基于各向异性摩擦的软体爬行机器人设计与实验研究
Design and experimental study of soft crawling robots based on anisotropic friction
基于各向异性摩擦的软体爬行机器人设计与实验研究 |
| 徐锦涛,蔡金虎,唐玲玲,黄龙 |
|
Design and experimental study of soft crawling robots based on anisotropic friction |
| Jintao XU,Jinhu CAI,Lingling TANG,Long HUANG |
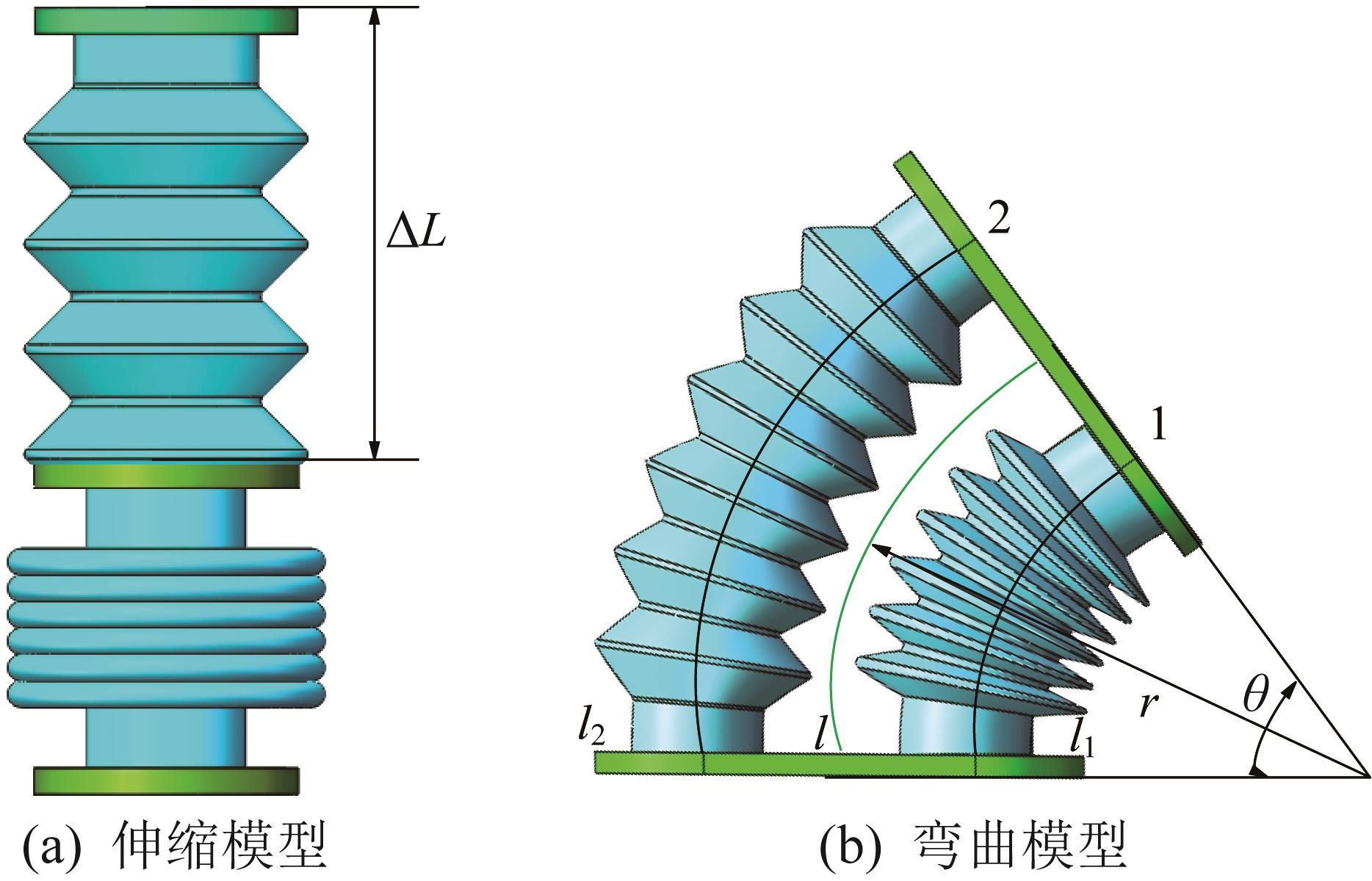
| 图4 双波纹联合致动器的变形模型 |
| Fig.4 Deformation model of double-corrugated combined actuator |
|
|