面向泥浆遮挡的涂抹机器人双目视觉定位方法研究
Stereo visual localization method for plastering robots under mud occlusion
面向泥浆遮挡的涂抹机器人双目视觉定位方法研究 |
| 左鹏,郑正鼎,高全杰,吴林飞,王红霞 |
|
Stereo visual localization method for plastering robots under mud occlusion |
| PENG ZUO,Zhengding ZHENG,Quanjie GAO,Linfei WU,Hongxia WANG |
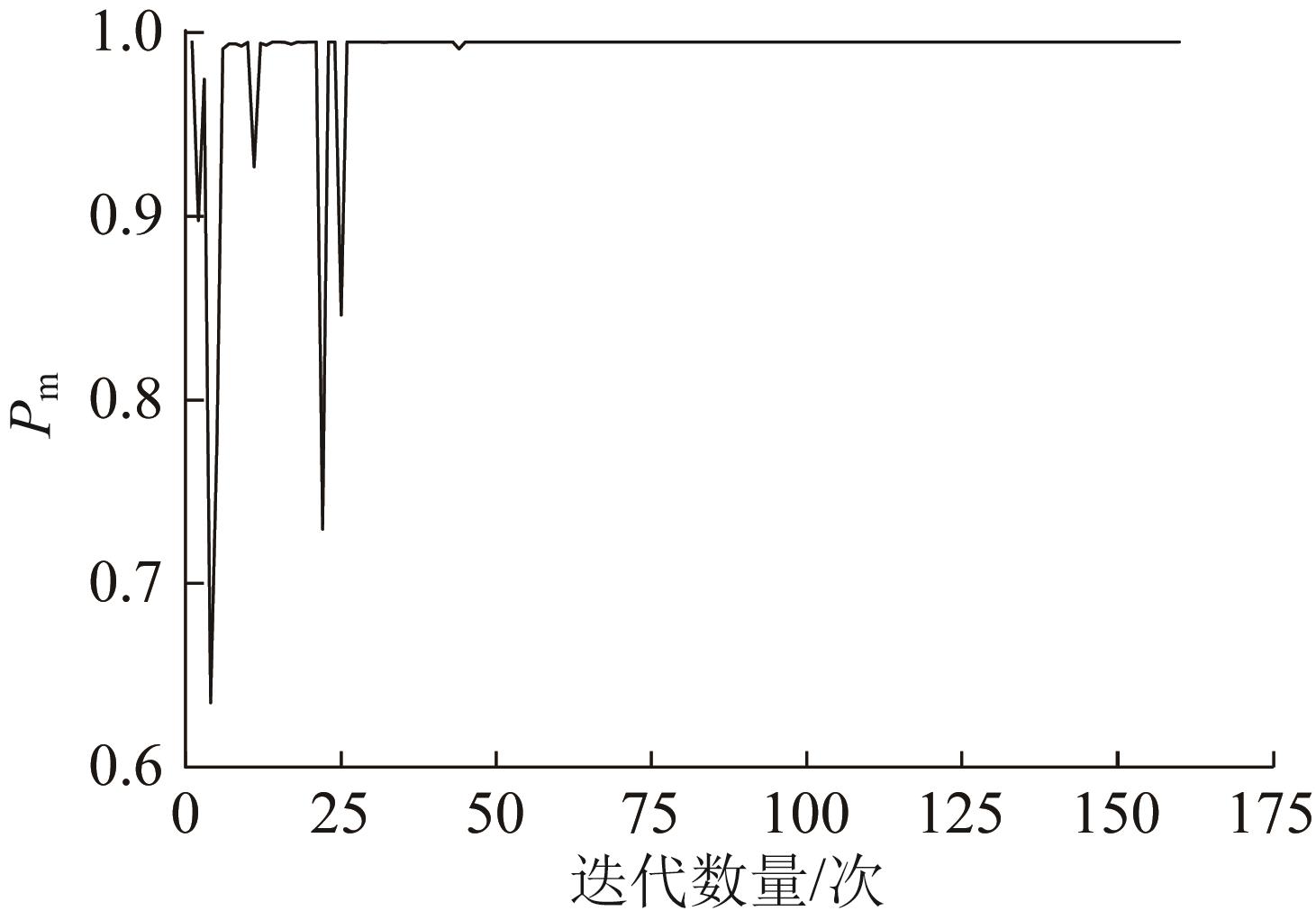
| 图9 模型识别精度均值 |
| Fig.9 Average recognition accuracy of model |
|
|