RV(rotate vector,旋转矢量)减速器是一种新型的摆线针轮行星传动机构,具有传动精度高、体积小、刚度大、质量小、结构紧凑和传动比大等优点[1 ] ,目前已被广泛应用于机器人、航空航天装备、数控机床和医疗设备等多个领域[2 ] 。RV减速器多部件的随机扰动会影响其整体运行稳定性和使用寿命[3 ] 。因此,开展RV减速器可靠性评估,对保障机械设备安全运行、降低维护成本和提高经济效益具有重要意义[4 -5 ] 。
现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究。在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究。在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法。在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] 。
尽管RV减速器的可靠性研究已取得显著进展,但当前的可靠性分析与评估大多基于概率理论,即假设不确定因素服从特定的概率分布,这需要大量样本数据来构建准确的分布函数。然而,RV减速器内部结构复杂且失效机理多样,受限于紧凑的内部结构和有限的测量手段,部分不确定参量的样本信息很难大量获取,无法构建准确的概率分布函数。若仍采用理想的概率假定,则会导致可靠性评估不准确甚至错误。此外,RV减速器可靠性的影响因素众多,而考虑多维不确定因素的可靠性分析方法极其复杂,涉及多变量函数的迭代求解,计算成本高且效率低,计算时间远超预期[17 -18 ] 。
为此,本文针对RV减速器多失效模式下的可靠性分析问题,基于概率-区间混合不确定性理论提出了一种新的可靠性评估方法。首先,根据应力-强度干涉理论,构建RV减速器多部件的失效准则。随后,分别采用概率变量和区间变量来描述大样本量和小样本量下的不确定参量,并提出概率-区间混合可靠性问题的双层嵌套循环求解框架。针对概率问题,采用修正混沌控制方法(modified chaos control method, MCCM)实现快速求解;针对区间问题,利用乘法降维法(multiplicative dimensionality reduction method, MDRM)实现精准量化。最后,通过与参考解对比来验证所提出的可靠性评估方法的高效性与鲁棒性,并进一步分析RV减速器在不同失效模式下的混合可靠性特征。
1 RV 减速器的失效模式
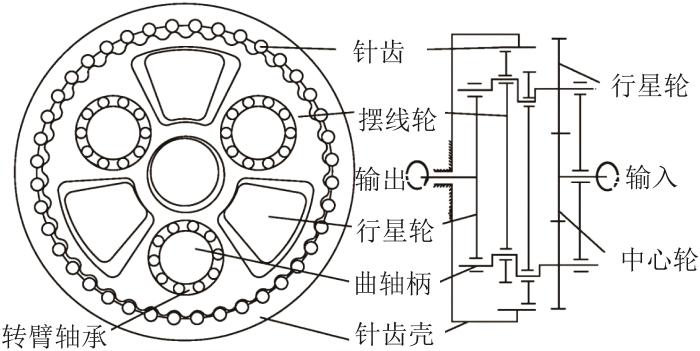
RV减速器由一级行星齿轮传动机构和一级摆线针轮传动机构组成,其结构如图1 所示。RV减速器的主要失效形式包括行星轮齿面接触疲劳失效、行星轮齿根弯曲疲劳失效和摆线轮齿面接触疲劳失效。
图1
图1
RV 减速器结构示意图
Fig.1
Schematic diagram of RV reducer structure
1.1 行星轮齿面接触疲劳失效
T a = 60 P 2 π n (1)
T 1 = T a N p k p (2)
式中:N p 为行星轮数量,k p 为行星轮间载荷分配不平衡系数。
F t = 2 T 1 d (3)
σ H = Z H Z E Z ε Z β F t d b ⋅ u + 1 u ⋅ K A K V K H β K H α (4)
式中:Z H Z E Z ε Z β K A 为使用系数,K V 为动载系数,K H β K H α b u
σ H l i m j = σ H l i m Z N Z R Z V Z W Z L Z X (5)
式中:σ H lim 为试验齿轮的齿面接触疲劳极限,Z N 为寿命系数,Z R 为齿面粗糙度系数,Z V 为速度系数,Z W 为工作硬化系数,Z L 为润滑剂系数,Z X 为计算接触强度的尺寸系数。
当齿面接触应力超过接触疲劳强度时,行星轮失效。基于应力-强度干涉模型[17 ] ,行星轮齿面接触疲劳失效的极限状态函数g 1 可表示为:
g 1 = σ H l i m j - s f 1 σ H (6)
1.2 行星轮齿根弯曲疲劳失效
行星轮齿根弯曲疲劳失效是导致RV减速器失效的主要模式之一。行星轮齿根弯曲应力σ F 的计算式如下:
σ F = F t b m n Y F a Y S a Y ε Y β K A K V K F β K F α (7)
式中:m n Y F a Y S a Y ε Y β K F β K F α
σ F l i m j = σ F l i m Y S T Y N T Y δ r e l T Y R r e l T Y X (8)
式中:σ F l i m Y S T Y N T Y δ r e l T Y R r e l T Y X
综上,行星轮齿根弯曲疲劳失效的极限状态函数g 2 可表示为:
g 2 = σ F l i m j - s f 2 σ F (9)
1.3 摆线轮齿面接触疲劳失效
由于RV减速器中摆线轮的复杂性和特殊性,当摆线轮与针轮啮合时,其齿面容易发生接触疲劳。因此,摆线轮与针轮之间的接触疲劳失效也是常见的失效模式之一。摆线轮齿面接触应力σ 1H 的计算式如下:
σ 1 H = σ 1 H 0 K K 1 A K 1 V K 1 H (10)
式中:K 为计算系数,K 1A 为使用系数,K 1V 为动载系数,K 1H 为齿间载荷分布系数,σ 1H0 为接触应力初始值。
σ 1 H l i m s = σ 1 H l i m Z 1 N Z 1 L Z 1 V Z 1 R Z 1 W Z 1 X (11)
式中:σ 1H lim 为试验齿轮的齿面接触疲劳极限,Z 1N 为寿命系数,Z 1L 为润滑剂系数,Z 1V 为速度系数,Z 1R 为粗糙度系数,Z 1W 为工作硬化系数,Z 1X 为计算接触强度的尺寸系数。
则摆线轮齿面接触疲劳失效的极限状态函数g 3 可表示为:
g 3 = σ 1 H l i m s - s f 3 σ 1 H (12)
2 概率-区间混合可靠性求解方法
受限于对RV减速器复杂失效机理认知的不足,加上运行环境波动、制造装配偏差等系统随机性因素的耦合影响,仅依靠传统概率变量难以准确描述各因素对系统可靠性的影响,故需采用差异化的不确定性参数表征方式。为此,本文结合区间变量和概率变量,描述RV减速器中相关不确定性因素的分布形式,并对考虑概率-区间混合不确定性的RV减速器可靠性评估问题展开研究。
对于概率-区间混合不确定性系统,假设系统中存在N 个相互独立的概率变量和M 个相互独立的区间变量,分别记为X = [ X 1 X 2 ⋯ X N ] Y = [ Y 1 Y 2 ⋯ Y M ] g X , Y
g X , Y = z m a x - z X , Y
式中:z X , Y z max 为系统响应的容许值。
当系统响应值大于容许值时,g X , Y < 0 P f 可表示为:
P f = P g X , Y < 0
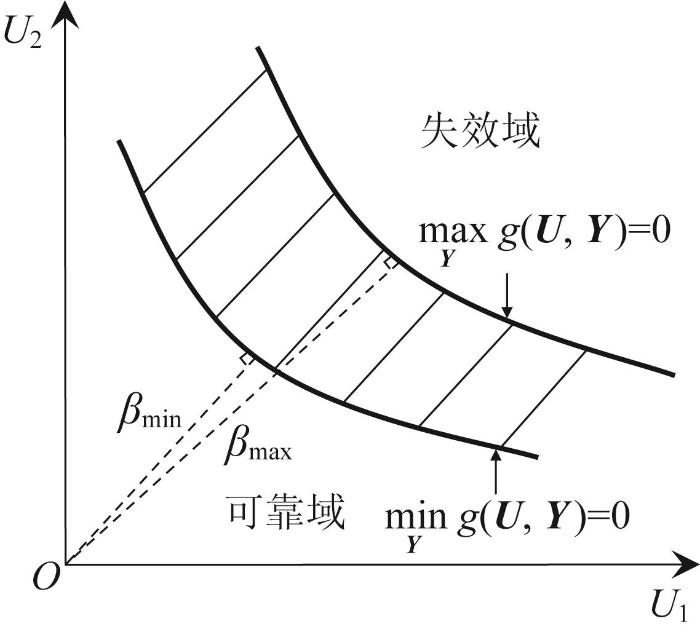
在概率-区间混合不确定性系统中,因存在区间变量,故系统响应的极限状态函数可表示为一个下边界m i n Y g ( U , Y ) = 0 m a x Y g ( U , Y ) = 0 U X 图2 所示。
图2
图2
极限状态函数的二维平面示意图
Fig.2
Schematic diagram of limit state function in the two-dimensional plane
由图2 可知,此时结构的可靠度指标β 从确定值转化为区间值,β ∈ [ β m i n , β m a x ] β min 、β max 分别为可靠度的最小值和最大值。在本文研究中,重点关注结构的最大失效概率P f m a x β m i n
β m i n = m i n U U s . t . m i n Y g ( U , Y ) = 0
针对概率-区间混合不确定性系统,采用双层嵌套循环求解策略,将概率-区间混合可靠性转化为概率可靠性和区间不确定性的循环迭代求解,以实现混合不确定性系统可靠性的精准快速预测。
2.1 概率可靠性求解
式(15)的求解涉及概率可靠性和区间不确定性的循环求解。在概率可靠性求解中,当极限状态函数的非线性程度较低时,可采用HL-RF(Hasofer-Lind-Rackwitz-Fiessler)算法;而当极限状态函数的非线性程度较高时,随机变量会在迭代过程中出现振荡,导致计算结果不收敛。针对以上问题,常采用CCM,其迭代求解格式可表示为[19 ] :
U k + 1 = U k + λ C h U k , Y k - U k h U k , Y k = - β k + 1 ∇ g ( U k , Y k ) ∇ g U k , Y k β k + 1 = g U k , Y k - ∇ g U k , Y k T U k ∇ g U k , Y k (16)
式中:λ 为控制参数,λ ∈ 0 , 1 λ = 1 式(16)退化为HL-RF算法; C N 维对合矩阵;k 为迭代步数。
然而,在CCM中,迭代步长受到严格的控制,导致其计算效率较低。为解决上述问题,将CCM计算得到的向量n U k + 1 [20 ] 。修正后的CCM(MCCM)可表示为:
U k + 1 = β k + 1 n U k + 1 n U k + 1 n U k + 1 = U k + λ C h U k , Y k - U k h U k , Y k = - β k + 1 ∇ g U k , Y k ∇ g U k , Y k β k + 1 = g U k , Y k - ∇ g U k , Y k T U k | | ∇ g U k , Y k | | (17)
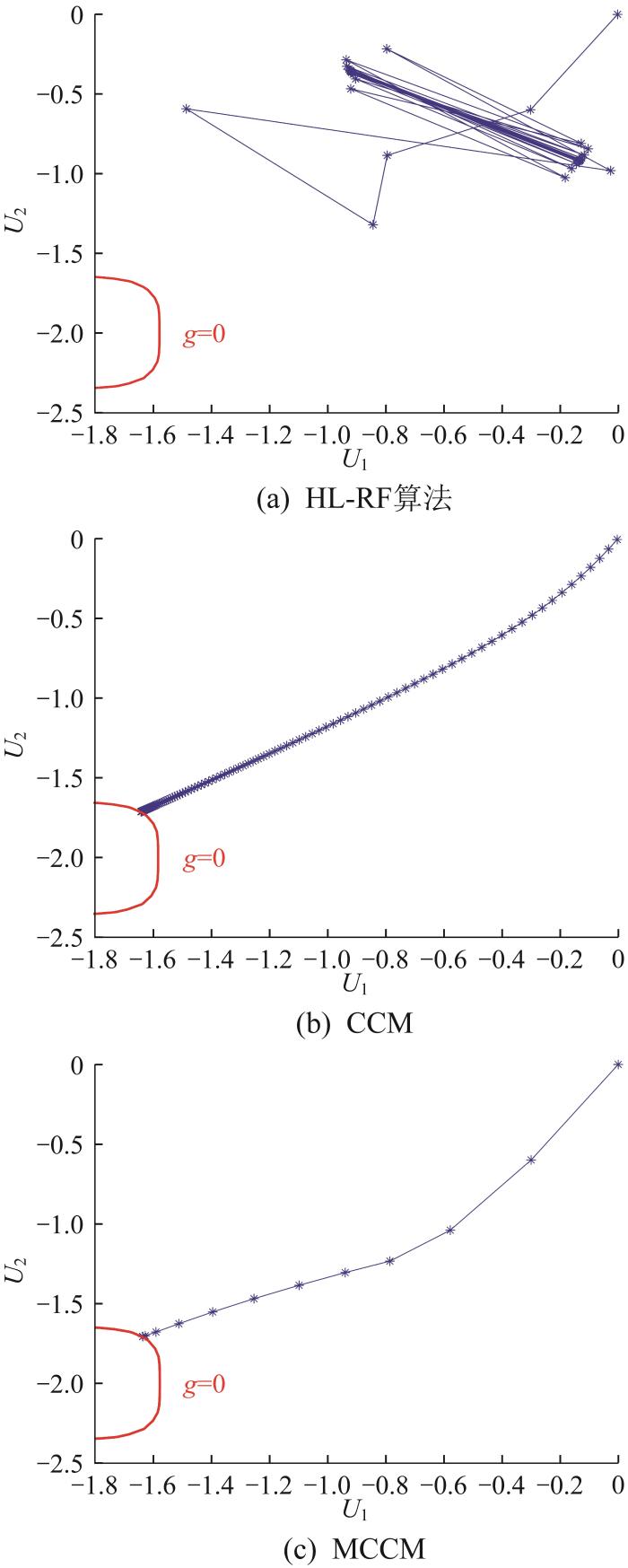
图3 所示为不同概率可靠性求解方法的迭代过程。在该算例中,极限状态函数g X = X 1 4 + 2 X 2 4 - 20 X 1 和X 2 均服从正态分布N (10, 5)。图中:U 1 U 2 X 1 X 2 图3 结果表明:HL-RF算法无法获取结构失效概率,而CCM可有效避免概率可靠性求解过程中的不收敛问题;采用MCCM求解时,仅需少量迭代即可获取结构的失效概率,可在解决收敛问题的同时大幅提高概率可靠性的求解效率。
图3
图3
不同概率可靠性求解方法的迭代过程
Fig.3
Iterative process of different probability-based reliability solving methods
2.2 区间不确定性求解
在区间不确定性求解中,涉及多个区间变量的两两组合,需要大量的重复计算。为解决上述问题,根据MDRM[21 ] ,将第k +1个迭代步的极限状态函数g U k + 1 , Y
g ( U k + 1 , Y ) ≈ g ( U k + 1 , Y c ) 1 - M ∏ j = 1 M g j ( U k + 1 , Y - j c ) (18)
式中: Y c 为区间中值向量,Y c = [ Y 1 c Y 2 c ⋯ Y M c ] Y - j c Y j Y - j c = [ Y 1 c Y 2 c ⋯ Y j - 1 c Y j + 1 c ⋯ Y M c ]
g j U k + 1 , Y - j c = g U k + 1 , Y c + ∂ g j U k + 1 , Y c ∂ Y j δ j Y j r + ∂ 2 g j U k + 1 , Y c ∂ Y j 2 δ j Y j r 2 2 (19)
式中:Y j r δj 为系数,δ j ∈ [ - 1 , 1 ]
g j U k + 1 , Y - j c = a j δ j 2 + b j δ j + c j (20)
a j = ∂ 2 g j U k + 1 , Y c ∂ Y j 2 Y j r 2 2 b j = ∂ g j U k + 1 , Y c ∂ Y j Y j r c j = g U k + 1 , Y c
此时,式(18)中的区间不确定性求解问题转化为函数极值求解问题,进而可减少区间不确定性求解的迭代次数,提高了求解效率。更新后的区间变量可表示为:
Y k + 1 = Y c + δ k + 1 Y r (21)
Y r = [ Y 1 r Y 2 r ⋯ Y M r ]
δ k + 1 = [ δ 1 k + 1 δ 2 k + 1 ⋯ δ M k + 1 ]
通过对概率可靠性和区间极值问题的循环求解,即可实现对式(15)中优化问题的求解。当计算结果满足式(22)所示的收敛条件时,停止求解。
U k + 1 - U k U k ≤ ϵ 1 g U k + 1 , Y k + 1 ≤ ϵ 2 (22)
式中:ϵ 1 ϵ 2 U k + 1
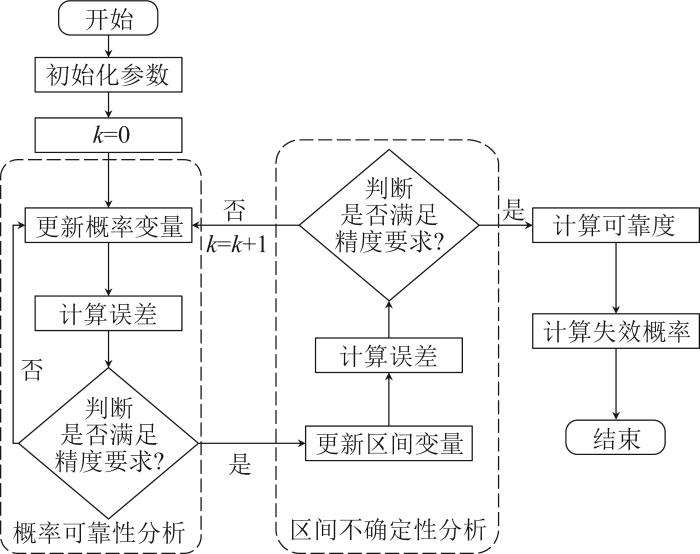
基于上述双层嵌套循环求解策略,构建基于MCCM-MDRM的混合可靠性求解方法,其计算流程如图4 所示。
图4
图4
概率-区间混合可靠性求解流程
Fig.4
Solution process of probability-interval hybrid reliability
3 算例分析
为了验证本文所提出的混合可靠性求解方法(MCCM-MDRM)的高效性与鲁棒性,基于具体算例对RV减速器在不同失效模式下的混合可靠性进行评估。在本研究中,不考虑多种失效模式之间的相关性。采用蒙特卡洛模拟(Monte Carlo simulation, MCS)及自适应Kriging蒙特卡洛模拟(adaptive Kriging MCS, AK-MCS)的计算结果作为参考解。不同失效模式下相关参数的取值与分布情况如表1 至表3 所示。
表4 所示为当安全系数s f1 =1.3时,不同样本量下基于MCS方法的行星轮齿面接触疲劳最大失效概率的计算结果。表4 结果表明:随着样本量的增加,MCS方法的计算结果逐渐收敛。为保证计算精度和计算效率,在后续所有计算中,采用样本量为1 000 000时的MCS计算结果作为参考解。
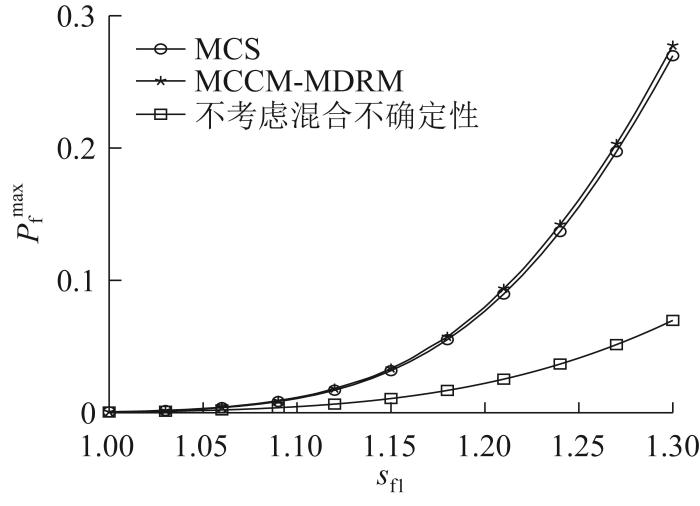
图5 所示为不同安全系数s f1 下行星轮齿面接触疲劳最大失效概率的变化曲线。图中“不考虑混合不确定性”表示仅将区间变量变为概率变量(不改变参数取值,只改变其分布形式)的情况。从图5 中可以看出,当不考虑概率-区间混合不确定性时,行星轮齿面接触疲劳最大失效概率的预测结果偏小,导致可靠性评估结果存在偏差;当考虑混合不确定性时,本文所提出的方法(MCCM-MDRM)与MCS方法的计算结果吻合良好,验证了本文方法的准确性。
图5
图5
行星轮齿面接触疲劳最大失效概率随安全系数的变化曲线
Fig.5
Variation curves of maximum failure probability of planetary gear tooth surface contact fatigue with safety factor
表5 所示为安全系数s f1 =1.3时,不同控制参数λ 下行星轮齿面接触疲劳最大失效概率的计算结果。表5 结果表明:在不同控制参数下,本文所提出的方法(MCCM-MDRM)能获得一致的计算结果,验证了本文方法的鲁棒性。表6 所示为不同控制参数λ 下行星轮齿面接触疲劳最大失效概率的迭代求解次数。表6 结果表明:本文所提出的方法在控制参数较小时的计算效率与AK-MCS方法接近。随着控制参数的增大,本文所提出的方法所需的迭代求解次数逐渐减少,验证了本文方法的高效性。在后续计算中,取控制参数λ =0.5。
综上,本文方法的计算误差主要来源于两方面:第一,MCCM以一阶可靠度求解方法为基础,在处理高非线性问题时存在固有局限性,易导致计算结果产生误差;第二,MDRM在区间中值处进行二阶泰勒展开,这种基于局部线性化的近似处理,在面对高非线性问题时难以精准适配复杂的非线性关系,进而可能导致结果产生误差。
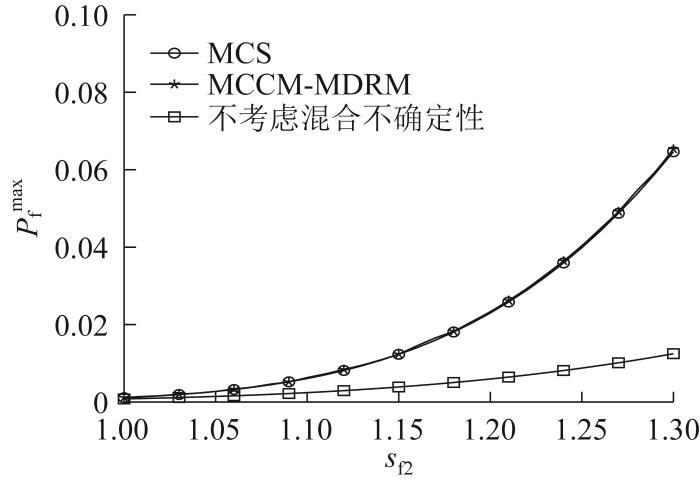
图6 所示为不同安全系数s f2 下行星轮齿根弯曲疲劳最大失效概率的变化曲线。在该分析中,概率变量存在多种分布形式,如正态分布和对数正态分布。从图6 中可以看出,本文所提出的方法(MCCM-MDRM)在处理多类型分布的概率变量时,仍能保持较高的计算精度。此外,当不考虑混合不确定性时,MCCM-MDRM预测的最大失效概率偏小,进一步说明了考虑概率-区间混合不确定性的必要性。
图6
图6
行星轮齿根弯曲疲劳最大失效概率随安全系数的变化曲线
Fig.6
Variation curves of maximum failure probability of planetary gear tooth root bending fatigue with safety factor
表7 所示为不同安全系数s f2 下行星轮齿根弯曲疲劳最大失效概率的计算结果。表7 结果表明:本文所提出的方法(MCCM-MDRM)的计算结果与MCS方法的计算结果吻合良好,进一步验证了本文方法的准确性。表8 所示为不同安全系数s f2 下MCCM-MDRM和AK-MCS方法的迭代求解次数对比。表8 结果表明:AK-MCS方法所需的迭代求解次数受失效概率影响,而本文所提出的方法仅需少量迭代即可获得混合可靠性的评估结果,且计算结果不受失效概率的影响,验证了本文方法的鲁棒性。
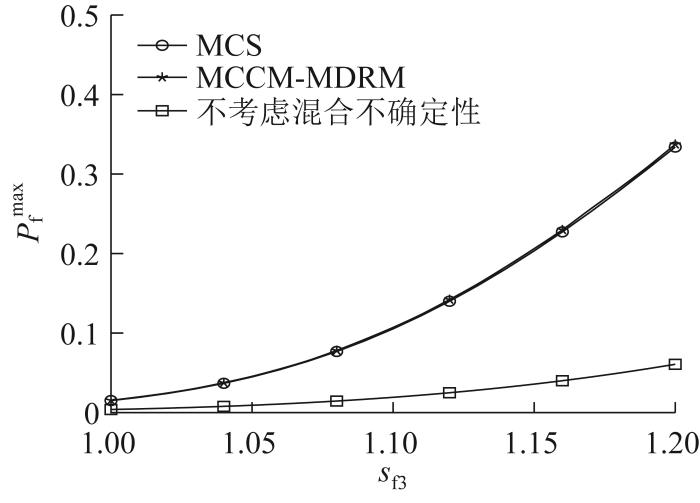
图7 与表9 所示为不同安全系数s f3 下摆线轮齿面接触疲劳最大失效概率的计算结果。从图7 中可以看出,当不考虑混合不确定性时,摆线轮齿面接触疲劳最大失效概率的预测结果存在较大偏差;当考虑混合不确定性时,本文所提出的方法(MCCM-MDRM)与MCS方法的预测结果吻合良好,说明本文方法可准确预测摆线轮齿面接触疲劳失效行为。表10 所示为不同初值条件( U 0 、 Y 0 的取值不同)下摆线轮齿面接触疲劳最大失效概率的计算结果。表10 结果表明:本文所提出的方法在不同初值条件下均能保持计算结果的稳定性,进一步验证了本文方法的鲁棒性。
图7
图7
摆线轮齿面接触疲劳最大失效概率随安全系数的变化曲线
Fig.7
Variation curves of maximum failure probability of cycloidal gear tooth surface contact fatigue with safety factor
4 结 论
本文考虑RV减速器可靠性评估中同时存在的概率、区间不确定性变量,基于应力-强度干涉理论构建了RV减速器多部件的失效准则,并提出了适用于RV减速器的概率-区间混合可靠性评估方法,主要结论如下。
1)创新性地将概率-区间混合不确定性理论引入RV减速器可靠性评估中,提出了考虑概率-区间混合不确定性的RV减速器可靠性双层嵌套循环求解策略。同时,结合MCCM和MDRM完成了对混合可靠性的快速求解。本文所提出方法的计算结果与参考解吻合良好,说明其可实现RV减速器在不同失效模式下的混合可靠性评估。
2)混合不确定性对RV减速器可靠性有显著影响,不考虑混合不确定性会导致RV减速器失效概率预测结果较实际情况偏小,这可能会导致RV减速器失效的错误预判。
3)所提出的可靠性评估方法在不同参数条件下的计算结果均能保持良好的稳定性,且仅需少量迭代即可获得RV减速器在不同失效模式下的混合可靠性,验证了该方法的高效性和鲁棒性。
4)RV减速器在不同失效模式下的最大失效概率与结构安全系数呈非线性关系,合理考虑安全系数对保障RV减速器的安全运行具有重要作用。
本文仅针对RV减速器的混合不确定性展开了研究。但在实际工况中,RV减速器的疲劳强度随时间变化,且多失效模式及随机参数之间存在相关性,未来可采用时变可靠性分析方法和相关性分析方法对RV减速器的可靠性评估问题展开进一步研究,以获取更为准确的失效概率。
本文链接: https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.192
参考文献
View Option
[1]
何卫东 , 单丽君 RV减速器研究现状与展望
[J]. 大连交通大学学报 , 2016 , 37 (5 ): 13 -18 .
[本文引用: 1]
HE W D SHAN L J Status and development of RV reducer
[J]. Journal of Dalian Jiaotong University , 2016 , 37 (5 ): 13 -18 .
[本文引用: 1]
[2]
刘昶 RV减速器传动精度预估与退化规律研究
[D]. 重庆 : 重庆大学 , 2022 .
[本文引用: 1]
LIU C Research on prediction and degradation law of transmission accuracy of RV reducer
[D]. Chongqing : Chongqing University , 2022 .
[本文引用: 1]
[3]
PARK J KIM Y NA K et al Variance of energy residual (VER): an efficient method for planetary gear fault detection under variable-speed conditions
[J]. Journal of Sound and Vibration , 2019 , 453 : 253 -267 .
[本文引用: 1]
[4]
CHEN L R HU H Y ZHANG Z R et al Application of nonlinear output frequency response functions and deep learning to RV reducer fault diagnosis
[J]. IEEE Transactions on Instrumentation and Measurement , 2021 , 70 : 3503214 .
[本文引用: 1]
[5]
徐航 , 聂义轩 , 温东杰 , 等 RV减速器精度寿命的退化与可靠性评估
[J]. 机械传动 , 2026 , 50 (1 ): 133 -141 .
[本文引用: 1]
XU H NIE Y X WEN D J et al Degradation and reliability assessment of accuracy life of RV reducers
[J]. Journal of Mechanical Transmission , 2026 , 50 (1 ): 133 -141 .
[本文引用: 1]
[6]
乔雪涛 , 盛坤 , 李优华 , 等 基于Workbench和nCode的摆线轮疲劳寿命及可靠性分析
[J]. 机械强度 , 2024 , 46 (6 ): 1458 -1464 .
[本文引用: 1]
QIAO X T SHENG K LI Y H et al Fatigue life and reliability analysis of cycloidal gears based on Workbench and nCode
[J]. Journal of Mechanical Strength , 2024 , 46 (6 ): 1458 -1464 .
[本文引用: 1]
[7]
周坤 , 叶楠 , 吴锦辉 , 等 RV减速器高应力加速退化试验及可靠性分析
[J]. 哈尔滨工业大学学报 , 2022 , 54 (7 ): 37 -44 . doi:10.11918/202112011
[本文引用: 1]
ZHOU K YE N WU J H et al High stress accelerated degradation test and reliability analysis of RV reducer
[J]. Journal of Harbin Institute of Technology , 2022 , 54 (7 ): 37 -44 .
DOI:10.11918/202112011
[本文引用: 1]
[8]
杜雪松 , 楼嘉彬 , 黄玉成 , 等 考虑强度退化与失效相关性的RV减速器动态可靠性分析
[J]. 机械传动 , 2020 , 44 (2 ): 98 -103 , 120 .
[本文引用: 1]
DU X S LOU J B HUANG Y C et al Dynamic reliability analysis of RV reducer considering strength degradation and dependent failure
[J]. Journal of Mechanical Transmission , 2020 , 44 (2 ): 98 -103 , 120 .
[本文引用: 1]
[9]
李金峰 , 杨翊坤 , 王西峰 , 等 基于多元退化数据的RV减速器可靠性评估
[J]. 机械传动 , 2023 , 47 (5 ): 82 -87 .
[本文引用: 1]
LI J F YANG Y K WANG X F et al Reliability evaluation of RV reducers based on multi degenerate data
[J]. Journal of Mechanical Transmission , 2023 , 47 (5 ): 82 -87 .
[本文引用: 1]
[10]
郑胜予 , 赵刚 , 肖正明 , 等 考虑失效相关性的行星摆线减速器结构多目标优化设计
[J]. 机械传动 , 2022 , 46 (6 ): 64 -72 .
[本文引用: 1]
ZHENG S Y ZHAO G XIAO Z M et al Multi-objective optimization design of planetary cycloidal reducer structure with considering failure correlation
[J]. Journal of Mechanical Transmission , 2022 , 46 (6 ): 64 -72 .
[本文引用: 1]
[11]
李杰 , 丁锋 基于模糊贝叶斯网络的RV减速器可靠性分析
[J]. 内燃机与配件 , 2023 (2 ): 54 -56 .
[本文引用: 1]
LI J DING F Reliability analysis of RV reducer based on fuzzy Bayesian network
[J]. Internal Combustion Engine & Parts , 2023 (2 ): 54 -56 .
[本文引用: 1]
[14]
YANG M D ZHANG D Q CHENG C et al Reliability-based design optimization for RV reducer with experimental constraint
[J]. Structural and Multidisciplinary Optimization , 2021 , 63 (4 ): 2047 -2064 .
[15]
QIAN H M LI Y F HUANG H Z Time-variant reliability analysis for industrial robot RV reducer under multiple failure modes using Kriging model
[J]. Reliability Engineering & System Safety , 2020 , 199 : 106936 .
[16]
[本文引用: 1]
LIU J XIAO Z M ZHANG L L et al Transmission accuracy reliability analysis and parameter optimization of RV reducer considering cycloid gear wear
[J]. Chinese Journal of Engineering Design , 2022 , 29 (6 ): 739 -747 .
DOI:10.3785/j.issn.1006-754X.2022.00.081
[本文引用: 1]
[17]
李军星 , 高锐 , 邱明 , 等 考虑动态时变载荷的滚动轴承可靠性寿命评估方法
[J]. 工程设计学报 , 2024 , 31 (4 ): 420 -427 .
[本文引用: 2]
LI J X GAO R QIU M et al Reliability life evaluation method of rolling bearing considering dynamic time-varying loads
[J]. Chinese Journal of Engineering Design , 2024 , 31 (4 ): 420 -427 .
[本文引用: 2]
[18]
刘鑫 , 李飞虎 基于概率-区间混合模型的六足机器人运动稳定性优化设计方法
[J]. 工程设计学报 , 2024 , 31 (5 ): 585 -591 .
[本文引用: 1]
LIU X LI F H Optimization design method for kinematic stability of hexapod robot based on probability-interval hybrid model
[J]. Chinese Journal of Engineering Design , 2024 , 31 (5 ): 585 -591 .
[本文引用: 1]
[19]
郭正阳 动车组传动齿轮多失效模式的可靠性分析
[D]. 大连 : 大连交通大学 , 2020 .
[本文引用: 1]
GUO Z Y Reliability analysis of multiple failure modes for EMU transmission gears
[D]. Dalian : Dalian Jiaotong University , 2020 .
[本文引用: 1]
[20]
孟增 , 李刚 基于修正混沌控制的一次二阶矩可靠度算法
[J]. 工程力学 , 2015 , 32 (12 ): 21 -26 .
[本文引用: 1]
MENG Z LI G Modified chaos control-based first order second moment reliability method
[J]. Engineering Mechanics , 2015 , 32 (12 ): 21 -26 .
[本文引用: 1]
[21]
刘胜利 混合不确定性下平面连杆机构运动精度可靠性分析与优化设计
[D]. 武汉 : 武汉科技大学 , 2023 .
[本文引用: 1]
LIU S L Motion reliability analysis and optimization design of planar linkage mechanisms under hybrid uncertainty
[D]. Wuhan : Wuhan University of Science and Technology , 2023 .
[本文引用: 1]
RV减速器研究现状与展望
1
2016
... RV(rotate vector,旋转矢量)减速器是一种新型的摆线针轮行星传动机构,具有传动精度高、体积小、刚度大、质量小、结构紧凑和传动比大等优点[1 ] ,目前已被广泛应用于机器人、航空航天装备、数控机床和医疗设备等多个领域[2 ] .RV减速器多部件的随机扰动会影响其整体运行稳定性和使用寿命[3 ] .因此,开展RV减速器可靠性评估,对保障机械设备安全运行、降低维护成本和提高经济效益具有重要意义[4 -5 ] . ...
RV减速器研究现状与展望
1
2016
... RV(rotate vector,旋转矢量)减速器是一种新型的摆线针轮行星传动机构,具有传动精度高、体积小、刚度大、质量小、结构紧凑和传动比大等优点[1 ] ,目前已被广泛应用于机器人、航空航天装备、数控机床和医疗设备等多个领域[2 ] .RV减速器多部件的随机扰动会影响其整体运行稳定性和使用寿命[3 ] .因此,开展RV减速器可靠性评估,对保障机械设备安全运行、降低维护成本和提高经济效益具有重要意义[4 -5 ] . ...
RV减速器传动精度预估与退化规律研究
1
2022
... RV(rotate vector,旋转矢量)减速器是一种新型的摆线针轮行星传动机构,具有传动精度高、体积小、刚度大、质量小、结构紧凑和传动比大等优点[1 ] ,目前已被广泛应用于机器人、航空航天装备、数控机床和医疗设备等多个领域[2 ] .RV减速器多部件的随机扰动会影响其整体运行稳定性和使用寿命[3 ] .因此,开展RV减速器可靠性评估,对保障机械设备安全运行、降低维护成本和提高经济效益具有重要意义[4 -5 ] . ...
RV减速器传动精度预估与退化规律研究
1
2022
... RV(rotate vector,旋转矢量)减速器是一种新型的摆线针轮行星传动机构,具有传动精度高、体积小、刚度大、质量小、结构紧凑和传动比大等优点[1 ] ,目前已被广泛应用于机器人、航空航天装备、数控机床和医疗设备等多个领域[2 ] .RV减速器多部件的随机扰动会影响其整体运行稳定性和使用寿命[3 ] .因此,开展RV减速器可靠性评估,对保障机械设备安全运行、降低维护成本和提高经济效益具有重要意义[4 -5 ] . ...
Variance of energy residual (VER): an efficient method for planetary gear fault detection under variable-speed conditions
1
2019
... RV(rotate vector,旋转矢量)减速器是一种新型的摆线针轮行星传动机构,具有传动精度高、体积小、刚度大、质量小、结构紧凑和传动比大等优点[1 ] ,目前已被广泛应用于机器人、航空航天装备、数控机床和医疗设备等多个领域[2 ] .RV减速器多部件的随机扰动会影响其整体运行稳定性和使用寿命[3 ] .因此,开展RV减速器可靠性评估,对保障机械设备安全运行、降低维护成本和提高经济效益具有重要意义[4 -5 ] . ...
Application of nonlinear output frequency response functions and deep learning to RV reducer fault diagnosis
1
2021
... RV(rotate vector,旋转矢量)减速器是一种新型的摆线针轮行星传动机构,具有传动精度高、体积小、刚度大、质量小、结构紧凑和传动比大等优点[1 ] ,目前已被广泛应用于机器人、航空航天装备、数控机床和医疗设备等多个领域[2 ] .RV减速器多部件的随机扰动会影响其整体运行稳定性和使用寿命[3 ] .因此,开展RV减速器可靠性评估,对保障机械设备安全运行、降低维护成本和提高经济效益具有重要意义[4 -5 ] . ...
RV减速器精度寿命的退化与可靠性评估
1
2026
... RV(rotate vector,旋转矢量)减速器是一种新型的摆线针轮行星传动机构,具有传动精度高、体积小、刚度大、质量小、结构紧凑和传动比大等优点[1 ] ,目前已被广泛应用于机器人、航空航天装备、数控机床和医疗设备等多个领域[2 ] .RV减速器多部件的随机扰动会影响其整体运行稳定性和使用寿命[3 ] .因此,开展RV减速器可靠性评估,对保障机械设备安全运行、降低维护成本和提高经济效益具有重要意义[4 -5 ] . ...
RV减速器精度寿命的退化与可靠性评估
1
2026
... RV(rotate vector,旋转矢量)减速器是一种新型的摆线针轮行星传动机构,具有传动精度高、体积小、刚度大、质量小、结构紧凑和传动比大等优点[1 ] ,目前已被广泛应用于机器人、航空航天装备、数控机床和医疗设备等多个领域[2 ] .RV减速器多部件的随机扰动会影响其整体运行稳定性和使用寿命[3 ] .因此,开展RV减速器可靠性评估,对保障机械设备安全运行、降低维护成本和提高经济效益具有重要意义[4 -5 ] . ...
基于Workbench和nCode的摆线轮疲劳寿命及可靠性分析
1
2024
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
基于Workbench和nCode的摆线轮疲劳寿命及可靠性分析
1
2024
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
RV减速器高应力加速退化试验及可靠性分析
1
2022
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
RV减速器高应力加速退化试验及可靠性分析
1
2022
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
考虑强度退化与失效相关性的RV减速器动态可靠性分析
1
2020
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
考虑强度退化与失效相关性的RV减速器动态可靠性分析
1
2020
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
基于多元退化数据的RV减速器可靠性评估
1
2023
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
基于多元退化数据的RV减速器可靠性评估
1
2023
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
考虑失效相关性的行星摆线减速器结构多目标优化设计
1
2022
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
考虑失效相关性的行星摆线减速器结构多目标优化设计
1
2022
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
基于模糊贝叶斯网络的RV减速器可靠性分析
1
2023
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
基于模糊贝叶斯网络的RV减速器可靠性分析
1
2023
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
工业机器人RV减速器失效率可靠性预计评估
1
2022
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
工业机器人RV减速器失效率可靠性预计评估
1
2022
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
RV减速器可靠性优化设计方法
1
2021
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
RV减速器可靠性优化设计方法
1
2021
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
Reliability-based design optimization for RV reducer with experimental constraint
0
2021
Time-variant reliability analysis for industrial robot RV reducer under multiple failure modes using Kriging model
0
2020
考虑摆线轮磨损的RV减速器传动精度可靠性分析与参数优化
1
2022
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
考虑摆线轮磨损的RV减速器传动精度可靠性分析与参数优化
1
2022
... 现阶段,许多学者针对RV减速器的可靠性问题展开了广泛研究.在考虑RV减速器时变特性方面,乔雪涛等[6 ] 基于Workbench和nCode软件对摆线轮的疲劳寿命及可靠性进行了分析;周坤等[7 ] 提出了一种基于高应力加速退化试验与传动精度退化模型的RV减速器可靠性分析方法;杜雪松等[8 ] 同时考虑强度退化和失效相关性,探究了主要设计参数对RV减速器可靠性的影响;李金峰等[9 ] 结合RV减速器传动误差与回差的性能退化试验数据,对其可靠性及预期失效寿命进行了研究.在考虑RV减速器多失效行为方面,郑胜予等[10 ] 构建了考虑多级子部件失效相关性的RV减速器可靠性分析模型;李杰等[11 ] 针对RV减速器可靠性分析中部分故障数据已知以及模糊故障树无法反向推理等问题,提出了一种基于模糊贝叶斯网络的RV减速器可靠性分析模型;白斌等[12 ] 针对RV减速器主要零部件失效概率预测困难的问题,提出了一种基于模糊数学思想的专家评估与多层次分析相结合的可靠性评估方法.在上述RV减速器可靠性分析与评估模型的基础上,国内外学者进一步围绕其可靠性优化问题开展了大量研究[13 -16 ] . ...
考虑动态时变载荷的滚动轴承可靠性寿命评估方法
2
2024
... 尽管RV减速器的可靠性研究已取得显著进展,但当前的可靠性分析与评估大多基于概率理论,即假设不确定因素服从特定的概率分布,这需要大量样本数据来构建准确的分布函数.然而,RV减速器内部结构复杂且失效机理多样,受限于紧凑的内部结构和有限的测量手段,部分不确定参量的样本信息很难大量获取,无法构建准确的概率分布函数.若仍采用理想的概率假定,则会导致可靠性评估不准确甚至错误.此外,RV减速器可靠性的影响因素众多,而考虑多维不确定因素的可靠性分析方法极其复杂,涉及多变量函数的迭代求解,计算成本高且效率低,计算时间远超预期[17 -18 ] . ...
... 当齿面接触应力超过接触疲劳强度时,行星轮失效.基于应力-强度干涉模型[17 ] ,行星轮齿面接触疲劳失效的极限状态函数g 1 可表示为: ...
考虑动态时变载荷的滚动轴承可靠性寿命评估方法
2
2024
... 尽管RV减速器的可靠性研究已取得显著进展,但当前的可靠性分析与评估大多基于概率理论,即假设不确定因素服从特定的概率分布,这需要大量样本数据来构建准确的分布函数.然而,RV减速器内部结构复杂且失效机理多样,受限于紧凑的内部结构和有限的测量手段,部分不确定参量的样本信息很难大量获取,无法构建准确的概率分布函数.若仍采用理想的概率假定,则会导致可靠性评估不准确甚至错误.此外,RV减速器可靠性的影响因素众多,而考虑多维不确定因素的可靠性分析方法极其复杂,涉及多变量函数的迭代求解,计算成本高且效率低,计算时间远超预期[17 -18 ] . ...
... 当齿面接触应力超过接触疲劳强度时,行星轮失效.基于应力-强度干涉模型[17 ] ,行星轮齿面接触疲劳失效的极限状态函数g 1 可表示为: ...
基于概率-区间混合模型的六足机器人运动稳定性优化设计方法
1
2024
... 尽管RV减速器的可靠性研究已取得显著进展,但当前的可靠性分析与评估大多基于概率理论,即假设不确定因素服从特定的概率分布,这需要大量样本数据来构建准确的分布函数.然而,RV减速器内部结构复杂且失效机理多样,受限于紧凑的内部结构和有限的测量手段,部分不确定参量的样本信息很难大量获取,无法构建准确的概率分布函数.若仍采用理想的概率假定,则会导致可靠性评估不准确甚至错误.此外,RV减速器可靠性的影响因素众多,而考虑多维不确定因素的可靠性分析方法极其复杂,涉及多变量函数的迭代求解,计算成本高且效率低,计算时间远超预期[17 -18 ] . ...
基于概率-区间混合模型的六足机器人运动稳定性优化设计方法
1
2024
... 尽管RV减速器的可靠性研究已取得显著进展,但当前的可靠性分析与评估大多基于概率理论,即假设不确定因素服从特定的概率分布,这需要大量样本数据来构建准确的分布函数.然而,RV减速器内部结构复杂且失效机理多样,受限于紧凑的内部结构和有限的测量手段,部分不确定参量的样本信息很难大量获取,无法构建准确的概率分布函数.若仍采用理想的概率假定,则会导致可靠性评估不准确甚至错误.此外,RV减速器可靠性的影响因素众多,而考虑多维不确定因素的可靠性分析方法极其复杂,涉及多变量函数的迭代求解,计算成本高且效率低,计算时间远超预期[17 -18 ] . ...
动车组传动齿轮多失效模式的可靠性分析
1
2020
... 式(15) 的求解涉及概率可靠性和区间不确定性的循环求解.在概率可靠性求解中,当极限状态函数的非线性程度较低时,可采用HL-RF(Hasofer-Lind-Rackwitz-Fiessler)算法;而当极限状态函数的非线性程度较高时,随机变量会在迭代过程中出现振荡,导致计算结果不收敛.针对以上问题,常采用CCM,其迭代求解格式可表示为[19 ] : ...
动车组传动齿轮多失效模式的可靠性分析
1
2020
... 式(15) 的求解涉及概率可靠性和区间不确定性的循环求解.在概率可靠性求解中,当极限状态函数的非线性程度较低时,可采用HL-RF(Hasofer-Lind-Rackwitz-Fiessler)算法;而当极限状态函数的非线性程度较高时,随机变量会在迭代过程中出现振荡,导致计算结果不收敛.针对以上问题,常采用CCM,其迭代求解格式可表示为[19 ] : ...
基于修正混沌控制的一次二阶矩可靠度算法
1
2015
... 然而,在CCM中,迭代步长受到严格的控制,导致其计算效率较低.为解决上述问题,将CCM计算得到的向量n U k + 1 [20 ] .修正后的CCM(MCCM)可表示为: ...
基于修正混沌控制的一次二阶矩可靠度算法
1
2015
... 然而,在CCM中,迭代步长受到严格的控制,导致其计算效率较低.为解决上述问题,将CCM计算得到的向量n U k + 1 [20 ] .修正后的CCM(MCCM)可表示为: ...
混合不确定性下平面连杆机构运动精度可靠性分析与优化设计
1
2023
... 在区间不确定性求解中,涉及多个区间变量的两两组合,需要大量的重复计算.为解决上述问题,根据MDRM[21 ] ,将第k +1个迭代步的极限状态函数g U k + 1 , Y
混合不确定性下平面连杆机构运动精度可靠性分析与优化设计
1
2023
... 在区间不确定性求解中,涉及多个区间变量的两两组合,需要大量的重复计算.为解决上述问题,根据MDRM[21 ] ,将第k +1个迭代步的极限状态函数g U k + 1 , Y





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}