在钻爆法隧道施工中,开挖钻孔是首要且关键的工序。随着我国铁路、公路、水利等重大工程的持续推进,钻爆法隧道施工已基本实现全面机械化,目前绝大多数项目采用凿岩台车进行开挖作业。凿岩机作为凿岩台车的核心破岩部件,其钻孔作业的顺利程度直接决定了开挖效率。由于隧道地质条件复杂、岩体产状多变,凿岩台车通常配备液控或电控凿岩模块,以应对岩体变化带来的卡钻(多发于破碎岩体中)与空打(多发于裂隙发育岩体中)故障,提升钻进效率。然而,现有模块普遍采用基于阈值的控制策略,基本为事后响应,给予控制系统的调节窗口极小,仅能规避部分卡钻与空打故障,因此需人工干预排障,以致钻进效率低下、钻具磨损严重。因此,亟须研发具有超前感知能力的卡钻与空打智能分类与预测方法。
在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法。如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型。然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力。也有学者采用聚类方法进行研究。如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆。在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警。长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈。
同时,由于地质条件复杂及施工参数的强耦合性,传统基于阈值判据或浅层机器学习的分类方法面对凿岩机多源传感数据非线性动态演化时,往往存在特征解耦困难、时序关联割裂等问题[13 ] 。尤其当钻杆扭矩、推进压力、旋度等多维参数产生非平稳漂移时,故障表征信息呈现跨传感器、跨时间尺度的隐性传播特征[14 ] ,这对现有方法的特征融合能力与长时序依赖建模提出了严峻挑战。
针对上述问题,本文研究了一种多特征时序标记Transformer网络架构,并引入多头自注意力机制和残差连接机制,提出了适用于施工环境复杂、数据特征多样的凿岩机卡钻与空打分类与预测方法。主要研究内容如下:
1)提出了一种多特征时序标记策略,并基于此设计了专用的Transformer网络。针对具有多特征、非线性及动态变化特点的分级卡钻与空打数据,构建了全新的多特征时序标记策略,突破了传统Transformer网络在处理自然语言或二维图像数据中的局限,使其能够更有效地处理复杂故障数据。通过引入多特征时序标记,所设计的Transformer网络能充分发挥其固有的多头自注意力机制与残差结构优势,有效学习故障发展过程中跨越长时间步的关联特征[15 ] 。
2)融合多隧道数据,增强了模型的泛化能力。通过融合多隧道数据,并采用学习率热身运动、权重衰减等技术手段,显著增强了模型的泛化能力。这意味着模型在面对不同来源、不同条件下的卡钻与空打数据时,能够保持稳定的性能和预测准确性。
3)设计的模型具有高预测准确率和预警性能。相较于基于时间序列建模的异常检测方法,本文提出的方法具有更高的预测准确率。经测试表明,模型的预测准确率高达93.233%,能够预测卡钻与空打故障并提前预警,这对提升作业效率、保障作业安全等具有重要作用。
1 基于多特征时序标记Transformer 的故障分类与预测方法
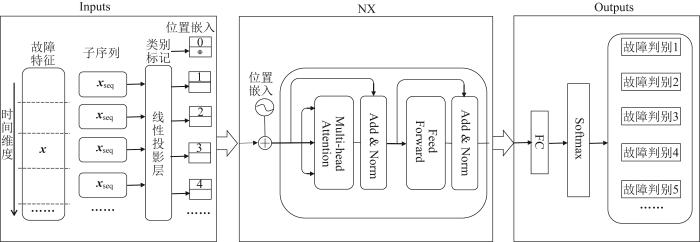
本文提出的凿岩机卡钻与空打故障分类与预测框架如图1 所示。其包含以下3个主要功能模块:1)多特征时序标记模块;2)Transformer特征提取模块;3)故障分类模块。首先,多特征时序标记模块执行原始输入的结构化转换,通过结构化标记策略保留数据的多维度特性、非线性关联和动态演化规律[16 ] ,并将其转化为嵌入向量序列;其次,Transformer特征提取模块运用自注意力机制对标记序列建立长程时序关联特征;最后,故障分类模块依据提取的特征模式识别故障类别。整个系统采用端到端的训练范式,通过优化交叉熵损失函数迭代更新网络参数,建立从原始传感数据到故障类别诊断的完整链路。下文将详述各模块的技术实现细节。
图1
图1
基于多特征时序标记Transformer 的故障分类与预测框架
Fig.1
Framework for fault classification and prediction based on multi-feature time-series labeling Transformer
1.1 多特征时序嵌入与编码方法
多特征时序批次数据可表示为x ∈ R B × P × L B 为模型超参数批次大小,P 为特征数,L 为时间切片长度。首先将原始数据 x x seq :
x s e q = x 1 x 1 ⋯ x N ∈ R B × P × N × L / N (1)
式中:N 为子序列个数,每个子序列的时间长度缩短为L/N 。
通过线性投影层将子序列映射到高维嵌入空间,完成维度变换。
x s e q W ∈ R B × P × N × D (2)
式中: W W ∈ R L / N × D D 为嵌入维度。
引入可学习的类别标记x 0 ∈ R p × L × D C seq :
C s e q = [ x 0 ; x s e q W ] ∈ R B × P × N + 1 × D (3)
该操作将标记维度扩展为N + 1 x 0 为特征聚合的锚点。
为了对时间顺序信息进行编码,添加批次重复的位置嵌入P s e q ∈ R B × P × N + 1 × D
k s e q = C s e q + P s e q ∈ R B × P × N + 1 × D (4)
最终生成的 k seq 标记嵌入序列同时包含了时序特征与位置编码,其作为Transformer编码器的输入。
1.2 多头注意力机制
多头注意力机制通过并行运作多个独立注意力头,学习并建立输入序列中任意标记对之间的关联强度。这使得序列中的任一标记都能自适应地融合对其最具信息量的其他标记的特征[17 ] ,从而显著提升长时序依赖建模能力。其核心组件是缩放点积注意力模块,可通过式(5)计算其注意力权重:
A t t e n t i o n Q , K , V = s o f t m a x Q ⋅ K T D k ⋅ V (5)
式中: Q K V Q , K , V ∈ R N + 1 × D ζ D ζ D k K
Q K V k s e q ∈ R ( N + 1 ) × D
Q = k s e q W Q , W Q ∈ R D × D ζ K = k s e q W K , W K ∈ R D × D ζ V = k s e q W V , W V ∈ R D × D ζ (6)
式中: WQ WK WV
多头注意力机制扩展了单头注意力的表达能力,通过在多个表示子空间并行执行注意力操作,最终融合多视角特征。其包含2个关键步骤:一个是多注意力头并行计算,即每个注意力头Hi
H i = A t t e n t i o n Q W i Q , K W i K , V W i V (7)
式中:W i Q , W i K , W i V ∈ R D ζ × D v i 头的参数,其中D v 为单头特征维度。
另一个关键步骤是多头特征融合,即拼接所有注意力头输出并通过线性变换整合:
M H A Q , K , V = C o n c a t H 1 , ⋯ , H h ⋅ W O (8)
式中:W O ∈ R h D v × D h 为注意力头数。
该机制通过在多子空间联合建模,显著增强了序列特征的表达能力。
1.3 前向网络
前向网络通过2个线性变换层和非线性激活函数将多头注意力提取的特征映射为更抽象的表示。其数学表达式为:
F F N x f f n = D r o p o u t W 2 ⋅ G E L U W 1 x f f n + b 1 + b 2 (9)
式中:x f f n ∈ R D m o d e l D model 为其维度;GELU为高斯误差线性单元激活函数,用于引入非线性变换;W 1 ∈ R D m o d e l × D h i d d e n D model 映射到隐藏层维度D hidden ;b 1 ∈ R D h i d d e n W 2 ∈ R D m o d e l × D h i d d e n D model ;b 2 ∈ R D h i d d e n
G E L U x f f n = x f f n ⋅ 1 2 1 + e r f x f f n 2 (10)
式中:e r f ⋅
相较于ReLU,GELU的平滑特性和负值梯度特性有效改善了其收敛能力。
1.4 残差连接与层归一化
在Transformer层中,残差连接与层归一化作用于多头注意力输出和前向网络输出。
M H A _ o u t = L a y e r N o r m x i n + M H A x i n (11)
F F N _ o u t = L a y e r N o r m M H A _ o u t + F F N M H A _ o u t (12)
式(11)和式(12)中: x in 为输入特征向量;MHA ( x in )为多头注意力机制的输出,通过并行多个注意力头提取特征;L a y e r N o r m ⋅
残差连接x i n + M H A x i n M H A _ o u t + F F N M H A _ o u t [18 ] ,增强深层网络训练的稳定性。
1.5 故障分类
基于凿岩机卡钻与空打故障的特点,提出了一种基于前馈神经网络的轻量化故障分类架构。传统Transformer解码器的序列重构机制与分类目标存在差异,而前向网络凭借其逐层映射特征的特性,能更高效地将时序特征转换为类别空间。该分类器由线性变换层和归一化层构成。设经过Transformer编码器提取的深层时序特征为y f ∈ R D W c ∈ R D × n c n c b c ∈ R n c
P y c = S o f t m a x W c y f + b c (13)
式中:S o f t m a x ⋅ ∑ c = 1 n c P y c = 1
y ⌢ = a r g m a x c P y c (14)
式中:a r g m a x c y ⌢
2 凿岩机故障分类与预测流程
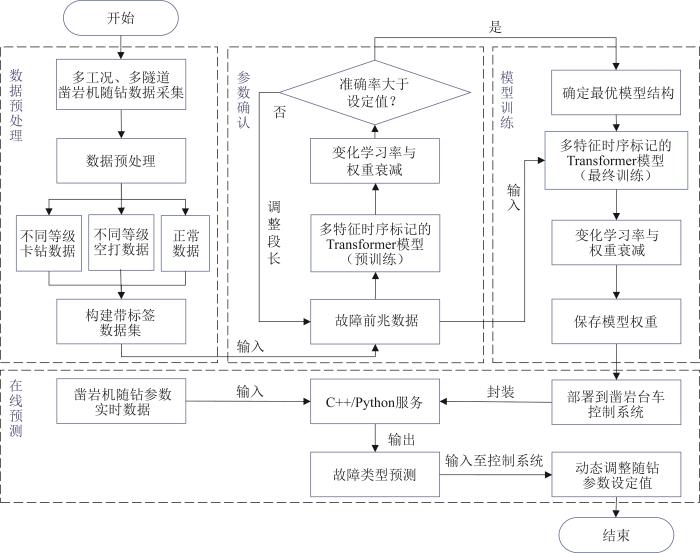
本文提出的基于多特征时序标记Transformer的凿岩机故障分类与预测流程如图2 所示。
图2
图2
基于多特征时序标记Transformer 的凿岩机故障分类与预测流程
Fig.2
Process of fault classification and prediction of rock drill based on multi-feature time-series labeling Transformer
在数据预处理阶段,采集多工况、多隧道凿岩机随钻数据,采集频率为40 ms。随钻数据涵盖钻孔深度信息及钻机工作状态实时监测参数,关键随钻参数有冲击压力、推进压力、回转压力、推进速度和水流量[19 ] 等,如表1 所示。随后,对随钻数据进行缺失值补充、噪声过滤等处理。依据回转压力、推进速度等参数在故障状态下的阈值,为每条数据打上相应的标签。为增强模型的工程应用性,将标签设计为正常状态、一级卡钻、二级卡钻、一级空打和二级空打等5类,使控制系统能按照标签等级设计响应的调整策略,实现提前规避故障及使钻进效率最大化的目标。
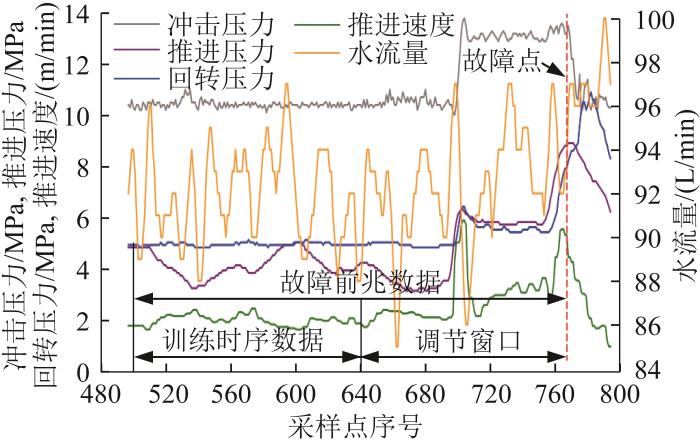
在模型训练阶段,定义故障发生前一段时间内的随钻数据为故障前兆数据。为实现预测,需确定故障前兆数据中用于训练的时序数据段段长和控制系统的调节窗口长度。观察故障前兆数据的特征,故障前兆数据的划分如图3 所示。然后,将符合段长要求的训练数据输入时序标记的分类模型中,通过带预热策略的余弦退火学习率调度器与L2正则化权重衰减机制[20 ] ,驱动Transformer网络对时序演变规律进行深度挖掘,并基于分类准确率阈值及测试集的分类准确率反复迭代优化段长,直至确定。最后,采用早停策略锁定最优模型参数后保存权重。
图3
图3
故障前兆数据划分
Fig.3
Division of fault precursor data
在在线预测阶段,将网络权重部署至凿岩台车控制系统,实时数据流经同步特征提取与标准化处理后输入训练好的模型,然后输出故障概率及评估结果;控制系统基于故障概率、故障提前预警时长以及动态调节策略,调整冲击压力、推进压力、回转压力、推进速度和水流量等钻进参数的设定值,以实时规避卡钻与空打风险。
3 案例分析
3.1 凿岩机实测数据集来源
本文采用凿岩机钻进高原铁路察达、昌都、吉托和孜拉山等隧道时的高频随钻实时数据,来验证所提出方法的有效性和优越性。将故障前兆数据中的训练时序数据段段长进行迭代优化,最终确定段长为2.9 s。为构建多特征时序标记Transformer的输入,利用滑动窗口机制从原始数据中提取符合段长要求的时序数据,最终获得的数据库规模为17 542个片段,其按照一定比例分布于各故障类型(即正常数据、一级卡钻、二级卡钻、一级空打和二级空打)。为评估模型性能,将总样本数按8∶2的比例随机拆分为训练集和测试集。
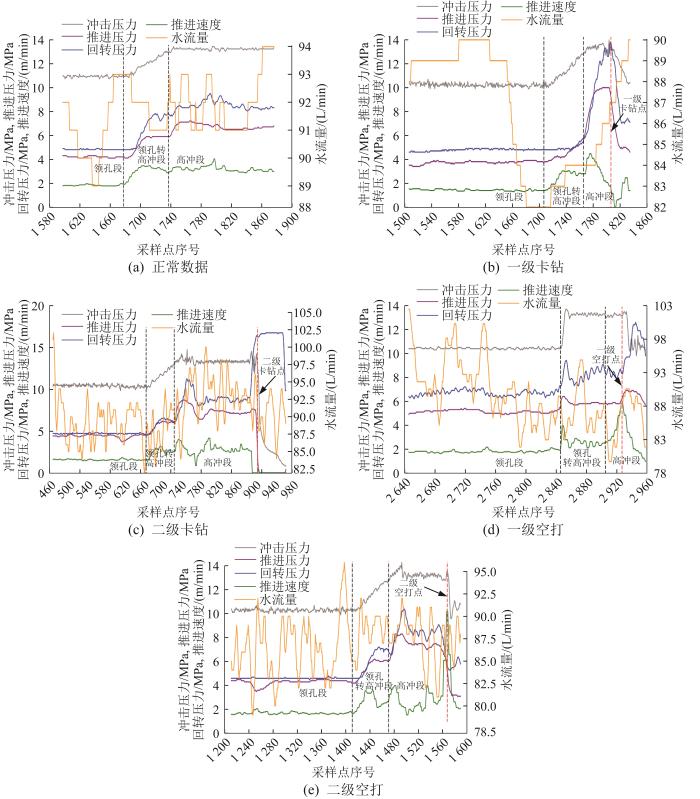
察达隧道的凿岩机随钻参数如图4 所示。图中2条黑色虚线将钻孔过程划分为3个阶段:第1条虚线的左侧为领孔段,2条虚线之间为领孔转高冲段,第2条虚线的右侧为高冲段。
图4
图4
察达隧道凿岩机随钻参数
Fig.4
While-drilling parameters of rock drill in Chada Tunnel
图4 (a)展示了凿岩机在正常钻孔过程中各关键参数的变化趋势。
图4 (b)展示了发生一级卡钻时参数的变化趋势。红色虚线标记了卡钻点(回转压力超过一级卡钻阈值13 MPa,但未达到二级卡钻阈值15 MPa)。由图可知,在卡钻发生前的高冲段,特征参数呈急剧变化趋势。
图4 (c)展示了发生二级卡钻时参数的变化趋势。由图可知,卡钻前参数出现明显波动,且回转压力超过了二级卡钻阈值15 MPa。
图4 (d)展示了发生一级空打时参数的变化趋势。推进速度超过一级空打阈值5 m/min,但未达到二级阈值6 m/min。空打发生前,特征参数同样表现出明显的上升或下降趋势。
图4 (e)展示了发生二级空打时参数的变化趋势。二级空打发生前,参数同样表现为剧烈变化的趋势,且推进速度已超过二级空打阈值6 m/min。
3.2 各模型架构设计
采用CNN、LSTM、CNN-LSTM、RNN、iTransformer基准模型与本文提出的多特征时序标记Transformer模型进行实验对比。各模型的架构设计如下。
C o n v 15 , 32 , 3 , 1 - B a t c h N o r m - R e L u - M a x P o o l 2 , 2 - C o n v 32 , 64 , 3 , 1 - B a t c h N o r m - R e L u - F l a t t e n - F C 128 , 128 - R e L u - D r o p o u t - F C 128 , 64 - R e L u - D r o p o u t - F C 64 , 5
其中,Conv (a , b , c , d )(含a 个尺寸为b 的卷积核,c 为填充,d 为步长)后接批量归一化(BatchNorm)、激活函数ReLU、最大池化层MaxPool (e , f )(e 为核尺寸,f 为步长)、展平层Flatten和正则化Dropout,最终连接全连接层FC (g , l )(g 为输入维度,l 为输出维度)。
LSTM由多个时序分析层(每层表示为LSTM (j ),含j 个隐单元)和单个全连接层构成,其详细配置如下:
L S T M ( 64 ) - L S T M ( 64 ) - F C ( 128 , 5 )
CNN-LSTM混合模型融合了多个前述卷积模块和多个LSTM层,其详细配置如下:
C o n v ( 15 , 32 , 3 , 1 ) - B a t c h N o r m - R e L u - M a x P o o l ( 2 , 2 ) - C o n v ( 32 , 64 , 3 , 1 ) - B a t c h N o r m - R e L u - M a x P o o l ( 2 , 2 ) - L S T M ( 64 ) - L S T M ( 64 ) - F C ( 128 , 5 )
RNN模型包括RNN堆叠层、Dropout率、全连接层和激活函数等,其详细配置如下:
R N N ( 15 , 64 , 2 ) - D r o p o u t ( 0.3 ) - F C ( 64 , 32 ) - R e L U - F C ( 32 , 5 )
iTransformer模型的多头注意力头数设置为4,前馈网络的隐藏层维度为128,Dropout率为0.2,批处理大小(batch_size)为32,输入特征数(num_features)为15,并采用Adam优化器进行训练。
本文提出的多特征时序标记Transformer模型的参数设置如表2 所示。
实验基于PyTorch 1.8.0框架实现,硬件采用NVIDIA GeForce RTX 5000显卡。为降低随机性的影响,所有实验独立重复进行多次,取多次测试结果的平均值为最终值。
为了全面评估算法性能,本文选用准确率A 和召回率R 为核心评价指标。其计算公式如下:
A = T P + T N T P + F P + T N + F N (15)
R = T P T P + F N (16)
式中:T P 为真阳性例数,即实际为某类故障且被正确预测为该类故障的样本数;T N 为真阴性例数,即实际为非该类故障且被正确预测为非该类故障的样本数;F P 为假阳性例数,即实际为非该类故障但被错误预测为该类故障的样本数;F N 为假阴性例数,即实际为某类故障但被错误预测为非该类故障的样本数。
3.3 结果与分析
各模型的性能指标对比如表3 所示。由表可知:CNN、LSTM、RNN单一模型的性能表现均不及 CNN-LSTM混合模型,说明CNN空间特征学习能力与LSTM时序动态建模能力的整合能有效提升模型的预测性能;iTransformer作为Transformer的变体,性能优良,凸显了Transformer架构在处理长程时序依赖方面超越传统CNN、LSTM和RNN模型的潜力;本文提出的基于多特征时序标记策略的方法具有最好的性能,说明了该策略应用于凿岩机卡钻与空打故障分类与预测的有效性。
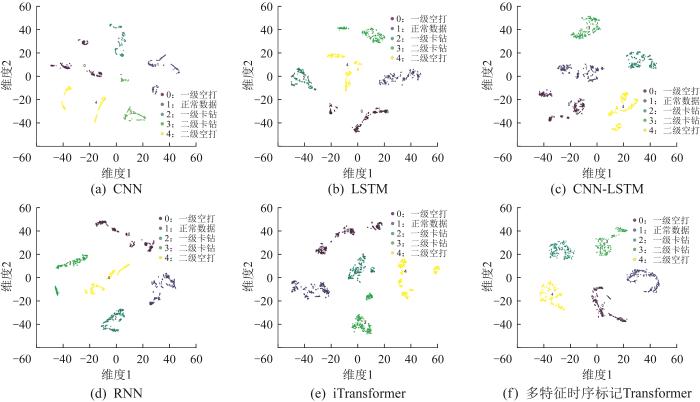
对模型泛化能力的评估离不开对特征分布的考察。采用t-SNE(t-distribution stochastic neighbour embedding,t分布随机近邻嵌入)[21 ] 对高维特征进行降维可视化,结果如图5 所示。由图可知,由本文提出的神经网络提取的特征空间中,同类样本点最密集(类内样本聚集性最强),不同类样本点的界限最清晰(不同类间的分离度最高)。这一结果直观验证了模型卓越的特征提取能力和泛化潜力。
图5
图5
不同模型下t-SNE 可视化结果
Fig.5
Result of t-SNE visualization from different models
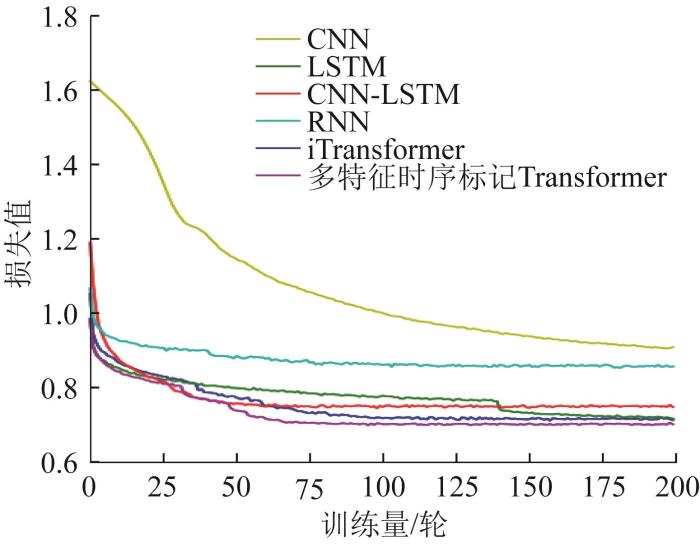
对各模型训练过程的收敛性进行分析。模型训练损失值如图6 所示。由图可知,所有模型损失值均随训练轮次而稳步下降并趋于稳定,说明训练是有效的。同时,本文提出的模型具有最快的收敛速率,进一步凸显了其在训练速度上的优势。
图6
图6
模型训练损失值
Fig.6
Model training loss values
为了评估模型在实际工程中的适用性,对比了各模型的参数量与推理时间,如表4 所示。由表可知,本文模型的参数量较少,同时保留了Transformer的结构优势,得益于并行化计算架构,其推理速度明显快于同等规模的复杂模型(如LSTM、CNN-LSTM和iTransformer),仅次于参数量最少的CNN模型,因此能完全满足现场实时应用要求。
4 结 论
本研究针对凿岩机卡钻与空打故障分类与预测需求,创新性地构建了一种基于多特征时序标记Transformer的深度学习网络模型。主要研究内容如下:
1)提出了多特征时序标记机制,针对凿岩机多源传感数据强耦合、非线性、时变性强的特性,有效解决了其建模难题。通过保留标准Transformer的核心优势并以前馈网络替代传统解码器,显著增强了模型对长时序依赖特征的提取能力。
2)提出了动态切片-预测双阶段策略。在训练阶段,基于分类准确率阈值迭代优化时序数据段段长和调节窗口长度,精准捕捉故障演化规律;在预测阶段,通过构建预测数据集,成功实现了钻孔周期级别的预警,有效弥补了固定时间窗口方法对长周期故障特征响应滞后的不足。
3)基于多隧道复杂工况数据的验证及多维度对比实验证明,所提出的方法在凿岩机卡钻与空打故障分类准确率、特征可分性与泛化性、收敛速度及工程适用性等方面均具有显著优势。
本文链接: https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.201
参考文献
View Option
[1]
陈晓 , 张奇志 , 王鑫 , 等 基于ISSA-SVM的钻井卡钻事故预测
[J]. 科学技术与工程 , 2024 , 24 (8 ): 3207 -3214 .
[本文引用: 1]
CHEN X ZHANG Q Z WANG X et al Prediction of drilling jam accidents based on ISSA-SVM
[J]. Science Technology and Engineering , 2024 , 24 (8 ): 3207 -3214 .
[本文引用: 1]
[2]
刘子豪 , 宋先知 , 朱硕 , 等 基于VC-SVM与粒子群算法的卡钻智能预测方法
[J]. 石油机械 , 2024 , 52 (10 ): 1 -11 .
[本文引用: 1]
LIU Z H SONG X Z ZHU S et al Intelligent prediction method of pipe sticking based on VC-SVM and particle swarm optimization
[J]. China Petroleum Machinery , 2024 , 52 (10 ): 1 -11 .
[本文引用: 1]
[3]
张涛 , 夏鹏 , 李军 , 等 基于井下参数的SCNGO-SVM卡钻预警方法研究
[J]. 石油机械 , 2025 , 53 (1 ): 20 -27 , 36 .
[本文引用: 1]
ZHANG T XIA P LI J et al Research on SCNGO-SVM sticking warning method based on downhole parameters
[J]. China Petroleum Machinery , 2025 , 53 (1 ): 20 -27 , 36 .
[本文引用: 1]
[4]
苏晓眉 , 张涛 , 李玉飞 , 等 基于K-Means聚类算法的沉砂卡钻预测方法研究
[J]. 钻采工艺 , 2021 , 44 (3 ): 5 -9 .
[本文引用: 1]
SU X M ZHANG T LI Y F et al Research on the sticking prediction method based on K-Means clustering algorithm
[J]. Drilling & Production Technology , 2021 , 44 (3 ): 5 -9 .
[本文引用: 1]
[5]
耿晓光 , 马飞 , 李叶林 , 等 液压凿岩机防空打装置的特性分析与优化设计
[J]. 制造业自动化 , 2014 , 36 (16 ): 150 -153 .
[本文引用: 1]
GENG X G MA F LI Y L et al Characteristic analysis and optimization design of anti-empty impact equipment for hydraulic rock drill
[J]. Manufacturing Automation , 2014 , 36 (16 ): 150 -153 .
[本文引用: 1]
[6]
田文元 , 姚鹏 , 朱春霞 , 等 液压凿岩机活塞防空打装置的设计研究
[J]. 工程机械 , 2007 , 38 (1 ): 48 -50 , 98 .
[本文引用: 1]
TIAN W Y YAO P ZHU C X et al Design and research on a device preventing piston from idle impact for hydraulic rock drill
[J]. Construction Machinery and Equipment , 2007 , 38 (1 ): 48 -50 , 98 .
[本文引用: 1]
[7]
LIU X J JIN Y W YAO S et al Hydraulic fault prediction of integrated transmission system based on LSTM
[J]. Journal of Physics: Conference Series , 2024 , 2724 (1 ): 012016 .
[本文引用: 1]
[8]
LU J Z TAN L J JIANG H Y Review on convolutional neural network (CNN) applied to plant leaf disease classification
[J]. Agriculture , 2021 , 11 (8 ): 707 .
[本文引用: 1]
[9]
ROSTAMIAN A O’HARA J G Event prediction within directional change framework using a CNN-LSTM model
[J]. Neural Computing and Applications , 2022 , 34 (20 ): 17193 -17205 .
[本文引用: 1]
[10]
FANG B L XU L LUO Y J et al A method for short-term electric load forecasting based on the FMLP-iTransformer model
[J]. Energy Reports , 2024 , 12 : 3405 -3411 .
[本文引用: 1]
[11]
LI K W YU X Y OU S F et al Fault location in distribution network based on RNN and transfer learning
[J]. International Journal of High Speed Electronics and Systems , 2025 , 34 (2 ): 2440043 .
[本文引用: 1]
[12]
SHEN H Y LIU Y F ZHAO Q Y et al Optimized GRU-based voltage fault prediction method for lithiumion battery packs in real-life
[J]. Quality and Reliability Engineering International , 2025 , 41 (3 ): 1108 -1122 .
[本文引用: 1]
[13]
LIN H LIU G N WU J J et al Deterring the gray market: product diversion detection via learning disentangled representations of multivariate time series
[J]. INFORMS Journal on Computing , 2023 , 36 (2 ): 571 -586 .
[本文引用: 1]
[14]
孙子健 , 汤健 , 乔俊飞 面向工业过程难测参数建模的双窗口概念漂移检测
[J]. 控制理论与应用 , 2021 , 38 (12 ): 1979 -1992 .
[本文引用: 1]
SUN Z J TANG J QIAO J F Double window concept drift detection method for modeling of difficult-to-measure parameter in industrial processes
[J]. Control Theory & Applications , 2021 , 38 (12 ): 1979 -1992 .
[本文引用: 1]
[15]
傅世元 , 高欣 , 张浩 , 等 基于元学习动态选择集成的电力调度数据异常检测方法
[J]. 电网技术 , 2022 , 46 (8 ): 3248 -3256 .
[本文引用: 1]
FU S Y GAO X ZHANG H et al Anomaly detection for power dispatching data based on meta-learning dynamic ensemble selection
[J]. Power System Technology , 2022 , 46 (8 ): 3248 -3256 .
[本文引用: 1]
[16]
刘庭亭 , 何志琴 基于IZOA结合最小交叉熵的图像分割算法
[J]. 电子测量技术 , 2025 , 48 (16 ): 40 -53 .
[本文引用: 1]
LIU T T HE Z Q Based on IZOA combined with minimum cross-entropy image segmentation algorithm
[J]. Electronic Measurement Technology , 2025 , 48 (16 ): 40 -53 .
[本文引用: 1]
[17]
王金金 基于改进Transformer和跨模态自监督学习的轴承故障诊断方法研究
[D]. 开封 : 河南大学 , 2024 .
[本文引用: 1]
WANG J J Research on bearing fault diagnosis method based on improved transformer and cross-modal self-supervised learning
[D]. Kaifeng : Henan University , 2024 .
[本文引用: 1]
[18]
卓仁杰 针对数据分布差异的图像处理方法研究及应用
[D]. 成都 : 电子科技大学 , 2025 .
[本文引用: 1]
ZHUO R J Research and application of image processing method aiming at data distribution difference
[D]. Chengdu : University of Electronic Science and Technology of China , 2025 .
[本文引用: 1]
[19]
杜义康 基于集成学习技术的隧道围岩智能分级方法研究
[J]. 四川建筑 , 2021 , 41 (4 ): 88 -91 , 94 .
[本文引用: 1]
DU Y K Research on intelligent classification method of tunnel surrounding rock based on integrated learning technology
[J]. Sichuan Architecture , 2021 , 41 (4 ): 88 -91 , 94 .
[本文引用: 1]
[20]
张朝晖 基于Transformer与元学习的小样本滚动轴承故障诊断研究
[D]. 秦皇岛 : 燕山大学 , 2024 .
[本文引用: 1]
ZHANG Z H Research on few-shot rolling bearing fault diagnosis based on transformer and meta-learning
[D]. Qinhuangdao : Yanshan University , 2024 .
[本文引用: 1]
[21]
LIU X QU X H XIE X J et al Predicting alloying element yield in converter steelmaking using t-SNE-WOA-LSTM
[J]. Processes , 2024 , 12 (5 ): 974 .
[本文引用: 1]
基于ISSA-SVM的钻井卡钻事故预测
1
2024
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
基于ISSA-SVM的钻井卡钻事故预测
1
2024
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
基于VC-SVM与粒子群算法的卡钻智能预测方法
1
2024
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
基于VC-SVM与粒子群算法的卡钻智能预测方法
1
2024
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
基于井下参数的SCNGO-SVM卡钻预警方法研究
1
2025
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
基于井下参数的SCNGO-SVM卡钻预警方法研究
1
2025
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
基于K-Means聚类算法的沉砂卡钻预测方法研究
1
2021
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
基于K-Means聚类算法的沉砂卡钻预测方法研究
1
2021
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
液压凿岩机防空打装置的特性分析与优化设计
1
2014
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
液压凿岩机防空打装置的特性分析与优化设计
1
2014
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
液压凿岩机活塞防空打装置的设计研究
1
2007
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
液压凿岩机活塞防空打装置的设计研究
1
2007
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
Hydraulic fault prediction of integrated transmission system based on LSTM
1
2024
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
Review on convolutional neural network (CNN) applied to plant leaf disease classification
1
2021
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
Event prediction within directional change framework using a CNN-LSTM model
1
2022
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
A method for short-term electric load forecasting based on the FMLP-iTransformer model
1
2024
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
Fault location in distribution network based on RNN and transfer learning
1
2025
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
Optimized GRU-based voltage fault prediction method for lithiumion battery packs in real-life
1
2025
... 在现有卡钻预测研究中,多采用优化支持向量机(support vector machines, SVM)及其融合智能算法.如:陈晓等[1 ] 提出了改进麻雀搜索算法,应用后故障分类准确率达85.185 2%;刘子豪等[2 ] 集成了投票分类器与粒子群优化SVM,采用固定时间窗口,预测了卡钻长周期演化特征;张涛等[3 ] 结合北方苍鹰算法与SVM,建立了卡钻预警模型.然而,此类方法常因主成分分析而丢失时序信息,或其窗口划分方式忽略了长周期演化特征,影响了模型的泛化能力.也有学者采用聚类方法进行研究.如:苏晓眉等[4 ] 用k-means聚类算法进行沉砂卡钻异常检测,但缺乏多传感器信息时序融合,难以捕捉故障动态前兆.在空打预测方面,耿晓光等[5 -6 ] 进行了分阶段建模或缓冲结构优化,属于事后保护或静态设计,无法实现动态预警.长短期记忆网络(long short-term memory, LSTM)[7 ] 、卷积神经网络(CNN, convolutional neural network)[8 ] 及CNN-LSTM[9 ] 等时序模型仍受顺序与局部依赖限制,而Transformer及iTransformer网络[10 ] 虽然通过自注意力机制实现了全局建模,优于循环神经网络(recurrent neural network, RNN)和门控循环单元[11 -12 ] ,但在卡钻与空打预测中仍面临标注稀疏、大数据依赖及实时预警难等瓶颈. ...
Deterring the gray market: product diversion detection via learning disentangled representations of multivariate time series
1
2023
... 同时,由于地质条件复杂及施工参数的强耦合性,传统基于阈值判据或浅层机器学习的分类方法面对凿岩机多源传感数据非线性动态演化时,往往存在特征解耦困难、时序关联割裂等问题[13 ] .尤其当钻杆扭矩、推进压力、旋度等多维参数产生非平稳漂移时,故障表征信息呈现跨传感器、跨时间尺度的隐性传播特征[14 ] ,这对现有方法的特征融合能力与长时序依赖建模提出了严峻挑战. ...
面向工业过程难测参数建模的双窗口概念漂移检测
1
2021
... 同时,由于地质条件复杂及施工参数的强耦合性,传统基于阈值判据或浅层机器学习的分类方法面对凿岩机多源传感数据非线性动态演化时,往往存在特征解耦困难、时序关联割裂等问题[13 ] .尤其当钻杆扭矩、推进压力、旋度等多维参数产生非平稳漂移时,故障表征信息呈现跨传感器、跨时间尺度的隐性传播特征[14 ] ,这对现有方法的特征融合能力与长时序依赖建模提出了严峻挑战. ...
面向工业过程难测参数建模的双窗口概念漂移检测
1
2021
... 同时,由于地质条件复杂及施工参数的强耦合性,传统基于阈值判据或浅层机器学习的分类方法面对凿岩机多源传感数据非线性动态演化时,往往存在特征解耦困难、时序关联割裂等问题[13 ] .尤其当钻杆扭矩、推进压力、旋度等多维参数产生非平稳漂移时,故障表征信息呈现跨传感器、跨时间尺度的隐性传播特征[14 ] ,这对现有方法的特征融合能力与长时序依赖建模提出了严峻挑战. ...
基于元学习动态选择集成的电力调度数据异常检测方法
1
2022
... 1)提出了一种多特征时序标记策略,并基于此设计了专用的Transformer网络.针对具有多特征、非线性及动态变化特点的分级卡钻与空打数据,构建了全新的多特征时序标记策略,突破了传统Transformer网络在处理自然语言或二维图像数据中的局限,使其能够更有效地处理复杂故障数据.通过引入多特征时序标记,所设计的Transformer网络能充分发挥其固有的多头自注意力机制与残差结构优势,有效学习故障发展过程中跨越长时间步的关联特征[15 ] . ...
基于元学习动态选择集成的电力调度数据异常检测方法
1
2022
... 1)提出了一种多特征时序标记策略,并基于此设计了专用的Transformer网络.针对具有多特征、非线性及动态变化特点的分级卡钻与空打数据,构建了全新的多特征时序标记策略,突破了传统Transformer网络在处理自然语言或二维图像数据中的局限,使其能够更有效地处理复杂故障数据.通过引入多特征时序标记,所设计的Transformer网络能充分发挥其固有的多头自注意力机制与残差结构优势,有效学习故障发展过程中跨越长时间步的关联特征[15 ] . ...
基于IZOA结合最小交叉熵的图像分割算法
1
2025
... 本文提出的凿岩机卡钻与空打故障分类与预测框架如图1 所示.其包含以下3个主要功能模块:1)多特征时序标记模块;2)Transformer特征提取模块;3)故障分类模块.首先,多特征时序标记模块执行原始输入的结构化转换,通过结构化标记策略保留数据的多维度特性、非线性关联和动态演化规律[16 ] ,并将其转化为嵌入向量序列;其次,Transformer特征提取模块运用自注意力机制对标记序列建立长程时序关联特征;最后,故障分类模块依据提取的特征模式识别故障类别.整个系统采用端到端的训练范式,通过优化交叉熵损失函数迭代更新网络参数,建立从原始传感数据到故障类别诊断的完整链路.下文将详述各模块的技术实现细节. ...
基于IZOA结合最小交叉熵的图像分割算法
1
2025
... 本文提出的凿岩机卡钻与空打故障分类与预测框架如图1 所示.其包含以下3个主要功能模块:1)多特征时序标记模块;2)Transformer特征提取模块;3)故障分类模块.首先,多特征时序标记模块执行原始输入的结构化转换,通过结构化标记策略保留数据的多维度特性、非线性关联和动态演化规律[16 ] ,并将其转化为嵌入向量序列;其次,Transformer特征提取模块运用自注意力机制对标记序列建立长程时序关联特征;最后,故障分类模块依据提取的特征模式识别故障类别.整个系统采用端到端的训练范式,通过优化交叉熵损失函数迭代更新网络参数,建立从原始传感数据到故障类别诊断的完整链路.下文将详述各模块的技术实现细节. ...
基于改进Transformer和跨模态自监督学习的轴承故障诊断方法研究
1
2024
... 多头注意力机制通过并行运作多个独立注意力头,学习并建立输入序列中任意标记对之间的关联强度.这使得序列中的任一标记都能自适应地融合对其最具信息量的其他标记的特征[17 ] ,从而显著提升长时序依赖建模能力.其核心组件是缩放点积注意力模块,可通过式(5) 计算其注意力权重: ...
基于改进Transformer和跨模态自监督学习的轴承故障诊断方法研究
1
2024
... 多头注意力机制通过并行运作多个独立注意力头,学习并建立输入序列中任意标记对之间的关联强度.这使得序列中的任一标记都能自适应地融合对其最具信息量的其他标记的特征[17 ] ,从而显著提升长时序依赖建模能力.其核心组件是缩放点积注意力模块,可通过式(5) 计算其注意力权重: ...
针对数据分布差异的图像处理方法研究及应用
1
2025
... 残差连接x i n + M H A x i n M H A _ o u t + F F N M H A _ o u t [18 ] ,增强深层网络训练的稳定性. ...
针对数据分布差异的图像处理方法研究及应用
1
2025
... 残差连接x i n + M H A x i n M H A _ o u t + F F N M H A _ o u t [18 ] ,增强深层网络训练的稳定性. ...
基于集成学习技术的隧道围岩智能分级方法研究
1
2021
... 在数据预处理阶段,采集多工况、多隧道凿岩机随钻数据,采集频率为40 ms.随钻数据涵盖钻孔深度信息及钻机工作状态实时监测参数,关键随钻参数有冲击压力、推进压力、回转压力、推进速度和水流量[19 ] 等,如表1 所示.随后,对随钻数据进行缺失值补充、噪声过滤等处理.依据回转压力、推进速度等参数在故障状态下的阈值,为每条数据打上相应的标签.为增强模型的工程应用性,将标签设计为正常状态、一级卡钻、二级卡钻、一级空打和二级空打等5类,使控制系统能按照标签等级设计响应的调整策略,实现提前规避故障及使钻进效率最大化的目标. ...
基于集成学习技术的隧道围岩智能分级方法研究
1
2021
... 在数据预处理阶段,采集多工况、多隧道凿岩机随钻数据,采集频率为40 ms.随钻数据涵盖钻孔深度信息及钻机工作状态实时监测参数,关键随钻参数有冲击压力、推进压力、回转压力、推进速度和水流量[19 ] 等,如表1 所示.随后,对随钻数据进行缺失值补充、噪声过滤等处理.依据回转压力、推进速度等参数在故障状态下的阈值,为每条数据打上相应的标签.为增强模型的工程应用性,将标签设计为正常状态、一级卡钻、二级卡钻、一级空打和二级空打等5类,使控制系统能按照标签等级设计响应的调整策略,实现提前规避故障及使钻进效率最大化的目标. ...
基于Transformer与元学习的小样本滚动轴承故障诊断研究
1
2024
... 在模型训练阶段,定义故障发生前一段时间内的随钻数据为故障前兆数据.为实现预测,需确定故障前兆数据中用于训练的时序数据段段长和控制系统的调节窗口长度.观察故障前兆数据的特征,故障前兆数据的划分如图3 所示.然后,将符合段长要求的训练数据输入时序标记的分类模型中,通过带预热策略的余弦退火学习率调度器与L2正则化权重衰减机制[20 ] ,驱动Transformer网络对时序演变规律进行深度挖掘,并基于分类准确率阈值及测试集的分类准确率反复迭代优化段长,直至确定.最后,采用早停策略锁定最优模型参数后保存权重. ...
基于Transformer与元学习的小样本滚动轴承故障诊断研究
1
2024
... 在模型训练阶段,定义故障发生前一段时间内的随钻数据为故障前兆数据.为实现预测,需确定故障前兆数据中用于训练的时序数据段段长和控制系统的调节窗口长度.观察故障前兆数据的特征,故障前兆数据的划分如图3 所示.然后,将符合段长要求的训练数据输入时序标记的分类模型中,通过带预热策略的余弦退火学习率调度器与L2正则化权重衰减机制[20 ] ,驱动Transformer网络对时序演变规律进行深度挖掘,并基于分类准确率阈值及测试集的分类准确率反复迭代优化段长,直至确定.最后,采用早停策略锁定最优模型参数后保存权重. ...
Predicting alloying element yield in converter steelmaking using t-SNE-WOA-LSTM
1
2024
... 对模型泛化能力的评估离不开对特征分布的考察.采用t-SNE(t-distribution stochastic neighbour embedding,t分布随机近邻嵌入)[21 ] 对高维特征进行降维可视化,结果如图5 所示.由图可知,由本文提出的神经网络提取的特征空间中,同类样本点最密集(类内样本聚集性最强),不同类样本点的界限最清晰(不同类间的分离度最高).这一结果直观验证了模型卓越的特征提取能力和泛化潜力. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}