基于领航-跟随及人工势场的环卫机器人编队研究
Research on environmental sanitation robot formation based on leader-follower and artificial potential field
基于领航-跟随及人工势场的环卫机器人编队研究 |
| 谢宇明,尹汉锋,肖慧慧 |
|
Research on environmental sanitation robot formation based on leader-follower and artificial potential field |
| Yuming XIE,Hanfeng YIN,Huihui XIAO |
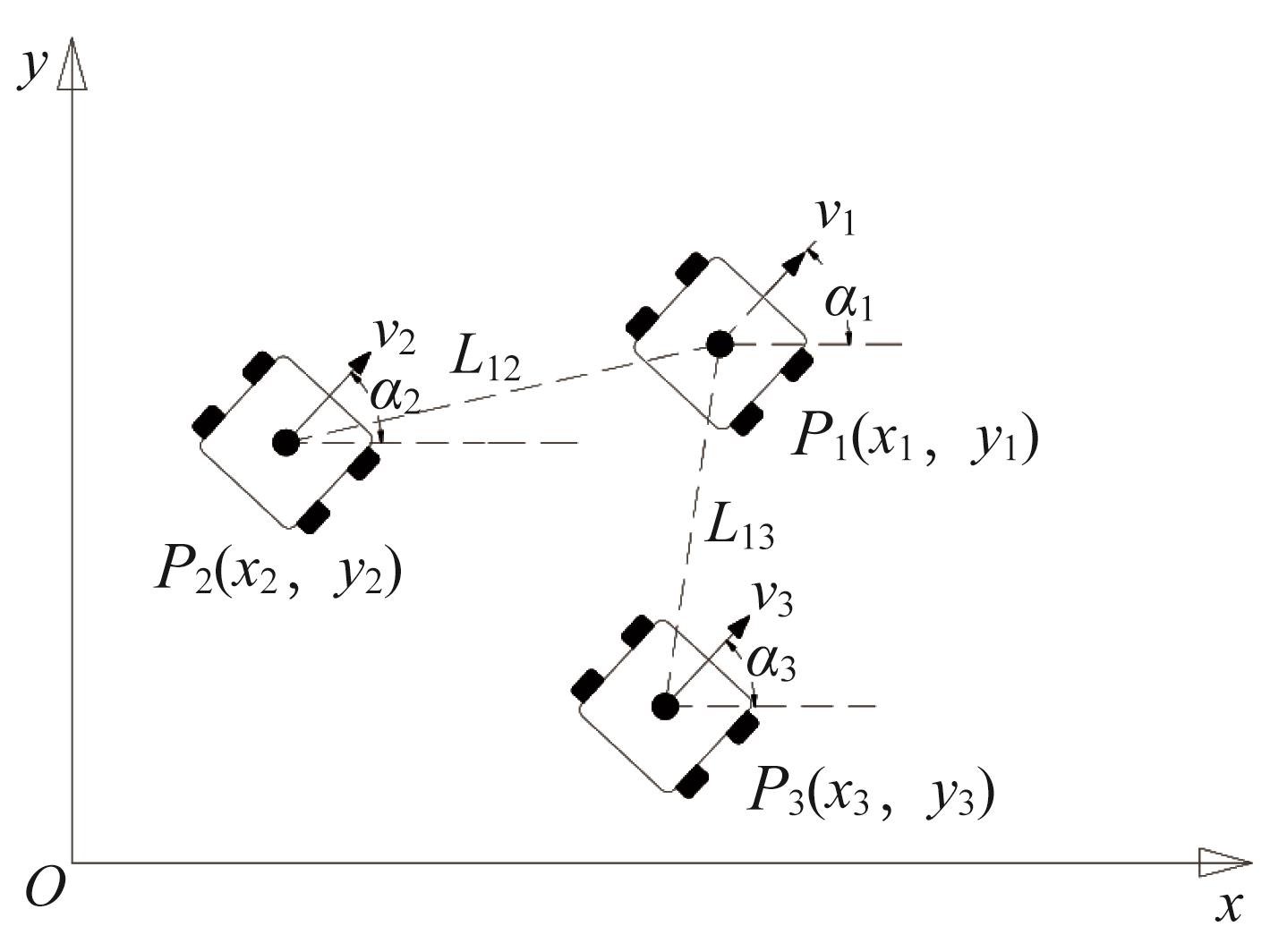
| 图3 环卫机器人编队模型 |
| Fig.3 Environmental sanitation robot formation model |
|
|