基于锚索状态图像识别的退锚机器人作业可行性判别
Operation feasibility discrimination of anchor withdrawing robot based on anchor cable state image recognition
基于锚索状态图像识别的退锚机器人作业可行性判别 |
| 刘治翔,庄源,谢春雪 |
|
Operation feasibility discrimination of anchor withdrawing robot based on anchor cable state image recognition |
| Zhixiang LIU,Yuan ZHUANG,Chunxue XIE |
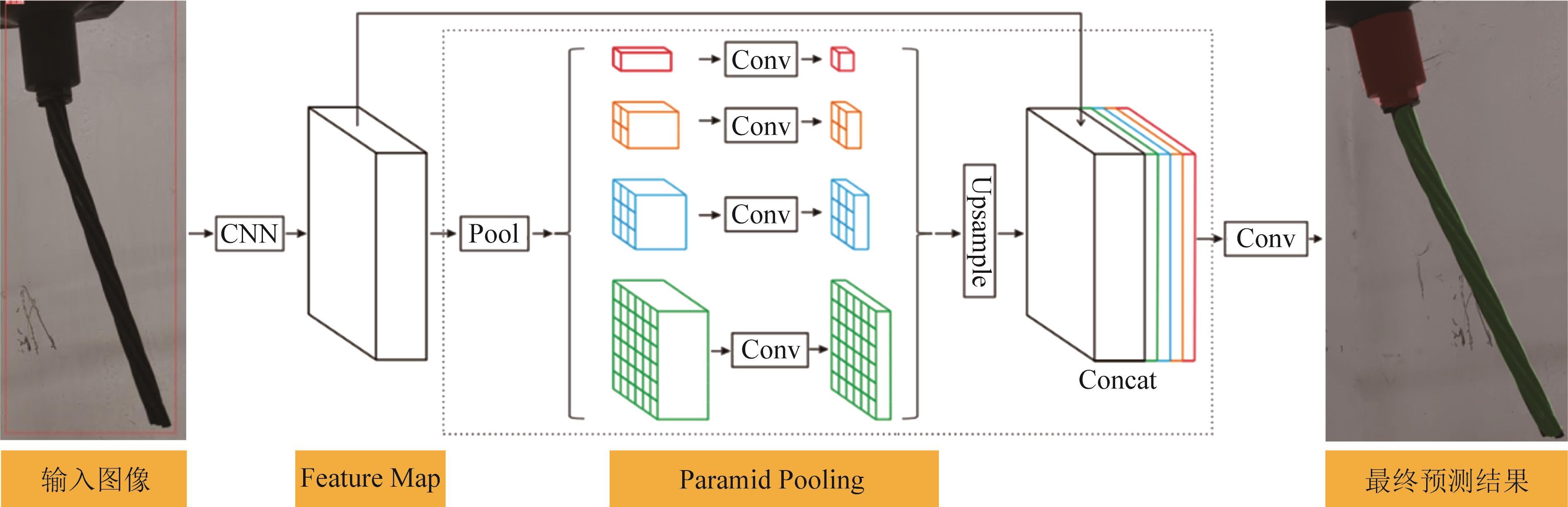
| 图12 PSPNet模型结构 |
| Fig.12 PSPNet model structure |
|
|