基于改进SMC与ILC的泳池清洁机器人轨迹跟踪控制
Trajectory tracking control of swimming pool cleaning robot based on improved SMC and ILC
基于改进SMC与ILC的泳池清洁机器人轨迹跟踪控制 |
| 唐军,许海琳,张少文 |
|
Trajectory tracking control of swimming pool cleaning robot based on improved SMC and ILC |
| Jun TANG,Hailin XU,Shaowen ZHANG |
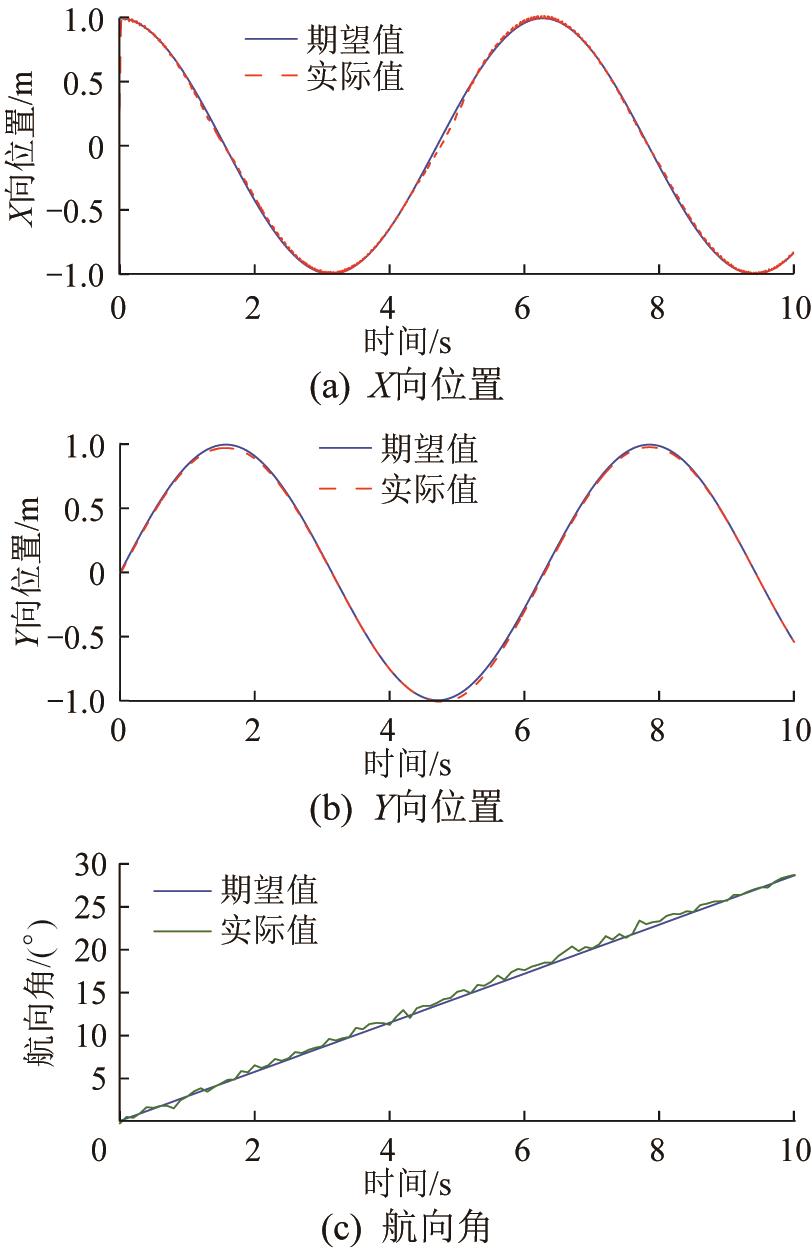
| 图5 基于非线性积分SMC-ILC的机器人轨迹跟踪仿真结果 |
| Fig.5 Simulation results of robot trajectory tracking based on nonlinear integral SMC-ILC |
|
|