涉核作业机器人刚度与末端变形研究
Research on stiffness and end deformation of nuclear related operation robot
涉核作业机器人刚度与末端变形研究 |
| 蒋君侠,张渊淞,仲笑欧 |
|
Research on stiffness and end deformation of nuclear related operation robot |
| Junxia JIANG,Yuansong ZHANG,Xiaoou ZHONG |
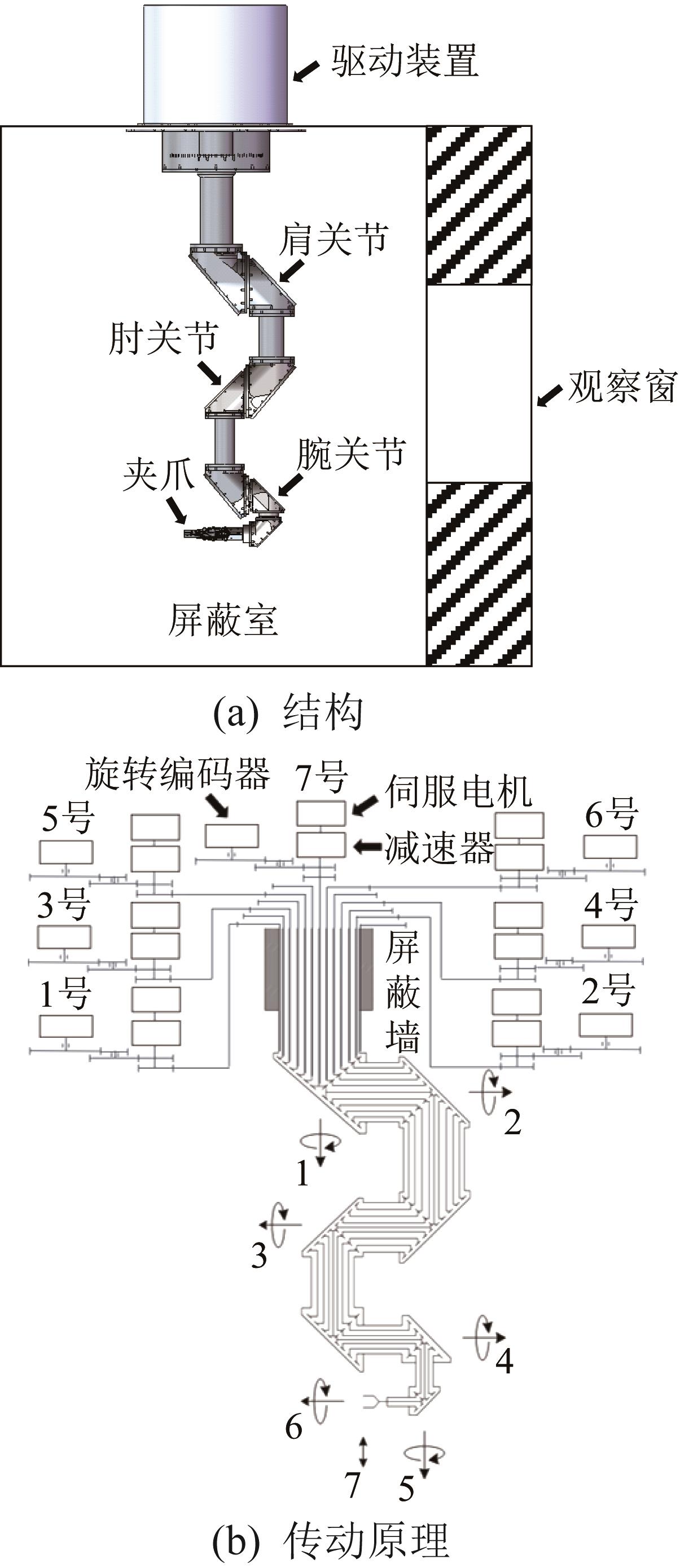
| 图1 涉核作业机器人结构及传动原理 |
| Fig.1 Structure and transmission principle of nuclear related operation robot |
|
|