一种可变径多模式移动并联机器人的设计与分析
Design and analysis of a variable-diameter multi-mode mobile parallel robot
一种可变径多模式移动并联机器人的设计与分析 |
| 刘玉航,张春燕,田正雨,刘正阳 |
|
Design and analysis of a variable-diameter multi-mode mobile parallel robot |
| Yuhang LIU,Chunyan ZHANG,Zhengyu TIAN,Zhengyang LIU |
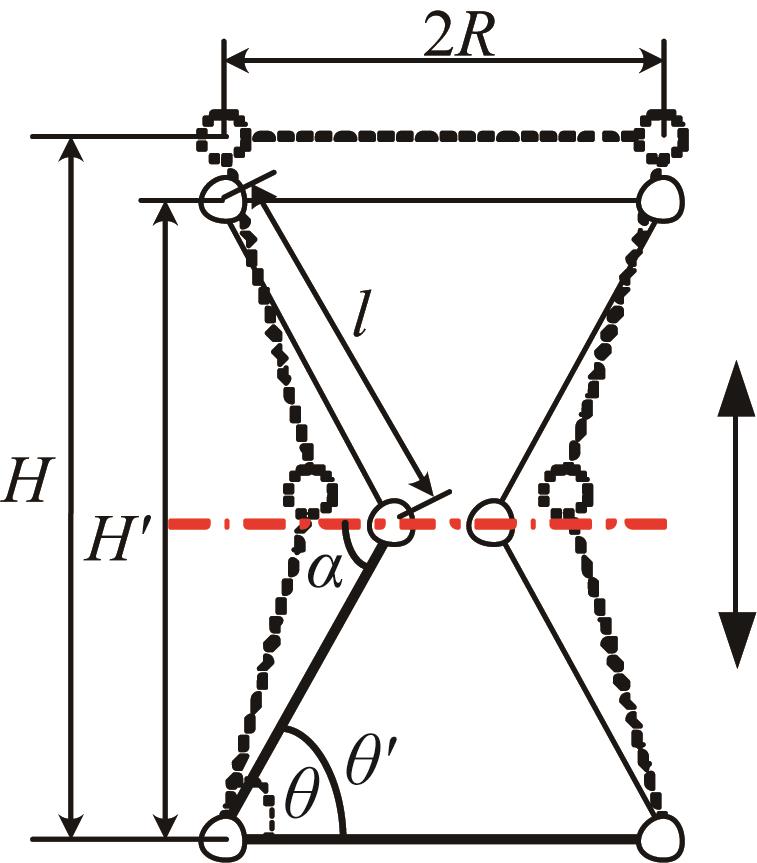
| 图10 URU支链折展原理 |
| Fig.10 Folding and unfolding principle of URU branch chain |
|
|