直升机主减速器作为整机动力传动系统的核心部件,其结构精度和齿轮啮合性能直接影响飞机飞行安全与系统可靠性。弧齿锥齿轮因承载能力强、传动平稳、结构紧凑等优点,被广泛应用于航空航天装备的传动系统,尤其在直升机中承担着关键转速和扭矩的传递任务。该类齿轮副具有显著的空间啮合特性,几何参数复杂,齿面干涉敏感,对载荷和位置的偏差及制造误差呈高度非线性响应,导致啮合刚度、传动误差及接触特性变化剧烈[1 ] 。这些变化不仅影响着齿轮动力传递效率和齿面服役寿命,还可能诱发系统响应异常和结构疲劳累积,因此对齿轮系统的服役可靠性提出了建模与预测要求。实现弧齿锥齿轮副的高精度建模及关键性能参数的识别与估计,已成为提升直升机传动系统工程适应性与健康管理水平的关键基础。
为了提升直升机传动系统的可靠性及其预测能力,健康与使用监测系统已在多机型中得到部署。其通过加速度传感器采集振动数据,用于早期故障的检测与寿命管理[2 ] 。近年来,学者们围绕信号分析与故障诊断方法开展了大量研究。如:王轩等[3 ] 通过扭振信号分析揭示了行星齿轮箱的典型故障模式,Elasha等[4 ] 提出了用于早期故障识别的新型状态指标,Zhou等[5 ] 借助包络分析完成了主减速器轴承缺陷检测,许华超等[6 ] 则通过代理模型与灵敏度分析实现了结构减振优化。这些研究在信号特征提取与建模诊断等方面取得了一定进展,但受限于传感器布设、信噪比及工况扰动,在强非线性、多耦合背景下所采用传统方法的适应性与鲁棒性存在不足,尤其在振动状态预测与多变量耦合建模等方面面临瓶颈。
数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] 。近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] 。针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] 。同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] 。总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题。因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑。
针对直升机主减速器这类多级啮合系统,构建高保真虚实映射模型与实现多源数据融合预测仍是核心难题[30 ] 。相关研究指出[31 -32 ] :提升工业级数字孪生的关键在于深度融合设备机理与运行数据,形成具备物理可解释性与数据适应性的统一模型体系;构建基于机理-数据的维护性建模策略,以兼顾模型预测精度与结构透明度。
为了实现对直升机主减速器核心部件——弧齿锥齿轮系统的高精度建模,需引入加载齿面接触分析及动力学联合建模方法[33 -35 ] ,而数据驱动方法为非线性状态建模提供了一种新的建模手段[36 -40 ] 。针对直升机主减速器弧齿锥齿轮系统存在的关键激励不可测、机理模型与实测信号难以形成闭环映射、复杂工况适应性不足等问题,本文提出了物理路径与数据路径并行的弧齿锥齿轮系统振动预测数字孪生框架。首先,基于齿面测量点云构建齿面误差场,并在典型载荷下开展齿面接触分析,得到随啮合相位变化的时变啮合刚度与综合传动误差;其次,将时变啮合刚度与综合传动误差作为时变激励输入扭转动力学模型,计算得到具有明确机理含义的振动响应特征;最后,引入贝叶斯优化的XGBoost(eXtreme Gradient Boosting,极限梯度提升)模型BO-XGBoost,建立机理特征与振动响应之间的映射关系,实现从可测振动信号到不可测关键激励影响的间接表征。本文的贡献主要体现在以下三方面:一是贯通了齿面接触分析与动力学仿真求解,形成了可获取关键激励的输出链路;二是提出了基于实测振动加速度的机理特征映射方法,提升了模型可解释性与鲁棒性;三是在台架数据验证下给出了可复现的建模流程,为直升机主减速器振动监测与性能评估提供了支撑。
1 弧齿锥齿轮系统振动预测孪生方法
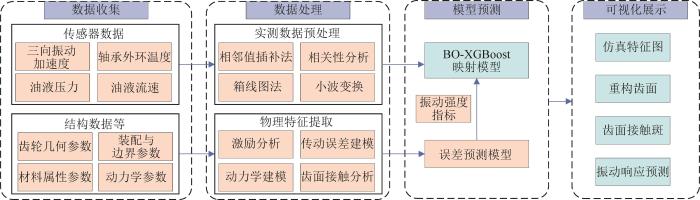
为了实现对直升机主减速器弧齿锥齿轮系统振动状态的高精度建模与预测,本文构建了基于物理机理与数据驱动的振动预测数字孪生框架,如图1 所示。预测路径为:首先,基于齿面接触分析与系统动力学仿真,构建高保真物理模型,提取不同工况下的齿轮副啮合刚度、传递误差及输出轴振动强度指标,来表征系统在理想条件下的固有振动特性;其次,将动力学仿真获得的振动强度指标作为先验特征,将其与实测转速、扭矩、温度等多源运行数据融合,构建BO-XGBoost振动预测模型,实现复杂工况下输出轴三向振动的快速精准预测。该框架通过动力学特征引导数据驱动实现融合建模,既提升了模型的物理可解释性,又保证了基于实测数据模型的预测精度与泛化能力,最终支撑直升机传动系统数字孪生体的高可信构建,并为其状态预警与评估提供可靠依据。
图1
图1
弧齿锥齿轮系统振动预测数字孪生框架
Fig.1
Digital twin framework for vibration prediction of spiral bevel gear system
1.1 多源数据构成
直升机传动系统涉及多个关键部件,如输入轴、主减速器和输出轴等,系统的运行状态受多种因素影响。为实现对这些因素的全面监控,数字孪生系统必须能够处理不同来源的数据。这些数据包括:
1)设计制造数据。包括齿轮几何参数(如模数、齿数、压力角),材料属性参数(如弹性模量、泊松比),装配公差,轴系结构参数(如轴径、支撑刚度),轴承型号与游隙,加工精度(如齿面粗糙度、形位公差),热处理后记录的数据(如表面硬度、残余应力)和装配工艺参数(如螺栓预紧力、动平衡测试结果)等。
2)仿真数据。通过有限元分析和动力学仿真获得的齿轮啮合过程中的应力、刚度、变形等数据,用于表征齿轮系统的动力学特性。
3)传感器数据。① 振动传感器数据。实时采集传动系统的三轴振动信号,监测振动幅度和频率特征。② 温度传感器数据。监测传动系统关键部件的温度变化,反映热负荷和潜在的过热问题。③ 油液传感器数据。其包括油液的质量、压力和流量信息,有助于评估齿轮系统的润滑状态。④ 压力传感器数据。监测系统各部分的压力变化,辅助判断系统的负荷状态。
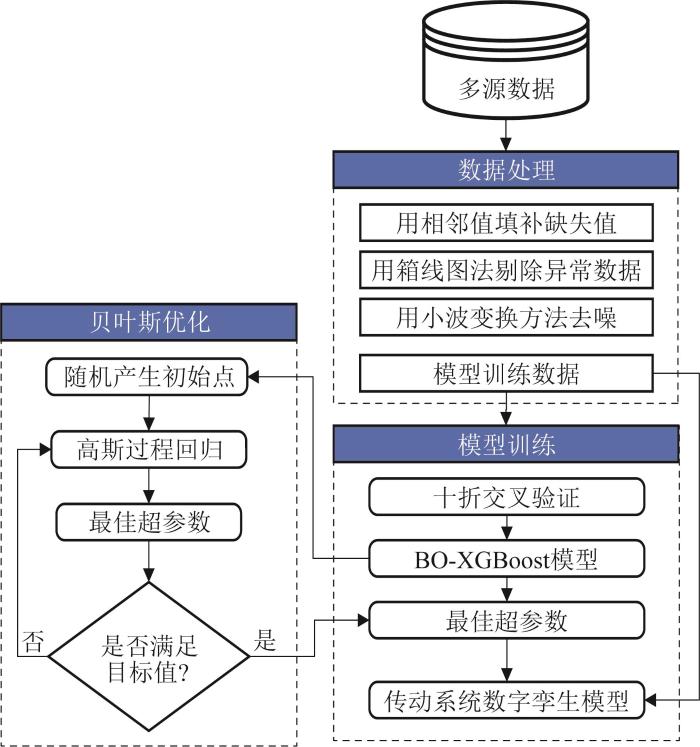
为了保证数据的质量,所有不同来源的仿真数据和传感器数据都需要进行预处理,以确保其在训练过程中能够产生可靠的结果。用相邻值插补法对缺失数据进行填充,以确保数据的完整性。若某一时间点的数据缺失,则用其前后两个时刻数据的均值进行填充。对于不在常规波动范围内的数据(如突发噪声或由传感器故障导致的波动),用箱线图法进行异常值检测和剔除,避免其对模型训练产生不良影响。用小波变换方法对振动信号进行去噪处理,保留振动信号的主要特征,去除高频噪声成分。
1.2 齿轮副接触分析与动力学响应输出
直升机传动系统弧齿锥齿轮副在啮合过程中呈现显著的啮合频率周期性变化,同时,由于大锥角与交错轴的空间几何关系,其啮合力在轴向、径向和切向均存在显著分量,易诱发多向耦合振动。齿轮系统的激励通常可分为外激励与内激励两类。外激励主要来源于发动机输出扭矩波动、旋翼载荷扰动以及旋转部件不平衡与不对中引起的周期性支承载荷。内激励则主要由齿轮啮合过程中的啮合刚度与传动误差时变构成,其中传动误差对齿面几何偏差和装配误差高度敏感。本文采用三坐标测量机获取齿面点云数据并构建齿面误差曲面,在此基础上建立齿面几何误差与传动误差的映射关系,从而得到由齿面几何误差主导的静态传动误差输入。
为了进一步刻画载荷作用下的齿面接触变形与应力分布,本文用齿面接触分析方法求解不同啮合相位和不同载荷条件下的齿面变形、接触应力以及加载传动误差,并提取时变啮合刚度。在高速重载工况下,齿面承受高接触应力,轮齿接触区发生弹性变形,啮合刚度受载荷和齿面弹性特性调制。当双齿对啮合与单齿对啮合交替出现时,载荷承担发生周期性切换,导致接触应力和啮合刚度产生交变,从而形成明显的啮合冲击和振动激励。另一方面,齿轮制造与装配误差引起的综合传动误差可等效为啮合线方向的周期性位移扰动,可近似表示为啮合频率及谐波叠加形式:
e ( t ) = ∑ n = 1 N e n c o s ( n ω m t + φ n ) (1)
式中:e ( t ) e n n ω m φ n n N
该误差激励等效为在齿间引入一个周期性变化的微小相对位移,使啮合力出现动态波动,即形成啮合激励力。此外,弧齿锥齿轮副特有的大锥角与交错轴的空间几何关系,使得啮合力在空间上具有显著的多向分量,这进一步加剧了系统的耦合振动。具体来说,小齿轮对大齿轮施加的沿啮合线方向的作用力可分解为沿大齿轮轴向的推力和垂直于轴向的径向力。这些分力通过轴承座传递给机匣,引发齿轮箱轴向和径向振动。因此,相对于平行轴齿轮系统,弧齿锥齿轮副在运行中表现出多向振动的特性。此外,高转速下的微小不平衡和轴系偏心也会诱发横向振动,其与扭转振动耦合,使得系统振动响应更加复杂。
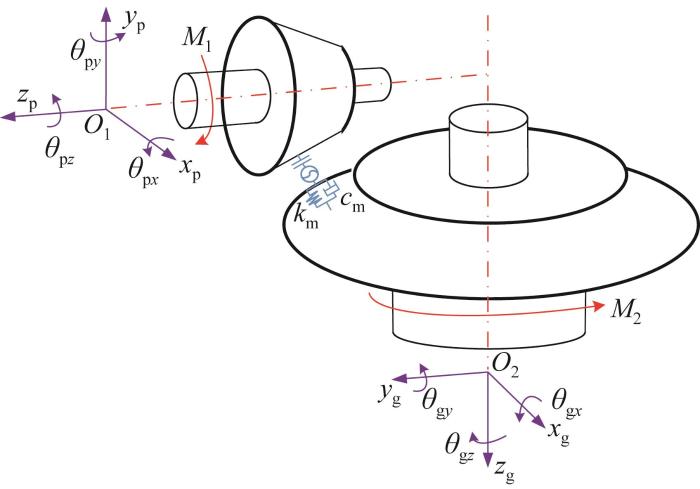
为了描述上述激励在系统层面的传递与耦合,本文将齿轮副抽象为刚性转子小齿轮和大齿轮,并采用集中质量法建立12自由度的动力学模型,如图2 所示。
图2
图2
转子系统动力学模型
Fig.2
Dynamics model of rotor system
在小齿轮和大齿轮上分别建立右手直角坐标系O 1 -X p Y p Z p 、O 2 -X g Y g Z g 。其中:Z p 、Z g 向为齿轮轴线的正向,Y p 、Y g 向为切向(轮齿通过啮合点的运动方向),X p 、X g 向为径向(法平面内与Y 向正交的方向)。将2个刚体的自由度组合,可得到12维广义位移向量:
q = [ x p y p z p θ p x θ p y θ p z x g y g z g θ g x θ g y θ g z ] T (2)
式中:(x p , y p , z p )、(x g , y g , z g ) 分别为小、大齿轮的质心在局部坐标系下的平动位移,(θ p x θ p y θ p z θ g x θ g y θ g z
包含质量矩阵 M C K G Ω F
M q ¨ + ( C + G ( Ω ) ) q ˙ + K q = F (3)
该方程完整描述了包含支撑、轴系柔性、陀螺效应等的系统动力学。为聚焦于齿轮副啮合产生的扭转振动特性,并建立其与前述激励的直接联系,将转子系统动力学模型进行如下简化:忽略轴系的平动及弯曲变形,将小齿轮和大齿轮视为具有转动惯量的刚性转子通过时变弹簧连接的系统:小齿轮和大齿轮的转动惯量分别为J p J g C p C g c m 描述齿间的能量耗散。齿轮啮合刚度k m 的取值可通过能量法和赫兹接触理论计算得到,其主要由齿轮齿根弯曲变形、齿面接触变形以及轴承/轴的弹性变形等柔性效应综合决定。
选取仿真后半段为稳态段。记稳态段对应的时间索引区间为[j s , j e ],则稳态轴向加速度序列为a s, z tj ), j =j s , …, j e ,共Na 个加速度,则稳态段加速度的均方根A RMS 为:
A R M S = 1 N a ∑ j = j s j e a s , z ( t j ) 2 (4)
本文用Newmark法进行数值积分,获得加速度响应。为形成可用于监测与学习的机理指标,选取与试验时传感器位置与方向一致的观测通道,在稳态段内计算加速度均方根,作为振动强度指标,并与工况参数共同输入BO-XGBoost映射模型,实现几何误差到接触激励再到系统振动响应的全链条机理建模与数据驱动的融合预测。
1.3 基于BO-XGBoost 的数据驱动建模与振动预测
在XGBoost回归框架基础上,结合贝叶斯优化机制提升模型性能与泛化能力,从而构建具备高精度与良好鲁棒性的数字孪生映射模型。模型构建流程如图3 所示。
图3
图3
传动系统数字孪生模型构建流程
Fig.3
Construction process of digital twin model for transmission system
1.3.1 建模流程
建模流程包括数据预处理、特征构造与筛选、超参数搜索空间设定、贝叶斯优化寻优以及模型训练与验证等。
1)数据预处理。对原始运行监测数据进行缺失值填补、异常值剔除和归一化处理。
2)特征构造与筛选。融合齿轮啮合机理与台架试验数据,构造基于机理的组合特征。
3)超参数搜索空间设定。在防止过拟合和提升泛化能力的前提下设定合理的搜索区间。
4)贝叶斯优化。基于高斯过程与采集函数,在有限评估次数内高效探索最优超参数组合。
1.3.2 XGBoost回归模型
XGBoost是一种加法模型,通过迭代构建多个弱学习器(通常是决策树),并将它们组合成一个强学习器。其目标函数由损失函数和正则化项两部分组成。目标函数的表达式如下:
L ( ϕ ) = ∑ i l ( y i , y ^ i ) + ∑ k Ω ( f k ) (5)
式中:L ( ϕ ) y i i 个样本的真实值;y ^ i i 个样本的预测值;l ( y i , y ^ i ) Ω ( f k ) k 棵树的正则化项,用于控制模型的复杂度,防止过拟合。
XGBoost通过梯度提升的方式逐步优化目标函数。假设在第s 次迭代时,模型的预测值为:
y ^ i s = y ^ i ( s - 1 ) + f s ( x i ) (6)
式中:y ^ i ( s - 1 ) s -1次迭代的预测值;f s ( x i ) s 棵树的预测值。
将上述表达式代入目标函数,得到第s 次迭代的目标函数:
L s = ∑ i l y i , y ^ i ( s - 1 ) + f s ( x i ) + Ω ( f s ) (7)
为了简化优化过程,XGBoost对目标函数进行二阶泰勒展开,并去除常数项,得到近似目标函数:
L s ≈ ∑ i g i f s ( x i ) + 1 2 h i f s 2 ( x i ) + Ω ( f s ) (8)
式中:g i = ∂ l y i , y ^ i ( s - 1 ) / ∂ y ^ i ( s - 1 ) h i = ∂ 2 l y i , y ^ i ( s - 1 ) / ∂ y ^ i ( s - 1 ) 2
XGBoost的正则化项Ω ( f s )
Ω ( f s ) = γ T + 1 2 λ ∑ j = 1 T w j 2 (9)
式中:T w j j 个叶子节点的权重;γ λ
L s = ∑ i g i f s ( x i ) + 1 2 h i f s 2 ( x i ) + γ T + 1 2 λ ∑ j = 1 T w j 2 (10)
对于每个叶子节点j ,定义其样本集合为I j = { i | q ( x i ) = j } w j 式(11)得到:
w j = - ∑ i ∈ I j g i ∑ i ∈ I j h i + λ (11)
该机制不仅保证了收敛效率,还在结构层面对过拟合进行了抑制。
在直升机传动系统建模中,XGBoost以其非线性特征组合能力尤为适合处理多源监测信号之间的耦合关系,如转速、扭矩、温度与多向振动加速度之间的复杂相互作用。
1.3.3 贝叶斯优化超参数寻优策略
为了进一步提升XGBoost模型的性能,采用贝叶斯优化算法对XGBoost的超参数进行优化。贝叶斯优化是一种基于概率模型的全局优化方法,通过构建目标函数的概率模型(通常使用高斯过程(Gaussian process, GP)),并利用采集函数选择下一个待评估的超参数组合,从而高效地搜索超参数空间。
GP是一种用于构建目标函数的概率模型。假设目标函数f ( x )
f ( x ) ∼ G P ( m ( x ) , k ( x , x ' ) ) (12)
式中:m ( x k ( x , x ' ) x x ′ 之间的相似性。
采集函数用于选择下一个待评估的超参数组合。常用的采集函数有期望改进(expected improvement, EI)等。
E I ( x ) = E m a x ( 0 , f ( x ) - f ( x + ) ) (13)
通过最大化EI值,贝叶斯优化能够选择最有潜力的超参数组合来进行评估。
在每轮优化中,先最大化EI值来获取下一个候选超参数组合,随后在真实模型上评估性能,并将结果更新至GP模型,直至达到预设迭代数或收敛条件。
该策略可显著降低对大规模网格搜索的依赖,提升调参效率,并在振动预测任务中获得更优的泛化性能。
1.3.4 评价指标
为了评估模型的预测精度,本文采用均方根误差E RMS 和决定系数R ²为评价指标。E RMS 值越小,表明模型的预测精度越高。上述评价指标可有效衡量预测模型的精度与泛化性能,指导后续模型调优。
2 案例研究
2.1 试验平台搭建
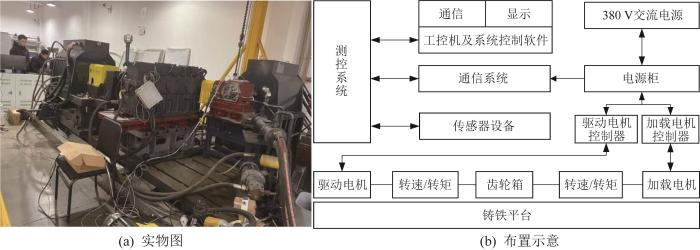
搭建的传动系统振动试验平台如图4 所示,试验在闭式传动系统台架上进行。通过变频电机施加不同水平的输入转速和扭矩,并在稳态段叠加载荷波动与热态变化,以尽可能模拟直升机传动系统在实际飞行过程中的典型运行状态与扰动特征。试验工况:输入转速为0~20 900 r/min,输入扭矩为0~750 N·m。转速在系统启动后逐步提高直至进入额定转速附近的稳定运行区间。在稳态段通过设置不同扭矩水平并叠加小幅波动来模拟飞行中功率需求变化与扰动作用,同时同步记录冷却液温度和轴承温度的变化,使数据包含载荷变化和热态变化的耦合影响。主减速器采用一对弧齿锥齿轮传动,实现输入轴至输出轴的角度传递与速比转换。为精确监测系统在运行过程中的振动响应,在输入轴/输出轴两端分别安装了三轴振动加速度传感器,用于采集轴系在水平、垂直、轴向三个方向的振动加速度;同时,在关键轴承的外圈钻孔,埋入热电偶传感器,实现对运行过程中温度变化的监测。所有传感器信号通过高精度同步采集系统进行统一采集与记录,为后续建模与健康状态分析提供数据支持。
图4
图4
传动系统振动试验平台
Fig.4
Vibration test platform for transmission system
2.2 齿轮副接触分析与误差预测
利用接触仿真软件开展齿面接触分析并进行动力学分析,为后续机理-数据融合建模提供理论基础及数据支撑。
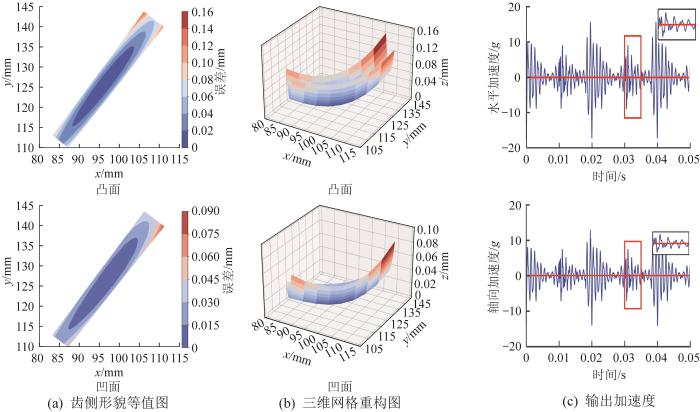
为了深入评估齿轮副在典型工况下的啮合状态与误差响应,本文利用接触仿真软件对一级锥齿轮副开展齿面接触分析,结果如图5 所示。
图5
图5
齿面接触分析结果
Fig.5
Results of tooth surface contact analysis
图5 (a)和图5 (b)反映了齿面在局部坐标系下的空间形貌特征。由图可知,齿面中部存在较为连续的低值带区域,齿顶及边缘位置的误差值较大,表明齿面形貌呈现明显的中部偏差平缓、边缘偏差较大的空间分布特征。该分布说明齿面中部更接近理论接触区域,易形成较为稳定的有效承载带,而边缘区域因修形或偏差量较大,在正常工况下不易优先接触,而在载荷增大或装配误差作用下可能诱发接触带偏移及与边缘接触。图5 (a)上下两图在误差幅值和边缘梯度上存在差异,表明不同齿侧或不同状态下齿面形貌特征不一致,这将进一步影响时变啮合刚度、传动误差及系统振动响应。图5 (c)给出了基于实际运行工况的振动响应计算结果。
在设定的转速和扭矩工况下,首先通过齿面接触分析和加载接触分析获得啮合参数和传递误差,并将其映射为时间域激励,随后在12自由度弧齿锥齿轮系统动力学模型中采用Newmark-β 数值积分求解系统响应。选用平均加速度格式以获得无条件稳定性,取β N = 0.25 γ N = 0.5 Δ t k (t )和e t
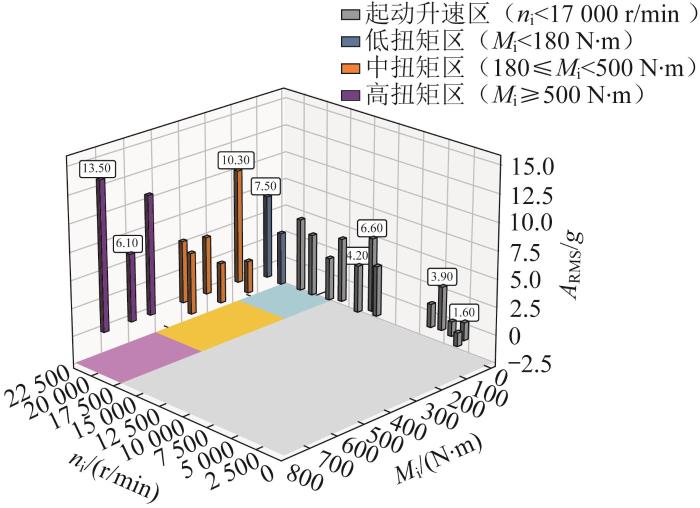
为了表征主减速器齿轮系统在不同工况下的振动响应水平,提取稳态段加速度均方根A RMS 作为振动强度指标,并结合直升机传动系统的实际运行工况进行分区统计。将工况划分为转速n i 为主导的启动升速区和扭矩M i 为主导的3个稳态负载区。各工况下振动强度指标统计结果如图6 所示。由图可知,A RMS 随扭矩水平的提高整体呈上升趋势,高扭矩工况下的响应更为显著,体现了高负载条件下啮合激励对系统响应的增强效应。
图6
图6
各工况下振动强度指标
Fig.6
Vibration intensity indices under different operating conditions
进一步地,将3个扭矩主导工况下的A RMS 作为后续振动预测建模与评价的重要依据,用于支撑不同负载水平下预测模型的构建与对比分析,从而使预测结果能够对应实际运行工况的典型功率需求。
2.3 多源试验数据采集与预处理
基于试验平台共采集20 000组多源运行数据样本。将数据集在原有工况参数的基础上进行了扩充,包括输入转速n i ,输入扭矩M i ,进口压力p i ,进口流量q i ,进口温度T i ,轴承温度(1#热电偶温度T 1 、2#热电偶温度T 2 、3#热电偶温度T 3 )等输入端工况参数和环境参数,以及水平、垂直、轴向输出加速度实测值a o, h 、a o, v 、a o, a 。进一步地,在各工况下运行弧齿锥齿轮系统动力学模型,计算得到各工况下的A RMS ,并将它作为新增输入特征逐点插入实测数据集,从而形成融合物理特征与实测数据的增强数据集。需要指出的是:受台架功率与安全边界约束,高扭矩工况下接近上限的样本相对稀疏,但在重复加载试验中均有覆盖;为避免样本不均衡导致评估偏差,后续训练集与测试集的划分采用基于工况分区的分层抽样策略,确保高扭矩样本在训练与测试中均能覆盖,从而增强模型在高载工况下的可靠性与可比性。温度被纳入输入特征,使模型能够表征载荷波动与热态演化对振动响应的耦合影响。数据集如表2 所示。
在实际采集过程中,受传感器精度、信号干扰及试验工况扰动等因素的影响,原始数据中不可避免地存在缺失值、异常值及高频噪声。为确保数据质量,需要对原始数据进行系统化的优化处理。
针对缺失数据,采用相邻值插补法,即用缺失值前后两个相邻观测点的均值进行填补,确保数据序列的连续性与物理合理性。
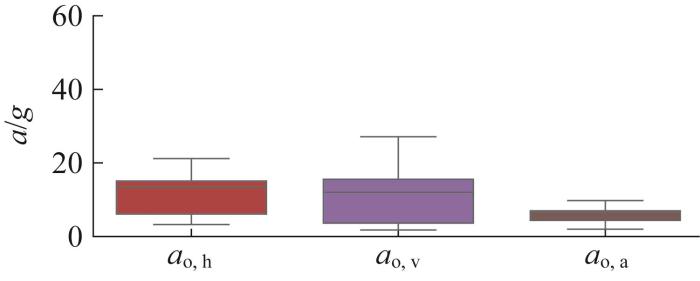
为了剔除极端扰动下的离群点,通过比较3σ准则、K近邻密度算法和箱线图法,最终采用更稳健、适用于非正态分布样本的箱线图法。与3σ准则假设数据服从正态分布不同,箱线图法具有更强的鲁棒性与计算简洁性,其通过计算上四分位数Q 3 与下四分位数Q 1 间的距离(Q 3 -Q 1 ),确定正常数据区间为[Q 1 -1.5 (Q 3 -Q 1 ), Q 3 +1.5 (Q 3 -Q 1 )],超出该范围的数据即视为异常点而被删除。应用该方法后,共剔除4 000个极端异常样本,保留16 000条高质量有效数据,用于模型训练与验证。其中,按照8∶2的比例划分训练集与验证集。剔除异常值后振动数据箱线图如图7 所示。
图7
图7
振动数据箱线图
Fig.7
Box plots of vibration data
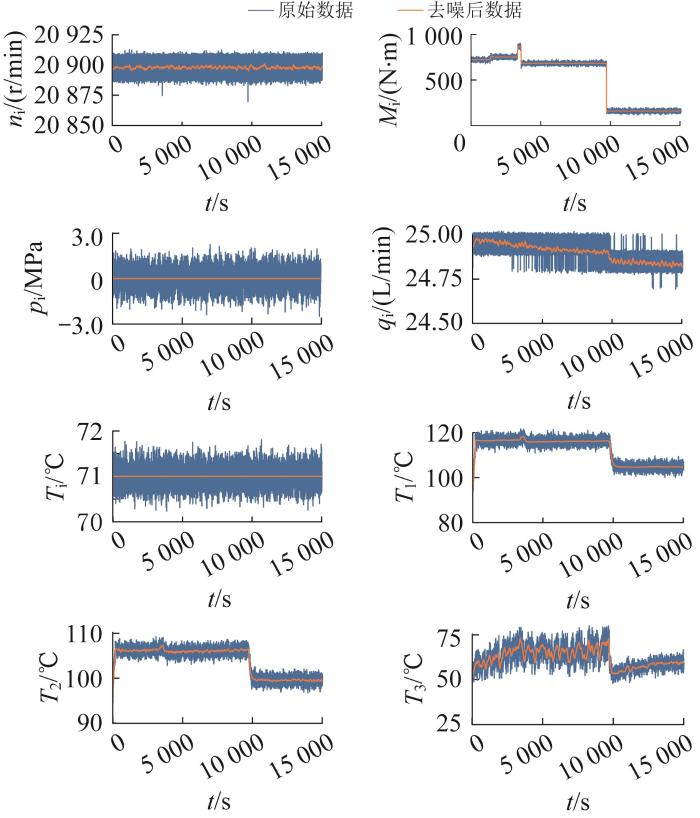
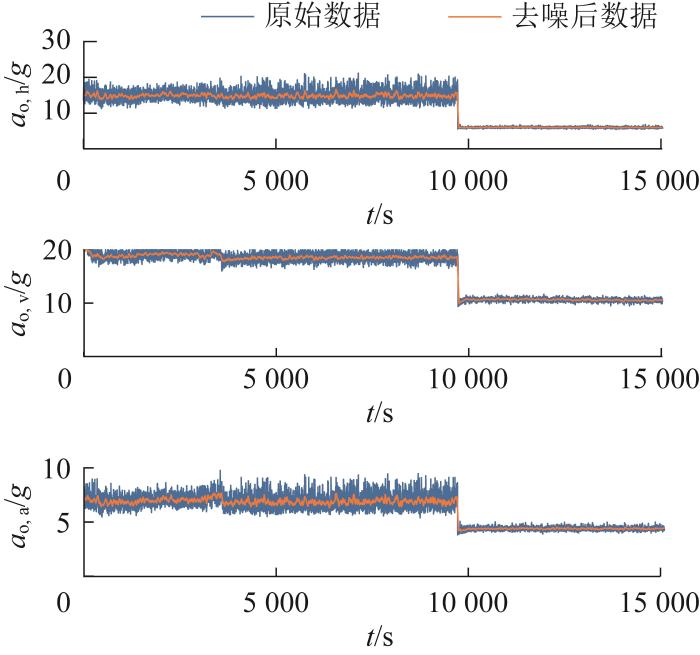
针对工况参数和振动数据中的高频噪声,用小波变换方法进行去噪。该方法兼具时频局部分析能力,适用于非平稳信号处理。本文选取Daubechies小波基,结合软阈值法对数据进行多层分解与重构,有效去除高频干扰信号,保留了信号的主要趋势与特征,如图8 和图9 所示。
图8
图8
工况参数去噪前后对比
Fig.8
Comparison of operating condition parameters before and after denoising
图9
图9
振动数据去噪前后对比
Fig.9
Comparison of vibration data before and after denoising
2.4 关键工况特征筛选与关联性分析
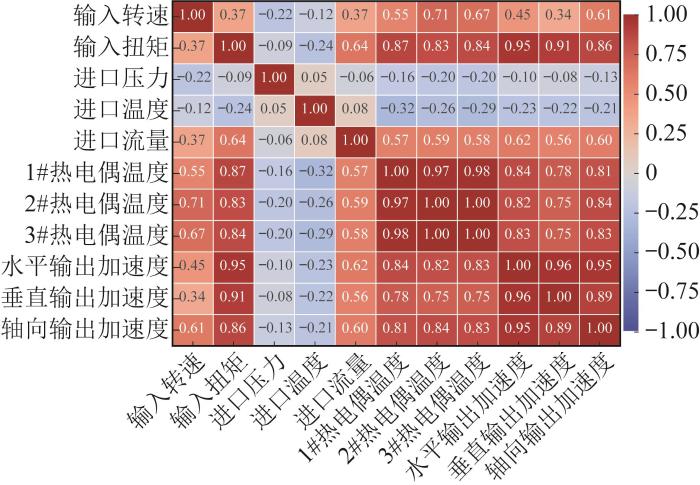
为了提升建模效率并避免冗余特征影响模型泛化能力,进一步采用皮尔逊(Pearson)相关系数分析方法对输入变量与各向输出加速度间的线性相关性进行量化分析。相关系数计算公式如下:
r ( X , Y ) = C ( X , Y ) s X s Y (14)
式中:r ( X , Y ) C ( X , Y ) X Y s X s Y X Y
设定相关性阈值| r | 图10 所示。
图10
图10
各参数间的 Pearson 相关系数
Fig.10
Pearson correlation coefficients among parameters
由图10 可知:输入扭矩与3个方向的输出加速度均呈强相关(r 值最高达0.96),为主导影响因子;所有热电偶的温度也具有较高相关性,说明温度变化对系统振动特性具有重要影响。尽管输入转速与水平、垂直输出加速度的相关性较弱,但鉴于其在物理机制中的重要性,仍被保留作为关键输入。
综合相关性分析结果,最终选取输入转速、输入扭矩、进口流量和热电偶温度作为振动预测模型的输入特征参数。
2.5 基于BO-XGBoost 的振动预测模型
4)用测试集评估模型性能,验证其在不同振动工况下的预测效果。
XGBoost超参数的最优配置通过贝叶斯优化实现。超参数的搜索范围及最优值如表3 所示。
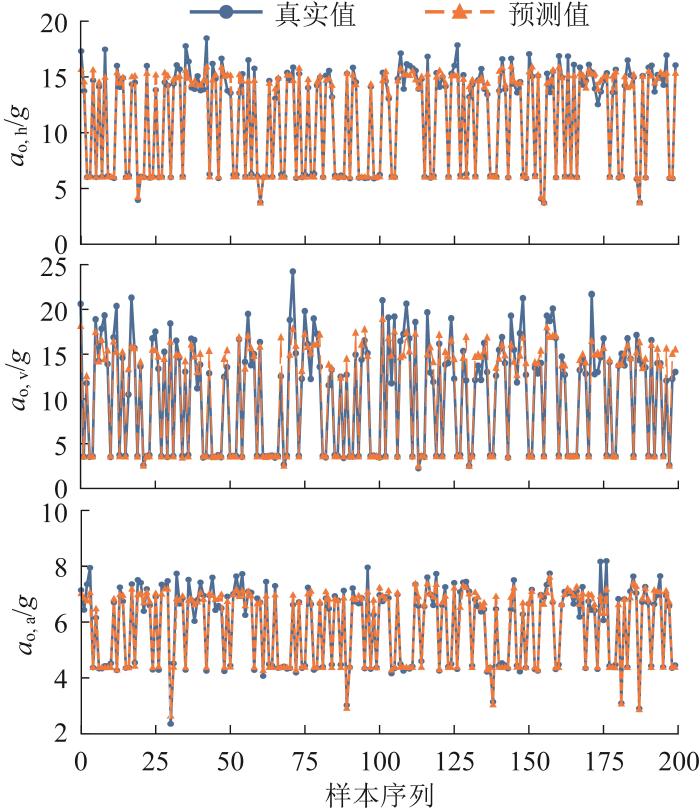
模型验证数据来源于耐久性试验的后期阶段。试验约累计运行400 h后齿面出现轻微磨损,处于典型的退化早期状态。相较于初始健康状态,该阶段的数据已包含了由微小齿面形貌演化引起的接触状态变化与振动响应差异带来的影响,因此模型验证结果不仅能反映模型在常规运行工况下的预测能力,也在一定程度上体现了对早期退化状态的适用性与敏感性。从测试集中选取200个具有代表性的样本,模型预测结果如图11 所示。
图11
图11
测试集预测结果
Fig.11
Prediction results on test set
由图11 可知:预测曲线与实测曲线在多数样本点上拟合良好,尤其在低振动幅值区间具有较高一致性;在部分高振动幅值区间存在一定偏差,说明在该区间振动响应的非线性增强更为显著,且受到瞬态载荷波动与热态演化耦合作用的影响,从而增大了预测难度。
模型预测性能指标如表4 所示。由表可知,模型具有较强的回归能力。R 2 >0.92,E RMS 均处于较低水平,表明模型的预测值与实测值偏差较小,模型具备良好的泛化性能与工程实用价值。
2.6 不同模型预测性能对比
为了评估所提出的机理特征引导的回归模型的振动预测性能,本文选取了传统机器学习与深度学习两类代表性方法进行对比。
在树模型方面,以BO-XGBoost模型为基础,引入由动力学模型计算得到的振动强度指标作为机理特征,构建BO-XGBoost+Mech模型,用以检验机理特征对预测精度的增益贡献。针对传统非线性回归,选取支持向量回归(support vector regression, SVR)作为核方法基线。针对深度学习,选取LSTM(long short-term memory,长短期记忆)和GRU(gated recurrent unit,门控循环单元)作为序列建模基线,用于对比不同模型范式的预测效果。由于LSTM和GRU需基于滑动窗口构造序列样本,边界样本会被舍弃,导致有效样本量可能略少。各模型均在同一测试工况下进行预测,预测性能指标如表5 所示。
由表5 可知,BO-XGBoost+Mech模型在三向振动预测中均取得最优效果。其R 2 值均高于其他模型,E RMS 均低于其他模型,说明引入振动强度指标能够增强模型对不同负载扭矩水平响应差异的表征能力,从而提升其预测精度与稳定性。
3 结 论
本文面向直升机主减速器齿轮系统振动预测与状态监测的需求,提出了一种融合加载接触分析与数据驱动的数字孪生建模方法。主要结论如下:
1)针对关键物理量不可测的问题,本文建立了从齿面测量到误差建模,再到接触分析与动力学求解的可计算链路,得到了啮合刚度k (t )和传动误差e (t ),并进一步构造了稳态振动强度指标,使数字孪生模型具备明确的物理可解释性与可追溯性。
2)基于BO-XGBoost构建了机理特征与多源工况参数融合的映射模型,基于台架试验数据实现了输出轴三向振动的高精度预测,预测性能指标表明模型在稳态工作区间具有良好的泛化能力与工程适用性。
3)多种模型的预测结果对比显示,模型引入振动强度指标后,其预测精度与峰值误差抑制等方面相比仅依赖工况参数的模型更优,说明机理先验特征能够增强模型对不同负载扭矩水平响应差异的表征能力。
本文链接: https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.257
参考文献
View Option
[1]
SEO M K YUN W Y Gearbox condition monitoring and diagnosis of unlabeled vibration signals using a supervised learning classifier
[J]. Machines , 2024 , 12 (2 ): 134 .
[本文引用: 1]
[2]
ELASHA F GREAVES M MBA D Planetary bearing defect detection in a commercial helicopter main gearbox with vibration and acoustic emission
[J]. Structural Health Monitoring , 2018 , 17 (5 ): 1192 -1212 .
[本文引用: 1]
[4]
ELASHA F GREAVES M MBA D Diagnostics of a defective bearing within a planetary gearbox with vibration and acoustic emission
[M]//Advances in Condition Monitoring of Machinery in Non-Stationary Operations . Cham : Springer International Publishing , 2015 : 399 -412 .
[本文引用: 1]
[5]
ZHOU L H DUAN F CORSAR M et al A study on helicopter main gearbox planetary bearing fault diagnosis
[J]. Applied Acoustics , 2019 , 147 : 4 -14 .
[本文引用: 1]
[6]
许华超 , 朱豪杰 , 韩振华 , 等 基于代理模型和敏感度分析的直升机主减速器减振优化
[J]. 航空动力学报 , 2024 , 39 (11 ): 20220884 .
[本文引用: 1]
XU H C ZHU H J HAN Z H et al Vibration reduction optimization for helicopter’s main gearbox based on surrogate model and sensitivity analysis
[J]. Journal of Aerospace Power , 2024 , 39 (11 ): 20220884 .
[本文引用: 1]
[7]
INTURI V GHOSH B RAJASEKHARAN S G et al A review of digital twinning for rotating machinery
[J]. Sensors , 2024 , 24 (15 ): 5514 .
[本文引用: 1]
[8]
ZHONG D XIA Z L ZHU Y A et al Overview of predictive maintenance based on digital twin technology
[J]. Heliyon , 2023 , 9 (4 ): e14534 .
[9]
HU W F ZHANG T Z DENG X Y et al Digital twin: a state-of-the-art review of its enabling technologies, applications and challenges
[J]. Journal of Intelligent Manufacturing and Special Equipment , 2021 , 2 (1 ): 1 -34 .
[本文引用: 1]
[10]
LU Y Q LIU C WANG K I et al Digital twin-driven smart manufacturing: connotation, reference model, applications and research issues
[J]. Robotics and Computer-Integrated Manufacturing , 2020 , 61 : 101837 .
[本文引用: 1]
[11]
CUI Z X YANG X L YUE J G et al A review of digital twin technology for electromechanical products: evolution focus throughout key lifecycle phases
[J]. Journal of Manufacturing Systems , 2023 , 70 : 264 -287 .
[12]
WANG J J YE L K GAO R X et al Digital twin for rotating machinery fault diagnosis in smart manufacturing
[J]. International Journal of Production Research , 2019 , 57 (12 ): 3920 -3934 .
[13]
TAO F ZHANG C Y QI Q L et al Digital twin maturity model
[J]. Computer Integrated Manufacturing Systems , 2022 , 28 (5 ): 1267 -1281 .
DOI:10.13196/j.cims.2022.05.001
[14]
陶飞 , 刘蔚然 , 张萌 , 等 数字孪生五维模型及十大领域应用
[J]. 计算机集成制造系统 , 2019 , 25 (1 ): 1 -18 .
TAO F LIU W R ZHANG M et al Five-dimension digital twin model and its ten applications
[J]. Computer Integrated Manufacturing Systems , 2019 , 25 (1 ): 1 -18 .
[15]
[本文引用: 1]
HU W F FANG J H LIU F X et al Real-time state mirror-mapping for driving and bolting integration equipment based on digital twin
[J]. Journal of Hunan University (Natural Sciences) , 2022 , 49 (2 ): 1 -12 .
DOI:10.16339/j.cnki.hdxbzkb.2022151
[本文引用: 1]
[16]
LIU W M HAN B ZHENG A Y et al Fault diagnosis for reducers based on a digital twin
[J]. Sensors , 2024 , 24 (8 ): 2345 .
[本文引用: 1]
[17]
MATANIA O BECHHOEFER E BORTMAN J Digital twin of a gear root crack prognosis
[J]. Sensors , 2023 , 23 (24 ): 9883 .
[18]
ZHOU X HE S X DONG L T et al Real-time prediction of probabilistic crack growth with a helicopter component digital twin
[EB/OL]. 2021 : arXiv : 2105 . 03668 .
URL
[19]
HUANG Y F TAO J SUN G et al A novel digital twin approach based on deep multimodal information fusion for aero-engine fault diagnosis
[J]. Energy , 2023 , 270 : 126894 .
[20]
MOGHADAM F K NEJAD A R Online condition monitoring of floating wind turbines drivetrain by means of digital twin
[J]. Mechanical Systems and Signal Processing , 2022 , 162 : 108087 .
[21]
MATANIA O REINICKE C GAHR C A digital twin for crack propagation in gears
[J]. Mechanics & Industry , 2023 , 24 (5 ): 499 -507 .
[22]
SONG R W ZHANG Y SHI H Prediction method for the remaining useful life of gearbox based on copula function
[J]. Systems Engineering: Theory & Practice , 2020 , 40 (9 ): 2466 -2474 .
DOI:10.12011/1000-6788-2019-0307-09
[23]
GUO F Y LIU J H ZOU F et al Research on the state-of-art, connotation and key implementation technology of assembly process planning with digital twin
[J]. Journal of Mechanical Engineering , 2019 , 55 (17 ): 110 -132 .
DOI:10.3901/JME.2019.17.110
[24]
LI J B WANG S L YANG J J et al A digital twin-based state monitoring method of gear test bench
[J]. Applied Sciences , 2023 , 13 (5 ): 3291 .
[25]
ZHANG Q WU Z AN B S et al Digital twin-based technical research on comprehensive gear fault diagnosis and structural performance evaluation
[J]. Sensors , 2025 , 25 (9 ): 2775 .
[26]
HE H SONG Q LI J Digital twin-driven predictive maintenance method for gearboxes considering fatigue damage and uncertainty
[J]. Mechanical Systems and Signal Processing , 2023 , 200 : 110579 .
[27]
KHAZRI M Implementation of digital twins for gearboxes using a coupled torsional dynamic model and experimental validation
[J]. IEEE Transactions on Industrial Informatics , 2021 , 17 (10 ): 6852 -6863 .
[本文引用: 1]
[28]
[本文引用: 1]
SONG X G LAI X N HE X W et al Key technologies of shape-performance integrated digital twin for major equipment
[J]. Journal of Mechanical Engineering , 2022 , 58 (10 ): 298 -325 .
DOI:10.3901/JME.2022.10.298
[本文引用: 1]
[29]
KAPTEYN M G WILLCOX K E From physics-based models to physics-informed learning: a data-driven digital twin framework
[J]. Journal of Computational Physics , 2020 , 418 : 109622 .
[本文引用: 1]
[30]
XIAO B ZHONG J S BAO X Y et al Digital twin-driven prognostics and health management for industrial assets
[J]. Scientific Reports , 2024 , 14 : 13443 .
[本文引用: 1]
[31]
TAO F ZHANG H ZHANG C Y Advancements and challenges of digital twins in industry
[J]. Nature Computational Science , 2024 , 4 (3 ): 169 -177 .
[本文引用: 1]
[32]
KONG T X HU T L ZHOU T T et al Data construction method for the applications of workshop digital twin system
[J]. Journal of Manufacturing Systems , 2021 , 58 : 323 -328 .
[本文引用: 1]
[33]
[本文引用: 1]
YIN F DU W L DING H et al Semi-analytical calculation for loaded tooth contact analysis of aerospace spiral bevel gears
[J]. Journal of Central South University (Science and Technology) , 2025 , 56 (4 ): 1331 -1342 .
DOI:10.11817/j.issn.1672-7207.2025.04.007
[本文引用: 1]
[34]
王煜石 , 容凯彬 , 丁撼 , 等 弧齿锥齿轮TCA接触印痕与传动误差协同求解方法研究
[J]. 机械科学与技术 , 2024 , 43 (9 ): 1559 -1568 .
WANG Y S RONG K B DING H et al TCA collaborative solution considering both contact pattern and transmission error for spiral bevel gears
[J]. Mechanical Science and Technology for Aerospace Engineering , 2024 , 43 (9 ): 1559 -1568 .
[35]
[本文引用: 1]
SONG B Y TANG J Y RONG K B et al A machine-settings compensation method for reducing machining error of spiral bevel gear tooth flank
[J]. Journal of Xi’an Jiaotong University , 2022 , 56 (2 ): 101 -109 .
DOI:10.7652/xjtuxb202202011
[本文引用: 1]
[36]
QIN Y LIU H Y MAO Y F Faulty rolling bearing digital twin model and its application in fault diagnosis with imbalanced samples
[J]. Advanced Engineering Informatics , 2024 , 61 : 102513 .
[本文引用: 1]
[37]
QUINTANILHA I M ELIAS V R M SILVA F B DA et al A fault detector/classifier for closed-ring power generators using machine learning
[J]. Reliability Engineering & System Safety , 2021 , 212 : 107614 .
[38]
陈亮 , 顾宇轩 , 林可欣 , 等 基于飞参数据的结构关键部位载荷孪生技术研究
[J/OL]. 航空学报 , 1 -10 . (2024-12-25 ) [2026-01-10 ]. .
URL
CHEN L GU Y X LIN K X et al Research on load twin technology for critical structural parts based on flight parameter data
[J/OL]. Acta Aeronautica et Astronautica Sinica , 1 -10 . (2024-12-25 ) [2026-01-10 ]. .
URL
[39]
GRAJA K ZRIBI M BOUAZIZ A Machine learning-based vibration response reconstruction for planetary gear fault diagnosis
[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering , 2025 , 47 (3 ): 146 .
[40]
El HACHEMI H ZERHOUNI N COUDERT T Application of synchronous filtering techniques for gear vibration signal denoising in helicopter health monitoring
[J]. Measurement , 2018 , 118 : 86 -98 .
[本文引用: 1]
Gearbox condition monitoring and diagnosis of unlabeled vibration signals using a supervised learning classifier
1
2024
... 直升机主减速器作为整机动力传动系统的核心部件,其结构精度和齿轮啮合性能直接影响飞机飞行安全与系统可靠性.弧齿锥齿轮因承载能力强、传动平稳、结构紧凑等优点,被广泛应用于航空航天装备的传动系统,尤其在直升机中承担着关键转速和扭矩的传递任务.该类齿轮副具有显著的空间啮合特性,几何参数复杂,齿面干涉敏感,对载荷和位置的偏差及制造误差呈高度非线性响应,导致啮合刚度、传动误差及接触特性变化剧烈[1 ] .这些变化不仅影响着齿轮动力传递效率和齿面服役寿命,还可能诱发系统响应异常和结构疲劳累积,因此对齿轮系统的服役可靠性提出了建模与预测要求.实现弧齿锥齿轮副的高精度建模及关键性能参数的识别与估计,已成为提升直升机传动系统工程适应性与健康管理水平的关键基础. ...
Planetary bearing defect detection in a commercial helicopter main gearbox with vibration and acoustic emission
1
2018
... 为了提升直升机传动系统的可靠性及其预测能力,健康与使用监测系统已在多机型中得到部署.其通过加速度传感器采集振动数据,用于早期故障的检测与寿命管理[2 ] .近年来,学者们围绕信号分析与故障诊断方法开展了大量研究.如:王轩等[3 ] 通过扭振信号分析揭示了行星齿轮箱的典型故障模式,Elasha等[4 ] 提出了用于早期故障识别的新型状态指标,Zhou等[5 ] 借助包络分析完成了主减速器轴承缺陷检测,许华超等[6 ] 则通过代理模型与灵敏度分析实现了结构减振优化.这些研究在信号特征提取与建模诊断等方面取得了一定进展,但受限于传感器布设、信噪比及工况扰动,在强非线性、多耦合背景下所采用传统方法的适应性与鲁棒性存在不足,尤其在振动状态预测与多变量耦合建模等方面面临瓶颈. ...
面向故障诊断的行星齿轮扭振信号测量与分析
1
2018
... 为了提升直升机传动系统的可靠性及其预测能力,健康与使用监测系统已在多机型中得到部署.其通过加速度传感器采集振动数据,用于早期故障的检测与寿命管理[2 ] .近年来,学者们围绕信号分析与故障诊断方法开展了大量研究.如:王轩等[3 ] 通过扭振信号分析揭示了行星齿轮箱的典型故障模式,Elasha等[4 ] 提出了用于早期故障识别的新型状态指标,Zhou等[5 ] 借助包络分析完成了主减速器轴承缺陷检测,许华超等[6 ] 则通过代理模型与灵敏度分析实现了结构减振优化.这些研究在信号特征提取与建模诊断等方面取得了一定进展,但受限于传感器布设、信噪比及工况扰动,在强非线性、多耦合背景下所采用传统方法的适应性与鲁棒性存在不足,尤其在振动状态预测与多变量耦合建模等方面面临瓶颈. ...
面向故障诊断的行星齿轮扭振信号测量与分析
1
2018
... 为了提升直升机传动系统的可靠性及其预测能力,健康与使用监测系统已在多机型中得到部署.其通过加速度传感器采集振动数据,用于早期故障的检测与寿命管理[2 ] .近年来,学者们围绕信号分析与故障诊断方法开展了大量研究.如:王轩等[3 ] 通过扭振信号分析揭示了行星齿轮箱的典型故障模式,Elasha等[4 ] 提出了用于早期故障识别的新型状态指标,Zhou等[5 ] 借助包络分析完成了主减速器轴承缺陷检测,许华超等[6 ] 则通过代理模型与灵敏度分析实现了结构减振优化.这些研究在信号特征提取与建模诊断等方面取得了一定进展,但受限于传感器布设、信噪比及工况扰动,在强非线性、多耦合背景下所采用传统方法的适应性与鲁棒性存在不足,尤其在振动状态预测与多变量耦合建模等方面面临瓶颈. ...
Diagnostics of a defective bearing within a planetary gearbox with vibration and acoustic emission
1
2015
... 为了提升直升机传动系统的可靠性及其预测能力,健康与使用监测系统已在多机型中得到部署.其通过加速度传感器采集振动数据,用于早期故障的检测与寿命管理[2 ] .近年来,学者们围绕信号分析与故障诊断方法开展了大量研究.如:王轩等[3 ] 通过扭振信号分析揭示了行星齿轮箱的典型故障模式,Elasha等[4 ] 提出了用于早期故障识别的新型状态指标,Zhou等[5 ] 借助包络分析完成了主减速器轴承缺陷检测,许华超等[6 ] 则通过代理模型与灵敏度分析实现了结构减振优化.这些研究在信号特征提取与建模诊断等方面取得了一定进展,但受限于传感器布设、信噪比及工况扰动,在强非线性、多耦合背景下所采用传统方法的适应性与鲁棒性存在不足,尤其在振动状态预测与多变量耦合建模等方面面临瓶颈. ...
A study on helicopter main gearbox planetary bearing fault diagnosis
1
2019
... 为了提升直升机传动系统的可靠性及其预测能力,健康与使用监测系统已在多机型中得到部署.其通过加速度传感器采集振动数据,用于早期故障的检测与寿命管理[2 ] .近年来,学者们围绕信号分析与故障诊断方法开展了大量研究.如:王轩等[3 ] 通过扭振信号分析揭示了行星齿轮箱的典型故障模式,Elasha等[4 ] 提出了用于早期故障识别的新型状态指标,Zhou等[5 ] 借助包络分析完成了主减速器轴承缺陷检测,许华超等[6 ] 则通过代理模型与灵敏度分析实现了结构减振优化.这些研究在信号特征提取与建模诊断等方面取得了一定进展,但受限于传感器布设、信噪比及工况扰动,在强非线性、多耦合背景下所采用传统方法的适应性与鲁棒性存在不足,尤其在振动状态预测与多变量耦合建模等方面面临瓶颈. ...
基于代理模型和敏感度分析的直升机主减速器减振优化
1
2024
... 为了提升直升机传动系统的可靠性及其预测能力,健康与使用监测系统已在多机型中得到部署.其通过加速度传感器采集振动数据,用于早期故障的检测与寿命管理[2 ] .近年来,学者们围绕信号分析与故障诊断方法开展了大量研究.如:王轩等[3 ] 通过扭振信号分析揭示了行星齿轮箱的典型故障模式,Elasha等[4 ] 提出了用于早期故障识别的新型状态指标,Zhou等[5 ] 借助包络分析完成了主减速器轴承缺陷检测,许华超等[6 ] 则通过代理模型与灵敏度分析实现了结构减振优化.这些研究在信号特征提取与建模诊断等方面取得了一定进展,但受限于传感器布设、信噪比及工况扰动,在强非线性、多耦合背景下所采用传统方法的适应性与鲁棒性存在不足,尤其在振动状态预测与多变量耦合建模等方面面临瓶颈. ...
基于代理模型和敏感度分析的直升机主减速器减振优化
1
2024
... 为了提升直升机传动系统的可靠性及其预测能力,健康与使用监测系统已在多机型中得到部署.其通过加速度传感器采集振动数据,用于早期故障的检测与寿命管理[2 ] .近年来,学者们围绕信号分析与故障诊断方法开展了大量研究.如:王轩等[3 ] 通过扭振信号分析揭示了行星齿轮箱的典型故障模式,Elasha等[4 ] 提出了用于早期故障识别的新型状态指标,Zhou等[5 ] 借助包络分析完成了主减速器轴承缺陷检测,许华超等[6 ] 则通过代理模型与灵敏度分析实现了结构减振优化.这些研究在信号特征提取与建模诊断等方面取得了一定进展,但受限于传感器布设、信噪比及工况扰动,在强非线性、多耦合背景下所采用传统方法的适应性与鲁棒性存在不足,尤其在振动状态预测与多变量耦合建模等方面面临瓶颈. ...
A review of digital twinning for rotating machinery
1
2024
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
Overview of predictive maintenance based on digital twin technology
0
2023
Digital twin: a state-of-the-art review of its enabling technologies, applications and challenges
1
2021
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
Digital twin-driven smart manufacturing: connotation, reference model, applications and research issues
1
2020
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
A review of digital twin technology for electromechanical products: evolution focus throughout key lifecycle phases
0
2023
Digital twin for rotating machinery fault diagnosis in smart manufacturing
0
2019
基于数字孪生的掘锚一体机实时状态映射
1
2022
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
基于数字孪生的掘锚一体机实时状态映射
1
2022
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
Fault diagnosis for reducers based on a digital twin
1
2024
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
Digital twin of a gear root crack prognosis
0
2023
Real-time prediction of probabilistic crack growth with a helicopter component digital twin
0
2021
A novel digital twin approach based on deep multimodal information fusion for aero-engine fault diagnosis
0
2023
Online condition monitoring of floating wind turbines drivetrain by means of digital twin
0
2022
A digital twin for crack propagation in gears
0
2023
基于Copula函数的齿轮箱剩余寿命预测方法
0
2020
基于Copula函数的齿轮箱剩余寿命预测方法
0
2020
数字孪生驱动的装配工艺设计现状及关键实现技术研究
0
2019
数字孪生驱动的装配工艺设计现状及关键实现技术研究
0
2019
A digital twin-based state monitoring method of gear test bench
0
2023
Digital twin-based technical research on comprehensive gear fault diagnosis and structural performance evaluation
0
2025
Digital twin-driven predictive maintenance method for gearboxes considering fatigue damage and uncertainty
0
2023
Implementation of digital twins for gearboxes using a coupled torsional dynamic model and experimental validation
1
2021
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
重大装备形性一体化数字孪生关键技术
1
2022
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
重大装备形性一体化数字孪生关键技术
1
2022
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
From physics-based models to physics-informed learning: a data-driven digital twin framework
1
2020
... 数字孪生作为融合机理建模与数据驱动分析的新型方法,为复杂传动系统的状态感知、故障预测与性能演化分析提供了新的实现路径[7 -9 ] .近年来,数字孪生研究已由概念框架与体系方法的探索,逐步拓展到面向机电装备、旋转机械及传动系统的工程应用,在架构构建、生命周期建模、状态映射与智能演化等方面形成了较为系统的研究基础[10 -15 ] .针对齿轮箱、减速器及风电传动系统等,相关研究已将数字孪生技术应用于故障诊断、运行监测、裂纹扩展分析、疲劳损伤建模及剩余寿命预测,表明其能够在复杂工况下实现对关键部件运行状态与退化过程的有效表征[16 -27 ] .同时,随着复杂结构建模、有限元分析、扭转动力学和可解释机器学习方法的发展,数字孪生已由静态的数字化模型逐步转向融合结构形貌、物理机理与监测数据的协同建模模式[28 -29 ] .总体来看,现有研究已验证了数字孪生技术在齿轮及传动系统状态监测、故障预测和性能评估中的应用潜力,但对于直升机主减速器弧齿锥齿轮这类多级耦合、高速重载对象,仍存在关键啮合激励难以在线获取、机理模型与实测振动响应之间缺乏有效闭环映射以及复杂工况下预测模型泛化能力不足等问题.因而,有必要面向弧齿锥齿轮系统构建融合齿面接触分析、动力学响应机理分析与数据驱动预测的数字孪生模型,为直升机主减速器振动监测与性能评估提供支撑. ...
Digital twin-driven prognostics and health management for industrial assets
1
2024
... 针对直升机主减速器这类多级啮合系统,构建高保真虚实映射模型与实现多源数据融合预测仍是核心难题[30 ] .相关研究指出[31 -32 ] :提升工业级数字孪生的关键在于深度融合设备机理与运行数据,形成具备物理可解释性与数据适应性的统一模型体系;构建基于机理-数据的维护性建模策略,以兼顾模型预测精度与结构透明度. ...
Advancements and challenges of digital twins in industry
1
2024
... 针对直升机主减速器这类多级啮合系统,构建高保真虚实映射模型与实现多源数据融合预测仍是核心难题[30 ] .相关研究指出[31 -32 ] :提升工业级数字孪生的关键在于深度融合设备机理与运行数据,形成具备物理可解释性与数据适应性的统一模型体系;构建基于机理-数据的维护性建模策略,以兼顾模型预测精度与结构透明度. ...
Data construction method for the applications of workshop digital twin system
1
2021
... 针对直升机主减速器这类多级啮合系统,构建高保真虚实映射模型与实现多源数据融合预测仍是核心难题[30 ] .相关研究指出[31 -32 ] :提升工业级数字孪生的关键在于深度融合设备机理与运行数据,形成具备物理可解释性与数据适应性的统一模型体系;构建基于机理-数据的维护性建模策略,以兼顾模型预测精度与结构透明度. ...
航空锥齿轮加载齿面接触分析的半解析计算方法
1
2025
... 为了实现对直升机主减速器核心部件——弧齿锥齿轮系统的高精度建模,需引入加载齿面接触分析及动力学联合建模方法[33 -35 ] ,而数据驱动方法为非线性状态建模提供了一种新的建模手段[36 -40 ] .针对直升机主减速器弧齿锥齿轮系统存在的关键激励不可测、机理模型与实测信号难以形成闭环映射、复杂工况适应性不足等问题,本文提出了物理路径与数据路径并行的弧齿锥齿轮系统振动预测数字孪生框架.首先,基于齿面测量点云构建齿面误差场,并在典型载荷下开展齿面接触分析,得到随啮合相位变化的时变啮合刚度与综合传动误差;其次,将时变啮合刚度与综合传动误差作为时变激励输入扭转动力学模型,计算得到具有明确机理含义的振动响应特征;最后,引入贝叶斯优化的XGBoost(eXtreme Gradient Boosting,极限梯度提升)模型BO-XGBoost,建立机理特征与振动响应之间的映射关系,实现从可测振动信号到不可测关键激励影响的间接表征.本文的贡献主要体现在以下三方面:一是贯通了齿面接触分析与动力学仿真求解,形成了可获取关键激励的输出链路;二是提出了基于实测振动加速度的机理特征映射方法,提升了模型可解释性与鲁棒性;三是在台架数据验证下给出了可复现的建模流程,为直升机主减速器振动监测与性能评估提供了支撑. ...
航空锥齿轮加载齿面接触分析的半解析计算方法
1
2025
... 为了实现对直升机主减速器核心部件——弧齿锥齿轮系统的高精度建模,需引入加载齿面接触分析及动力学联合建模方法[33 -35 ] ,而数据驱动方法为非线性状态建模提供了一种新的建模手段[36 -40 ] .针对直升机主减速器弧齿锥齿轮系统存在的关键激励不可测、机理模型与实测信号难以形成闭环映射、复杂工况适应性不足等问题,本文提出了物理路径与数据路径并行的弧齿锥齿轮系统振动预测数字孪生框架.首先,基于齿面测量点云构建齿面误差场,并在典型载荷下开展齿面接触分析,得到随啮合相位变化的时变啮合刚度与综合传动误差;其次,将时变啮合刚度与综合传动误差作为时变激励输入扭转动力学模型,计算得到具有明确机理含义的振动响应特征;最后,引入贝叶斯优化的XGBoost(eXtreme Gradient Boosting,极限梯度提升)模型BO-XGBoost,建立机理特征与振动响应之间的映射关系,实现从可测振动信号到不可测关键激励影响的间接表征.本文的贡献主要体现在以下三方面:一是贯通了齿面接触分析与动力学仿真求解,形成了可获取关键激励的输出链路;二是提出了基于实测振动加速度的机理特征映射方法,提升了模型可解释性与鲁棒性;三是在台架数据验证下给出了可复现的建模流程,为直升机主减速器振动监测与性能评估提供了支撑. ...
弧齿锥齿轮TCA接触印痕与传动误差协同求解方法研究
0
2024
弧齿锥齿轮TCA接触印痕与传动误差协同求解方法研究
0
2024
减小螺旋锥齿轮齿面加工误差的参数修正方法
1
2022
... 为了实现对直升机主减速器核心部件——弧齿锥齿轮系统的高精度建模,需引入加载齿面接触分析及动力学联合建模方法[33 -35 ] ,而数据驱动方法为非线性状态建模提供了一种新的建模手段[36 -40 ] .针对直升机主减速器弧齿锥齿轮系统存在的关键激励不可测、机理模型与实测信号难以形成闭环映射、复杂工况适应性不足等问题,本文提出了物理路径与数据路径并行的弧齿锥齿轮系统振动预测数字孪生框架.首先,基于齿面测量点云构建齿面误差场,并在典型载荷下开展齿面接触分析,得到随啮合相位变化的时变啮合刚度与综合传动误差;其次,将时变啮合刚度与综合传动误差作为时变激励输入扭转动力学模型,计算得到具有明确机理含义的振动响应特征;最后,引入贝叶斯优化的XGBoost(eXtreme Gradient Boosting,极限梯度提升)模型BO-XGBoost,建立机理特征与振动响应之间的映射关系,实现从可测振动信号到不可测关键激励影响的间接表征.本文的贡献主要体现在以下三方面:一是贯通了齿面接触分析与动力学仿真求解,形成了可获取关键激励的输出链路;二是提出了基于实测振动加速度的机理特征映射方法,提升了模型可解释性与鲁棒性;三是在台架数据验证下给出了可复现的建模流程,为直升机主减速器振动监测与性能评估提供了支撑. ...
减小螺旋锥齿轮齿面加工误差的参数修正方法
1
2022
... 为了实现对直升机主减速器核心部件——弧齿锥齿轮系统的高精度建模,需引入加载齿面接触分析及动力学联合建模方法[33 -35 ] ,而数据驱动方法为非线性状态建模提供了一种新的建模手段[36 -40 ] .针对直升机主减速器弧齿锥齿轮系统存在的关键激励不可测、机理模型与实测信号难以形成闭环映射、复杂工况适应性不足等问题,本文提出了物理路径与数据路径并行的弧齿锥齿轮系统振动预测数字孪生框架.首先,基于齿面测量点云构建齿面误差场,并在典型载荷下开展齿面接触分析,得到随啮合相位变化的时变啮合刚度与综合传动误差;其次,将时变啮合刚度与综合传动误差作为时变激励输入扭转动力学模型,计算得到具有明确机理含义的振动响应特征;最后,引入贝叶斯优化的XGBoost(eXtreme Gradient Boosting,极限梯度提升)模型BO-XGBoost,建立机理特征与振动响应之间的映射关系,实现从可测振动信号到不可测关键激励影响的间接表征.本文的贡献主要体现在以下三方面:一是贯通了齿面接触分析与动力学仿真求解,形成了可获取关键激励的输出链路;二是提出了基于实测振动加速度的机理特征映射方法,提升了模型可解释性与鲁棒性;三是在台架数据验证下给出了可复现的建模流程,为直升机主减速器振动监测与性能评估提供了支撑. ...
Faulty rolling bearing digital twin model and its application in fault diagnosis with imbalanced samples
1
2024
... 为了实现对直升机主减速器核心部件——弧齿锥齿轮系统的高精度建模,需引入加载齿面接触分析及动力学联合建模方法[33 -35 ] ,而数据驱动方法为非线性状态建模提供了一种新的建模手段[36 -40 ] .针对直升机主减速器弧齿锥齿轮系统存在的关键激励不可测、机理模型与实测信号难以形成闭环映射、复杂工况适应性不足等问题,本文提出了物理路径与数据路径并行的弧齿锥齿轮系统振动预测数字孪生框架.首先,基于齿面测量点云构建齿面误差场,并在典型载荷下开展齿面接触分析,得到随啮合相位变化的时变啮合刚度与综合传动误差;其次,将时变啮合刚度与综合传动误差作为时变激励输入扭转动力学模型,计算得到具有明确机理含义的振动响应特征;最后,引入贝叶斯优化的XGBoost(eXtreme Gradient Boosting,极限梯度提升)模型BO-XGBoost,建立机理特征与振动响应之间的映射关系,实现从可测振动信号到不可测关键激励影响的间接表征.本文的贡献主要体现在以下三方面:一是贯通了齿面接触分析与动力学仿真求解,形成了可获取关键激励的输出链路;二是提出了基于实测振动加速度的机理特征映射方法,提升了模型可解释性与鲁棒性;三是在台架数据验证下给出了可复现的建模流程,为直升机主减速器振动监测与性能评估提供了支撑. ...
A fault detector/classifier for closed-ring power generators using machine learning
0
2021
基于飞参数据的结构关键部位载荷孪生技术研究
0
1
基于飞参数据的结构关键部位载荷孪生技术研究
0
1
Machine learning-based vibration response reconstruction for planetary gear fault diagnosis
0
2025
Application of synchronous filtering techniques for gear vibration signal denoising in helicopter health monitoring
1
2018
... 为了实现对直升机主减速器核心部件——弧齿锥齿轮系统的高精度建模,需引入加载齿面接触分析及动力学联合建模方法[33 -35 ] ,而数据驱动方法为非线性状态建模提供了一种新的建模手段[36 -40 ] .针对直升机主减速器弧齿锥齿轮系统存在的关键激励不可测、机理模型与实测信号难以形成闭环映射、复杂工况适应性不足等问题,本文提出了物理路径与数据路径并行的弧齿锥齿轮系统振动预测数字孪生框架.首先,基于齿面测量点云构建齿面误差场,并在典型载荷下开展齿面接触分析,得到随啮合相位变化的时变啮合刚度与综合传动误差;其次,将时变啮合刚度与综合传动误差作为时变激励输入扭转动力学模型,计算得到具有明确机理含义的振动响应特征;最后,引入贝叶斯优化的XGBoost(eXtreme Gradient Boosting,极限梯度提升)模型BO-XGBoost,建立机理特征与振动响应之间的映射关系,实现从可测振动信号到不可测关键激励影响的间接表征.本文的贡献主要体现在以下三方面:一是贯通了齿面接触分析与动力学仿真求解,形成了可获取关键激励的输出链路;二是提出了基于实测振动加速度的机理特征映射方法,提升了模型可解释性与鲁棒性;三是在台架数据验证下给出了可复现的建模流程,为直升机主减速器振动监测与性能评估提供了支撑. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}