
在完成路径规划后,需设计相应的轨迹跟踪控制算法,使割草机器人按照规划路径运行。轨迹跟踪控制算法主要有2
综上所述,本文针对传统路径规划算法的不足和大型机场草坪割草机器人的特点,设计一种新的往返直线型路径规划算法。结合执行电机的PID(proportion integration differentiation,比例积分微分)控制和区间判断型轨迹纠偏算法,设计大型机场草坪割草机器人的轨迹跟踪控制算法,并通过仿真和样机实验验证算法的有效性。