仿变形虫可重构履带机器人设计与避障性能分析
Design and obstacle-avoidance performance analysis of amoeba-like reconfigurable tracked robot
仿变形虫可重构履带机器人设计与避障性能分析 |
| 张明路,刘宗厚,王经天,高强,许志凡,曹刘猛 |
|
Design and obstacle-avoidance performance analysis of amoeba-like reconfigurable tracked robot |
| Minglu ZHANG,Zonghou LIU,Jingtian WANG,Qiang GAO,Zhifan XU,Liumeng CAO |
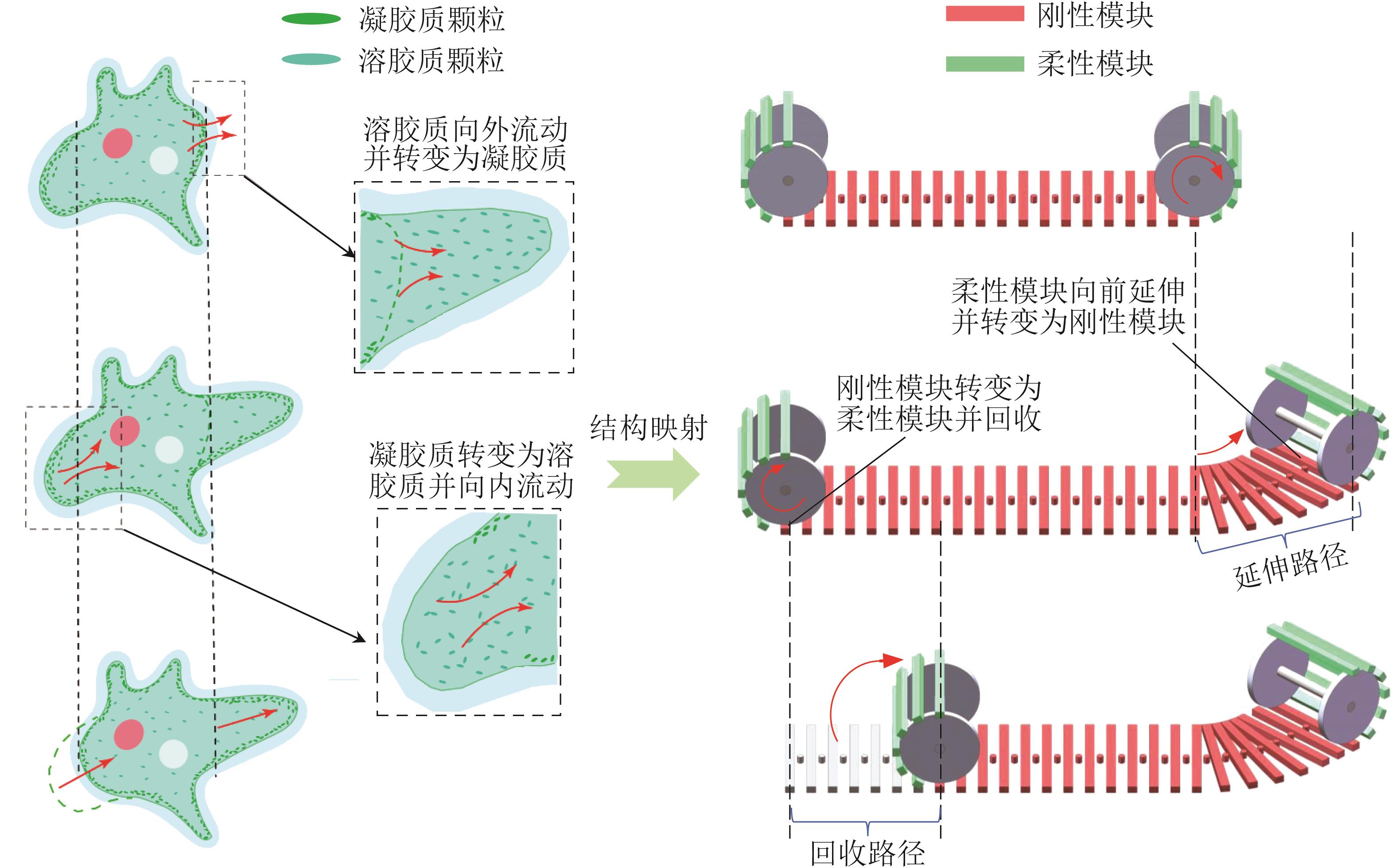
| 图2 仿变形虫可重构履带机器人的设计理念 |
| Fig.2 Design concept of amoeba-like reconfigurable tracked robot |
|
|