基于层次包围盒的纱筒装取机械臂碰撞检测方法
Collision detection method for yarn cylinder loading robotic arm based on hierarchical bounding box
基于层次包围盒的纱筒装取机械臂碰撞检测方法 |
| 姬晨辉,沈丹峰,赵刚,孙海涛 |
|
Collision detection method for yarn cylinder loading robotic arm based on hierarchical bounding box |
| Chenhui JI,Danfeng SHEN,Gang ZHAO,Haitao SUN |
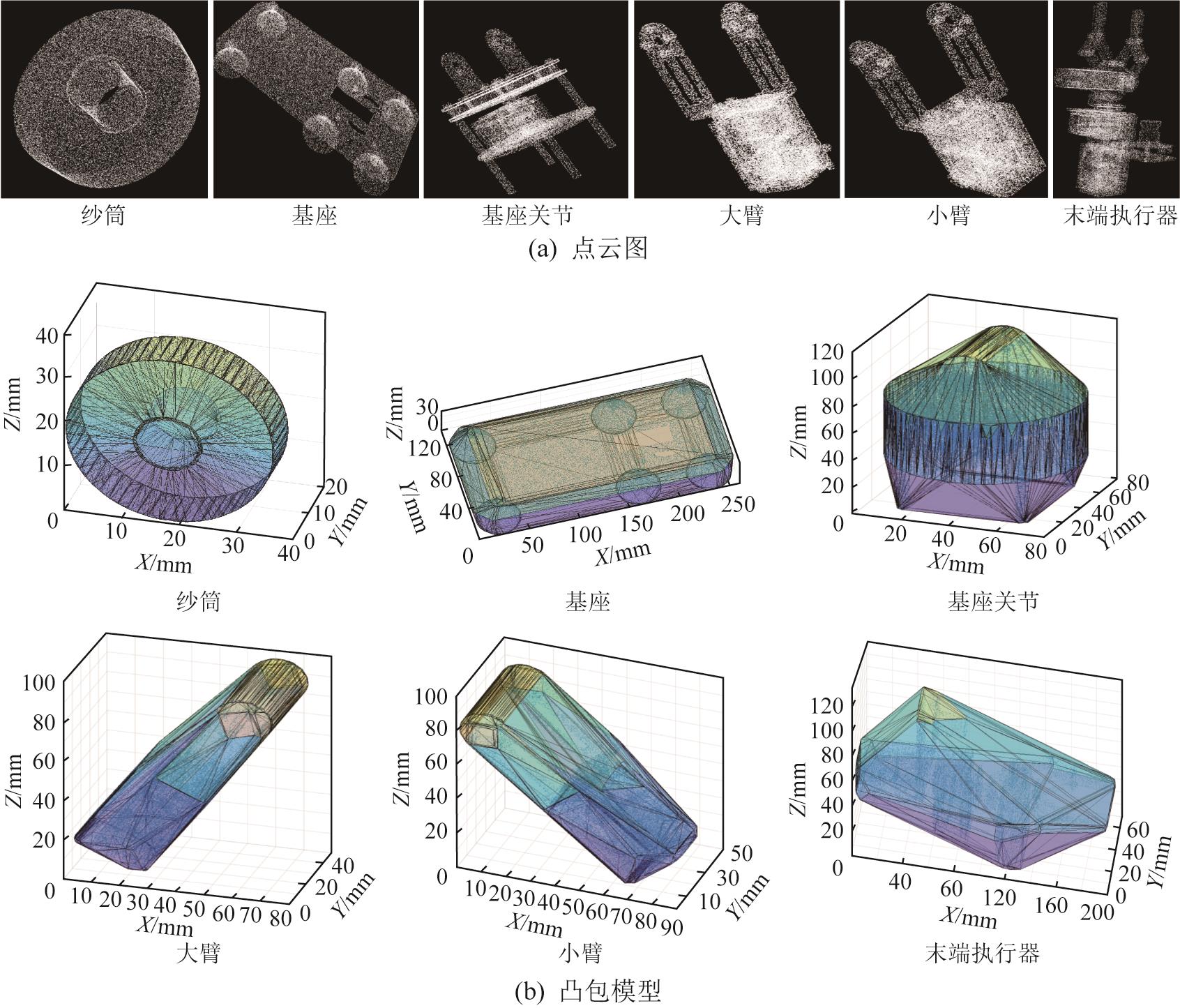
| 图5 纱筒和机械臂各部分的点云图与凸包模型 |
| Fig.5 Point cloud maps and convex hull models of yarn cylinder and each part of robotic arm |
|
|