基于改进麻雀搜索算法的机械臂多目标轨迹优化方法
Multi-objective trajectory optimization method for manipulator based on improved sparrow search algorithm
基于改进麻雀搜索算法的机械臂多目标轨迹优化方法 |
| 李玲,侯玉龙,李瑶,罗丹,解妙霞 |
|
Multi-objective trajectory optimization method for manipulator based on improved sparrow search algorithm |
| Ling LI,Yulong HOU,Yao LI,Dan LUO,Miaoxia XIE |
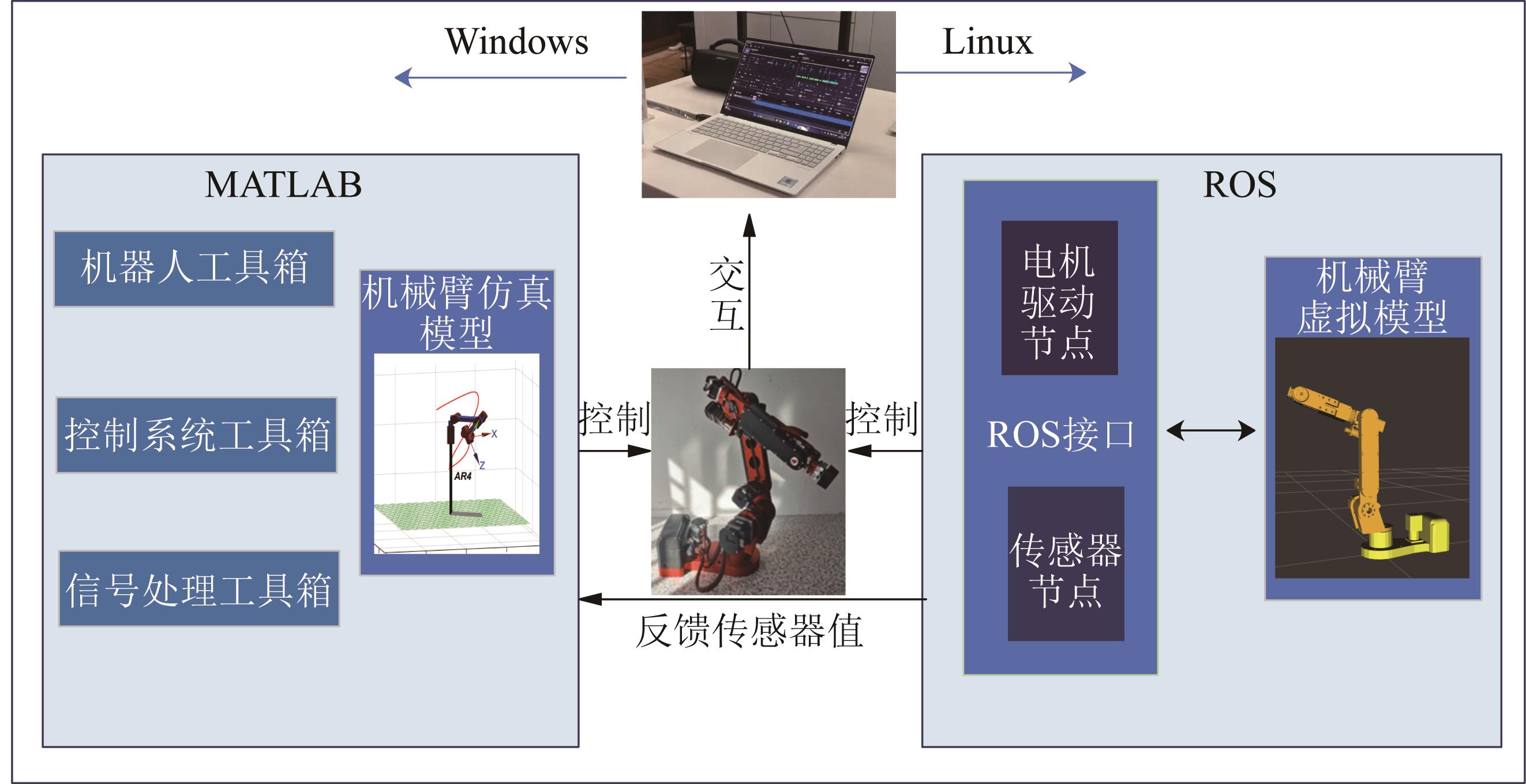
| 图8 机械臂控制系统的通信架构 |
| Fig.8 Communication architecture of manipulator control system |
|
|