基于改进麻雀搜索算法的机械臂多目标轨迹优化方法
Multi-objective trajectory optimization method for manipulator based on improved sparrow search algorithm
基于改进麻雀搜索算法的机械臂多目标轨迹优化方法 |
| 李玲,侯玉龙,李瑶,罗丹,解妙霞 |
|
Multi-objective trajectory optimization method for manipulator based on improved sparrow search algorithm |
| Ling LI,Yulong HOU,Yao LI,Dan LUO,Miaoxia XIE |
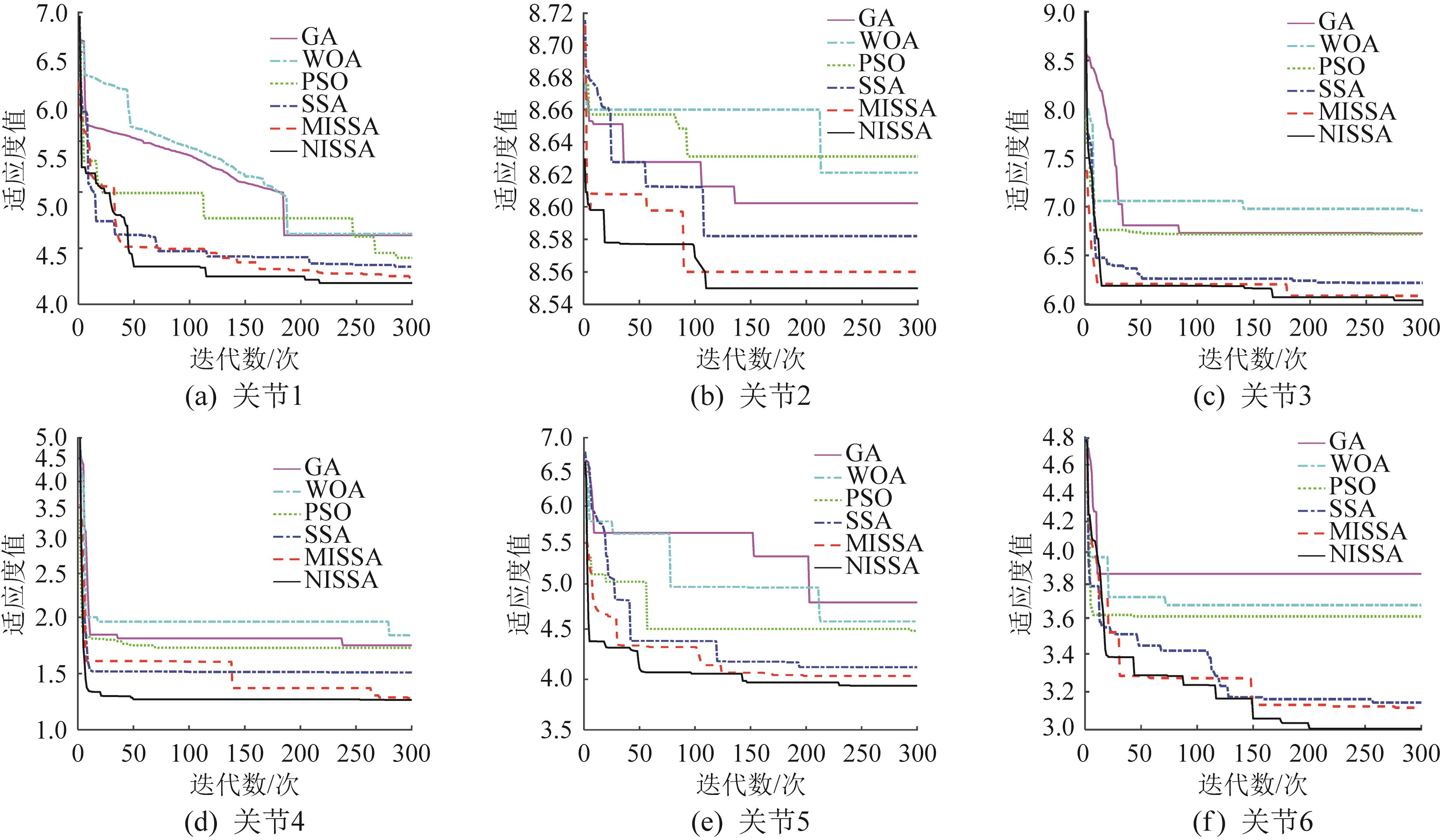
| 图7 机械臂各关节轨迹优化中各算法的收敛曲线对比 |
| Fig.7 Comparison of convergence curves of various algorithms during trajectory optimization of each joint in manipulator |
|
|