基于特征点动态重映射的机械臂视觉伺服实时避障方法
Real-time obstacle avoidance method via dynamic feature point remapping for robotic arm visual servoing
基于特征点动态重映射的机械臂视觉伺服实时避障方法 |
| 刘俊,朱姿娜,潘雪云,孙晓燕 |
|
Real-time obstacle avoidance method via dynamic feature point remapping for robotic arm visual servoing |
| Jun LIU,Zina ZHU,Xueyun PAN,Xiaoyan SUN |
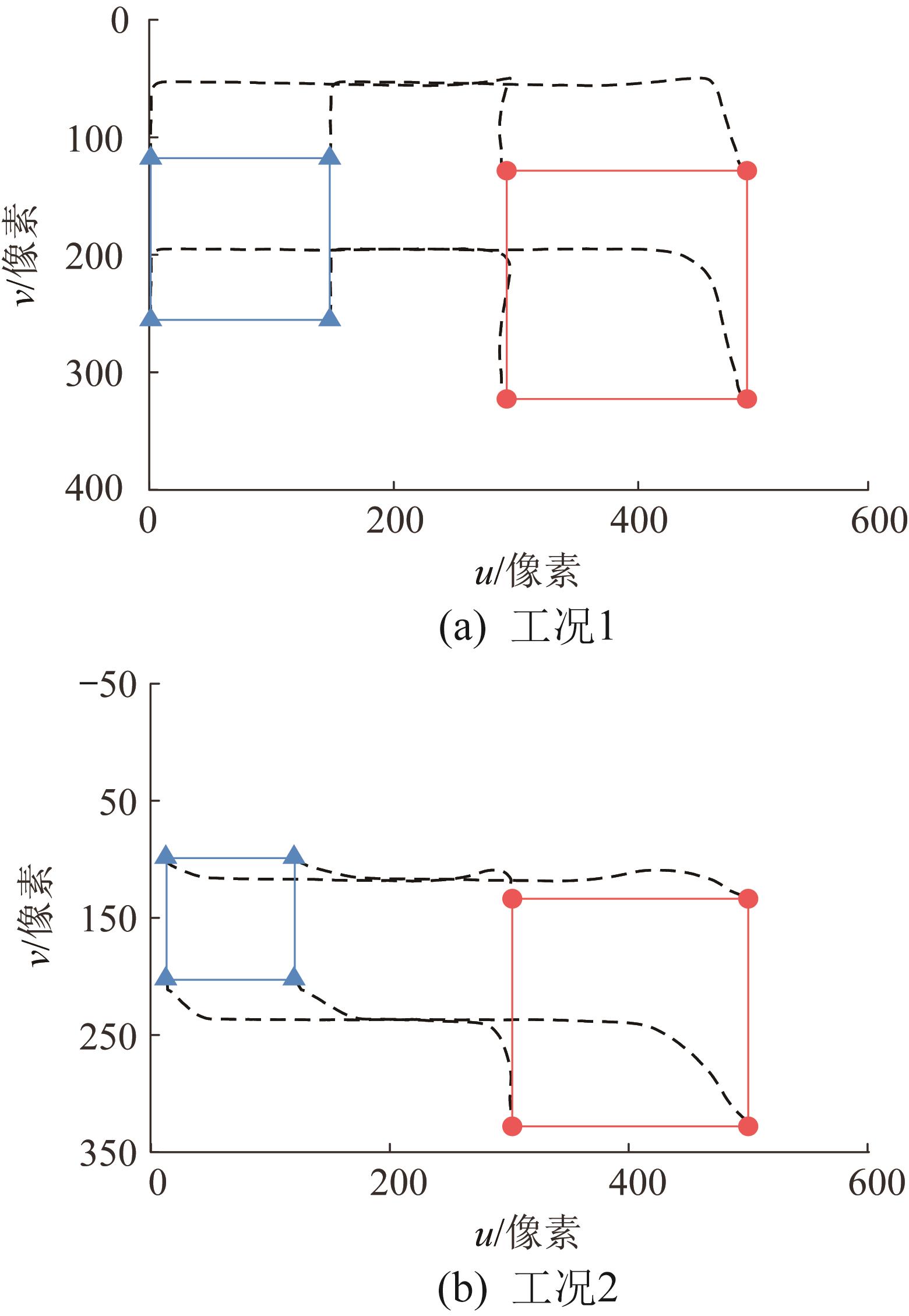
| 图9 不同工况下特征点的运动轨迹 |
| Fig.9 Motion trajectories of feature points under different working conditions |
|
|