基于双目视觉的软体机械臂几何参数测量方法
Geometric parameter measurement method for soft robotic arms based on binocular vision
基于双目视觉的软体机械臂几何参数测量方法 |
| 舒申,王家梁,胡俊峰,张宇,楚凯,周浩,蔡铭炜 |
|
Geometric parameter measurement method for soft robotic arms based on binocular vision |
| Shen SHU,Jialiang WANG,Junfeng HU,Yu ZHANG,Kai CHU,Hao ZHOU,Mingwei CAI |
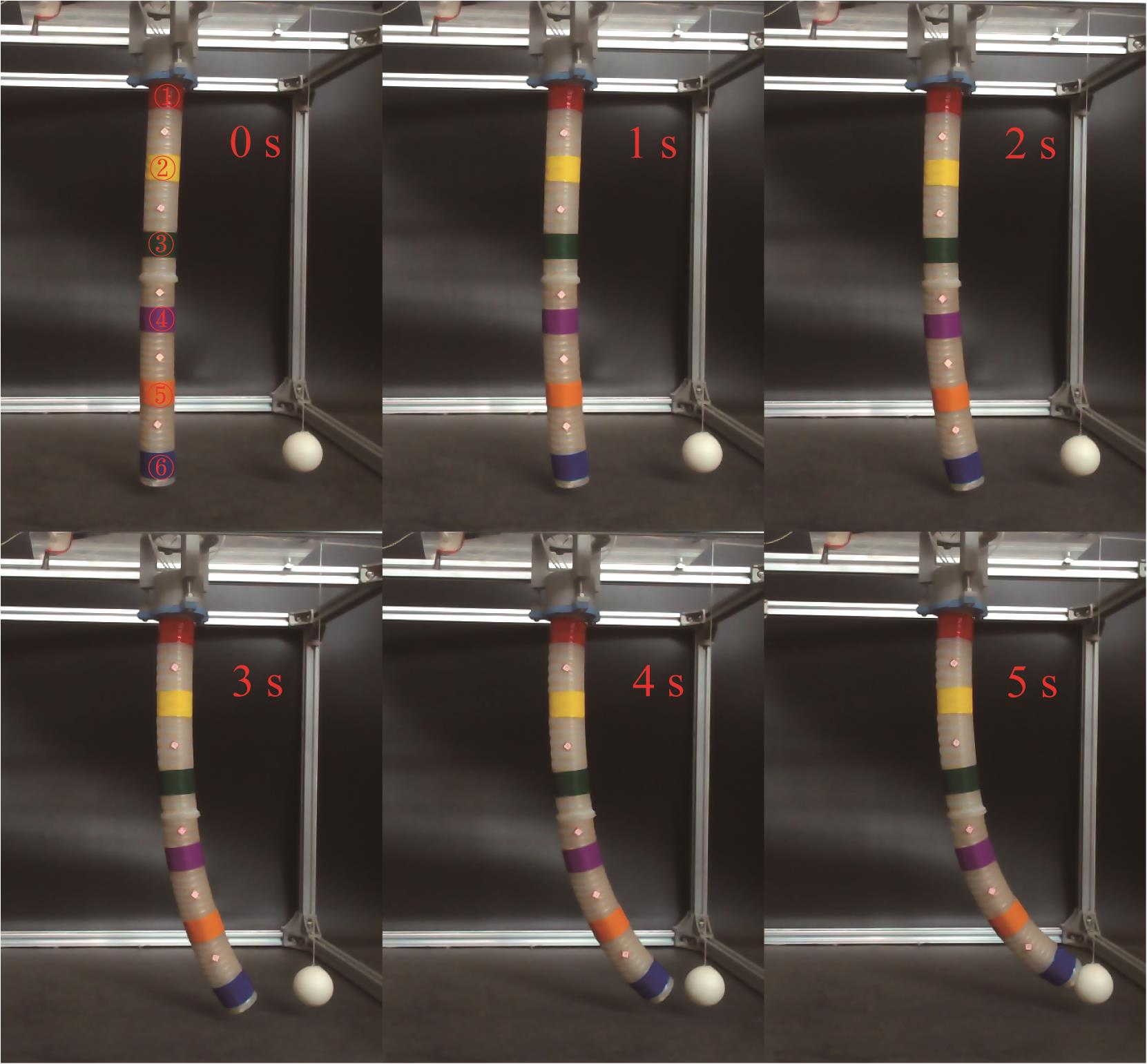
| 图11 不同时刻下L形软体机械臂的姿态 |
| Fig.11 Postures of L-shaped soft robotic arm at different times |
|
|