行星式欠驱动可变形履带移动机构的设计与分析
Design and analysis of planetary underactuated transformable tracked mobile mechanism
行星式欠驱动可变形履带移动机构的设计与分析 |
| 张娜,荀致远,姚燕安 |
|
Design and analysis of planetary underactuated transformable tracked mobile mechanism |
| Na ZHANG,Zhiyuan XUN,Yan'an YAO |
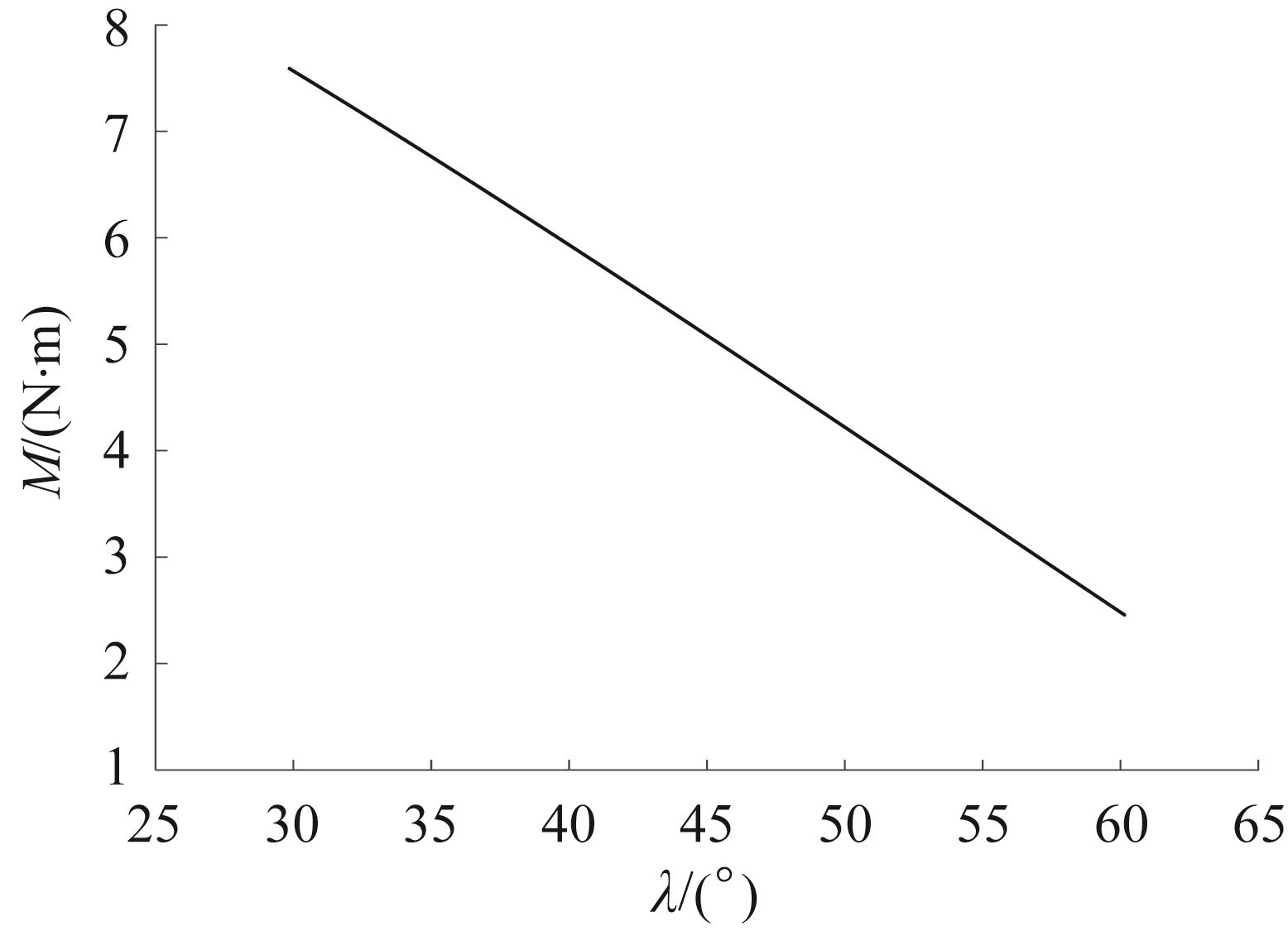
| 图16 正交模式履带移动机构翻越凸台第一阶段所需的驱动扭矩与侧板夹角的关系 |
| Fig.16 Relationship between required driving torque and side blate angle of orthogonal mode tracked mobile mechanism during the first stage of surmounting protrusion |
|
|