


在算法模型优化方面,Li等人[5]提出了引入提前退出机制的DNN(deep neural network,深度神经网络)模型,缩短了计算时间。Nikouei等人[6]提出了一种L-CNN(lightweight convolutional neural network,轻量级卷积神经网络)模型,以较小的计算量实现了较高的识别准确率和识别速度。Yao等人[7]提出了一种名为DeepIoT(deep internet of things,深度物联网)的剪枝方法,该方法通过查找最少数量的非冗余隐藏元素,将深度学习网络结构压缩为较小的密集矩阵。李华等人[8]通过在空间图卷积模块中引入注意力机制,以更好地提取人体各个关节之间的关系,实现了基于关节识别的行为识别神经网络模型的轻量化。辛莉等人[9]通过更改后处理的方式,在保证复杂场景下车牌识别网络识别速度的前提下提高了识别准确率。Li等人[10]提出了一种基于Token的人体姿态估计方法,通过Transformer的多头自注意力机制来学习不同关键点之间的关联性,极大地减少了模型的参数量和计算量。在云边协同结构优化方面,Li等人[11]针对DNN在边缘计算领域的应用进行了研究,提出了在保证服务质量前提下的最大任务并行数。Liu等人[12]提出了一种采用基于边缘计算的服务计算范式的食品识别系统,并通过添加预处理步骤降低了系统功耗并加快了系统响应速度。Jiang等人[13]提出了一种新型视频分析系统,利用网络迁徙方法实现了计算共享,改善了视频分析效果。在卸载方案优化方面,Teerapittayanon等人[14]提出了一种分布式DNN,通过将计算任务分布到云端和边缘服务器上,降低了通信成本。Mao等人[15]提出了一种Mo-DNN(mobile distributed DNN,分布式移动深度神经网络),以自适应负载的方式将计算任务卸载至分布式边缘设备上,提高了DNN的性能。Zhao等人[16]提出了DeepThings框架,通过卷积层融合分区减少了内存占用,提高了计算速度。Ding等人[17]提出了一种云边缘协作框架,该框架在边缘服务器上部署了一个浅层模型,并在云端服务器上部署了一个深度模型,使得认知服务的平均响应时间缩短了55.08%,准确率提高了26.70%。Chakraborty等人[18]在道路监控系统中使用K-最近邻算法来形成警报消息的分布集群,使得该系统的延迟缩短了12%~44%,功耗降低了50%。Hsu等人[19]提出了一种基于机会成本的任务卸载算法来优化资源分配,该算法的阻塞概率降低了59.3%,功耗节省了58.7%,服务质量提高了47.6%。
综上可知,在云边协同智能监控领域,任务卸载方案优化[20]的改进效果显著超越了算法模型优化和云边协同结构优化。但是,对于任务卸载方案优化,仍存在一些尚未解决的问题:1)现有的任务卸载方案主要基于系统的实时负载设计,即根据计算负荷来分配计算任务,存在延后性,无法满足实时性要求;2)现有的任务卸载方案主要针对DNN结构进行优化,优化指标通常为识别准确率和识别速度,并未考虑卸载方案对系统功耗的影响。
针对上述问题,本文提出了一种基于场景人物数量的任务卸载方案。该任务卸载方案通过引入预处理步骤,对工作场景中的人物数量进行识别,并采用可变采样率的方式分配边缘计算设备的算力。最后,在复兴号动车组生产线的智能监控系统上对所提出的任务卸载方案进行测试,以验证其在优化系统运行稳定性和识别效果上的有效性。
1 云边协同智能监控系统介绍
本文主要针对面向离散生产场景所构建的云边协同智能监控系统。该系统利用云边协同实现边缘侧设备、人员、工艺流程的识别,其结构如图1所示。
图1
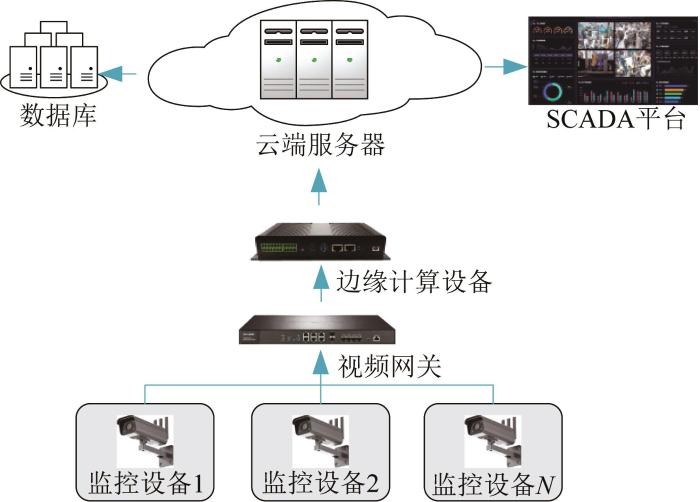
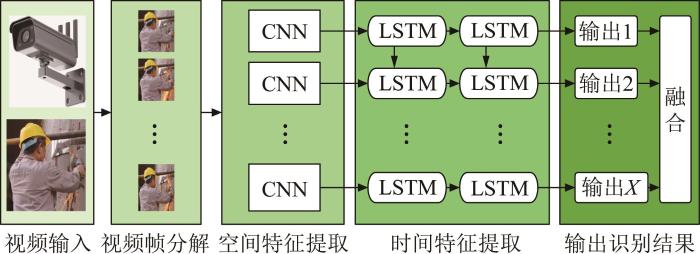
云边协同智能监控系统利用监控摄像头采集视频数据,并通过网关将视频数据传输至边缘计算设备以进行下一步处理。边缘计算设备内置基于LRCN(long-term recurrent convolutional network,长期循环卷积网络)的行为识别算法,可有效提取工作场景中人员的行为特征并进行分类。分类结果和视频数据均被上传至云端服务器,以便进行存储和传递至SCADA(supervisory control and data acquisition,监控与数据采集)平台,供管理者实时查看。在该系统中,边缘计算设备主要负责视频数据的特征提取与分类,而云端服务器主要负责行为识别算法的更新与训练。
Wang等人[21]提出,最能体现智能监控系统识别效果和运行稳定性的3个参数分别为识别准确率(recognition accuracy)、延迟(latency)和功耗(power consumption),其定义具体如下。
1)识别准确率是指分类正确的样本数与总样本数的比值,用于评估算法或模型的性能[23]。在一些对安全性要求较高的应用场景中,如自动驾驶系统和道路导航系统,对识别准确率的要求很高。但在智能监控领域,由于可以进行多帧采集和重复判断,故对识别准确率的要求并不严格。此外,过高的识别准确率需要更深层次的DNN,这会增加边缘计算设备的运算压力。因此,在智能监控领域,一般不将识别准确率作为唯一的评价指标。识别准确率A的计算式如下:
式中:
2)延迟是指输入用户请求至得到预测结果的时间间隔,包括预处理、算法运行和后处理所花费的时间[22]。边缘计算可将计算资源和存储能力尽可能地靠近数据源和终端设备,以减少数据传输时间和网络延迟,这样可实现快速响应,更适用于对实时性要求较高的应用场景。
3)功耗是指设备或系统在执行任务时单位时间内消耗的电能。通常情况下,由于边缘计算设备的整体功率和性能有限,但在运行复杂模型时可能会引入大量的计算和通信开销,这可能会导致性能优秀而运算复杂的模型在边缘计算设备上的运行效果不理想。因此,功耗也是智能监控领域较为关注的评价指标。
2 云边协同智能监控系统运行参数采集
为了评估目前所采用的并行式任务卸载方案的效果,对现有云边协同智能监控系统的识别准确率、延迟和功耗数据进行采集。
2.1 识别准确率提取
为了获取现有云边协同智能监控系统的识别准确率以及便于后续比较,本文使用一个针对复兴号动车组生产线的危险行为数据集对系统进行了测试。该数据集包含21个与生产流程安全相关的行为类型,如跌倒、触电、是否佩戴安全帽等,如图2所示。在复兴号动车组生产车间,采集实际生产监控视频作为数据来源。为了增加数据集的多样性,本文通过互联网获取了监控视频中未出现的起火、触电等事故的视频数据,以更好地评估基于LRCN的行为识别算法的识别准确率。所采集的数据集共包含2 100个视频数据,其中1 260个视频用作训练集,420个视频用作测试集,另外420个视频用作交叉验证集。
图2

首先,针对现有的LRCN,在云端服务器上利用生产场景人员行为数据集进行训练。随后,从测试集中提取并制作包含21种危险行为的7 h长视频以及1 h的正常行为视频,并将这2段视频整合成一段长视频。将这段长视频通过视频网关的接口1传入LRCN进行测试。同时,为了模拟实际应用场景中多个监控摄像头共用同一网关和边缘计算设备的情况,将上述长视频传入视频网关的接口2。此外,由于实际工作场景中存在长时间无人的停产状态,制作了一段8 h的无人视频,并将其传入视频网关的接口3,以模拟停产状态。基于同时传入的3段长视频开展识别准确率测试,将智能监控系统的识别结果与真实的行为标签进行对比,并利用
图3
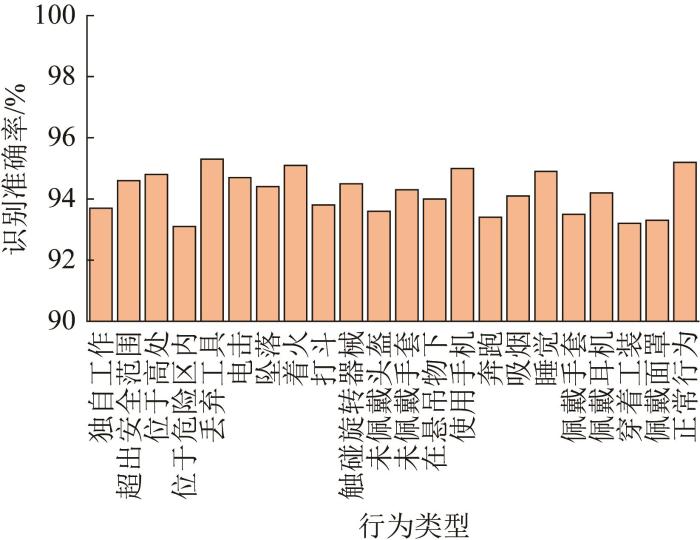
图3
智能监控系统的识别准确率
Fig.3
Identification accuracy of intelligent monitoring system
2.2 延迟提取
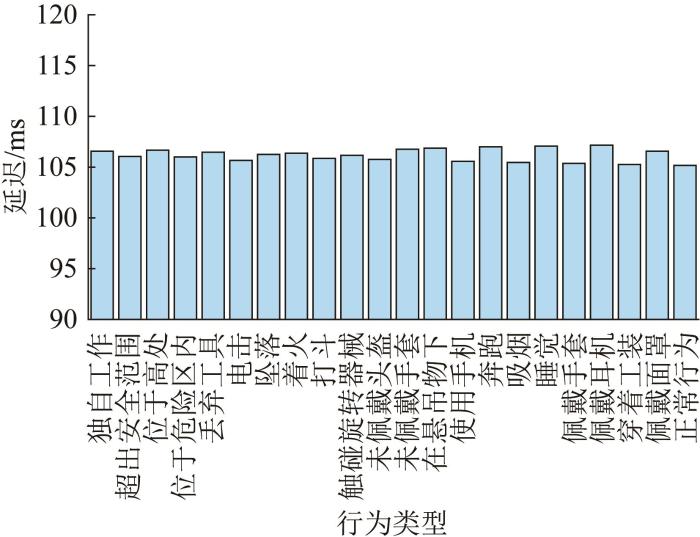
在计算机视觉领域,帧率和处理时间常常用作评估算法或模型在处理视频时的性能指标。其中,帧率表示算法或模型在单位时间内能够处理的图像或视频帧数,单位为帧/s;处理时间表示算法或模型处理每一帧图像或视频所花费的时间,单位为ms。通常情况下,较高的帧率和较短的处理时间说明算法或模型的处理速度更快,即性能更好。智能监控系统的延迟通常定义为从工作场景中出现人物开始到系统对人物行为进行识别并得到识别结果所需的时间。这一时间不仅包括算法或模型的处理时间,还包括数据传输和预处理所需的时间。鉴于帧率只能评估算法或模型的性能,而处理时间可以评估整个智能监控系统的延迟,本文使用Python编程语言中的Time模块来提取处理时间。该模块可以记录监控视频从传入网关开始到获得识别结果的时间。为了方便计算和提取处理时间,从生产场景人员行为数据集中重新提取了21段不同行为类型的视频以及1段正常行为视频以进行测试。每段视频的时长控制在5 s内,记录智能监控系统识别各个行为类型的延迟,结果如图4所示。由图4可知,该智能监控系统的平均延迟为106.17 ms。
图4
2.3 功耗提取
由于实际应用场景中监控摄像头和视频网关的数量可变,本文所提取的功耗仅包含智能监控系统的计算功耗,并不包含摄像头和网关等设备的功耗。为了提取功耗数据,在边缘计算设备上安装AID64软件,通过测量边缘计算设备待机功耗和工作功耗之间的差值,来获取实际的预处理、识别算法运行以及后处理的功耗。由于AID64软件所提供的是边缘计算设备的实时功耗数据,故须将其转换为平均功耗,计算式如下:
式中:
图5
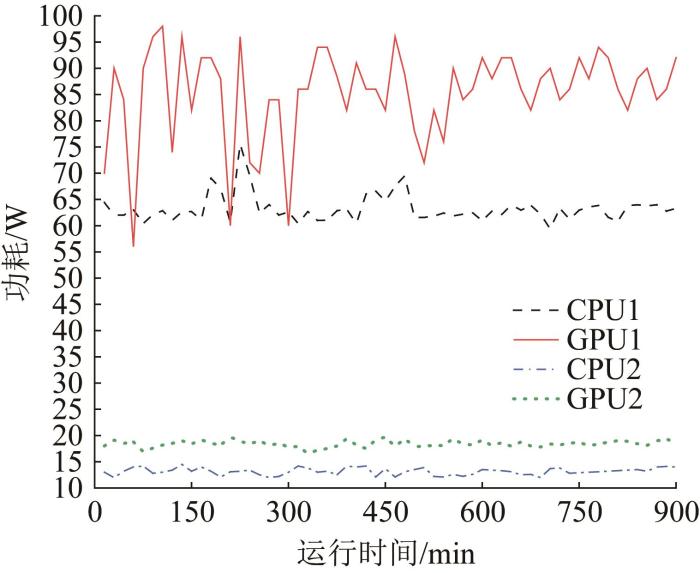
图5
智能监控系统的CPU、GPU功耗
Fig.5
Power consumption of CPU and GPU of intelligent monitoring system
图6
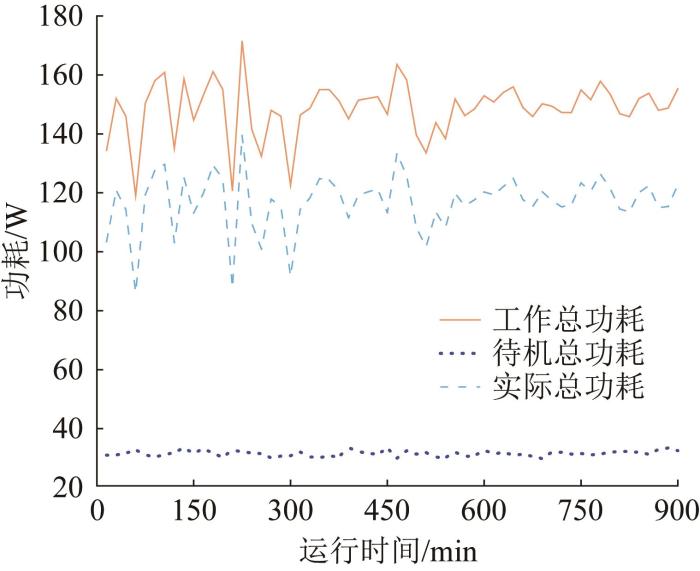
由图6可知,该智能监控系统的平均待机功耗为31.88 W,平均实际功耗为116.06 W,实际功耗的方差为145.32 W2,说明该系统的功耗曲线存在较大波动。这是因为智能监控系统在将多线路的监控任务卸载至边缘计算设备时采用了并行策略,并没有考虑场景变换所造成的计算压力的变化,导致计算资源未被充分利用。
3 基于场景人物数量的任务卸载方案
为了解决因任务并行处理而导致的系统功耗波动异常问题,提出了一种基于场景人物数量的任务卸载方案。该方案分为两部分:任务分类策略和任务处理策略。
3.1 任务分类策略
根据复兴号动车组生产线的实际生产场景,对智能监控任务进行分类,包括停产状态、正常状态和特殊状态。为了实现上述任务分类,在云边协同智能监控系统的预处理部分引入了一个场景人物数量识别模块,该模块具有一个轻量化DNN模型,用于准确识别不同工作场景中的人物数量,识别效果如图7所示。
图7

在完成场景人物数量识别后,通过程序编写来实现基于场景人物数量的监控任务分类,以便后续处理。监控任务的分类策略如表1所示。在后续的任务卸载方案中,将针对停产状态、正常状态和特殊状态这3种任务类型采取不同的处理策略。
表1 监控任务分类策略
Table 1
| 任务类型 | 人数/人 |
|---|---|
| 停产状态 | 0 |
| 正常状态 | 1~5 |
| 特殊状态 | >5 |
3.2 任务处理策略
图8
目前,我国监控设备视频流的帧率通常为25帧/s。因此,上述智能监控系统在处理视频流时,会进行在1 s内提取25帧关键帧的采样过程,即采样率为25 Hz,并将多个识别任务同时传入边缘计算设备。通常情况下,提高采样率可以增加数据的丰富性和细节,有助于提高系统的识别准确率[25]。但在实际应用中,具体的采样率应根据实际任务类型进行调整,以实现在计算资源有限的情况下获得较好的识别效果。
3.3 最佳采样率的确定
图9
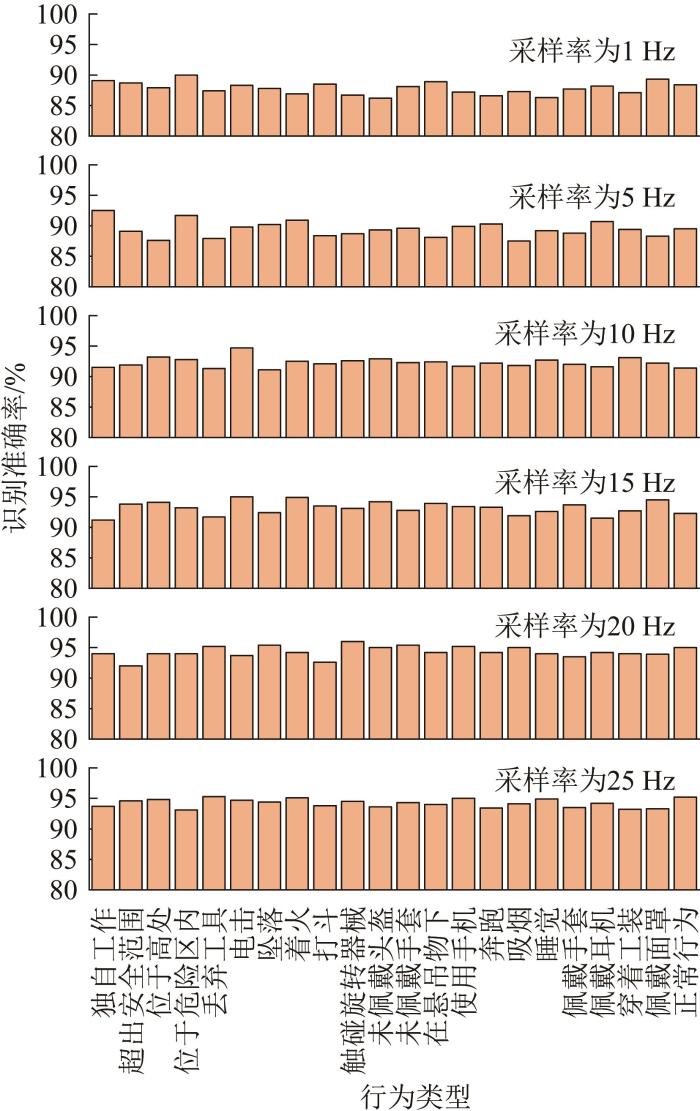
图9
不同采样率下智能监控系统的识别准确率
Fig.9
Recognition accuracy of intelligent monitoring system with different sampling rates
图10
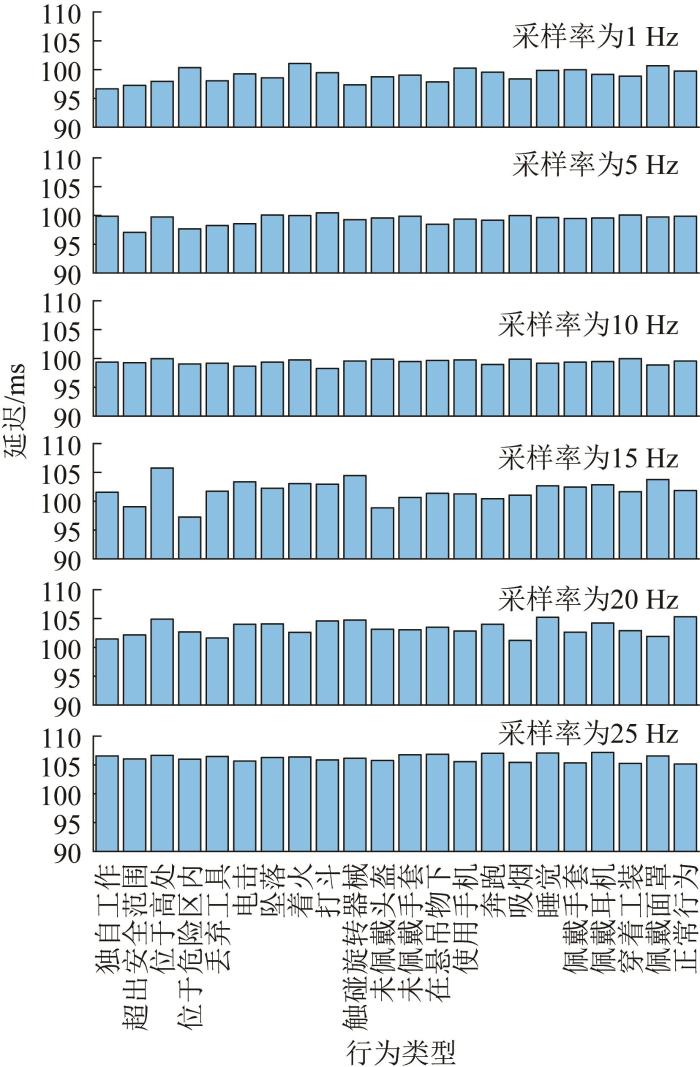
图10
不同采样率下智能监控系统的延迟
Fig.10
Delay of intelligent monitoring system with different sampling rates
表2 不同采样率下智能监控系统的运行参数
Table 2
| 采样率/Hz | 平均识别 准确率/% | 平均延迟/ ms | 平均功耗/ W |
|---|---|---|---|
| 1 | 87.45 | 99.43 | 112.71 |
| 5 | 89.50 | 99.51 | 112.93 |
| 10 | 92.21 | 99.58 | 113.59 |
| 15 | 93.60 | 101.80 | 115.76 |
| 20 | 94.21 | 102.03 | 116.57 |
| 25 | 94.32 | 106.17 | 130.09 |
由表2可知,随着采样率的增大,智能监控系统的平均识别准确率、平均延迟及平均功耗均有所升高。以智能监控系统的平均功耗为首要指标,同时满足识别准确率大于90%的要求,最终选择以10,15,20 Hz作为任务处理策略的最佳采样率。
4 实例验证
图11
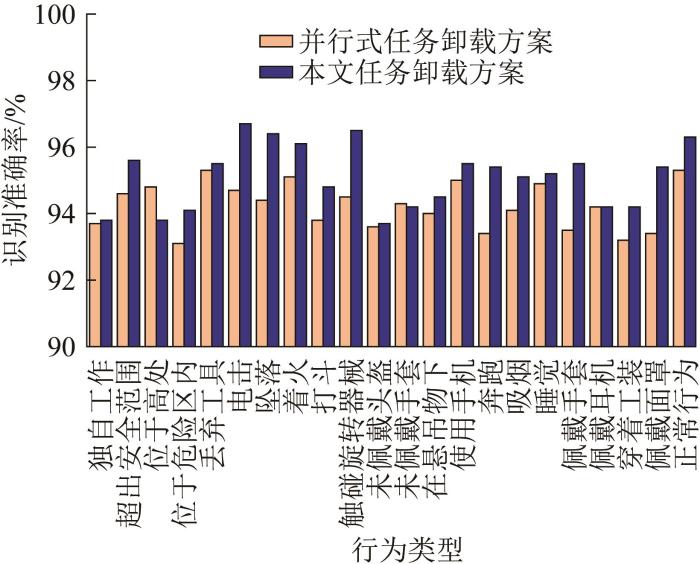
图11
智能监控系统的识别准确率对比
Fig.11
Comparison of identification accuracy of intelligent monitoring system
图12
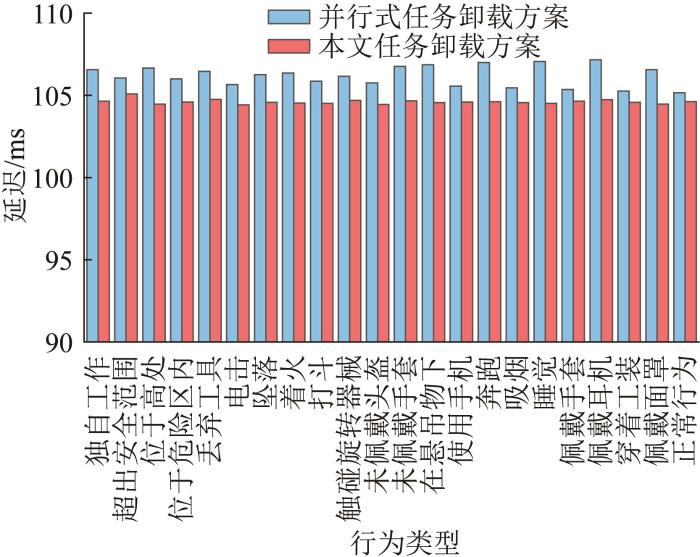
图13
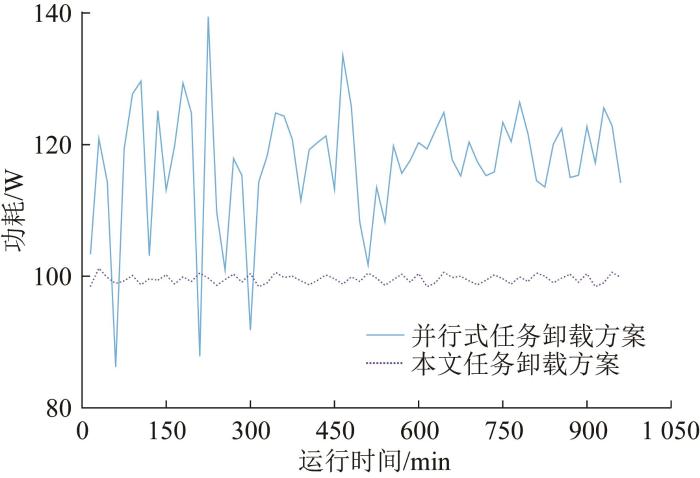
图13
智能监控系统的功耗对比
Fig.13
Comparison of power consumption of intelligent monitoring system
表3 智能监控系统的运行参数对比
Table 3
| 智能监控系统 | 平均识别准确率/% | 平均延迟/ms | 平均功耗/W | 功耗方差/W2 |
|---|---|---|---|---|
| 采用并行式任务卸载方案 | 94.32 | 106.17 | 116.57 | 145.32 |
| 采用本文任务卸载方案 | 94.82 | 104.51 | 99.70 | 0.434 5 |
测试结果表明,在同一生产线中,相较于采用并行式任务卸载方案的智能监控系统,采用基于场景人物数量的任务卸载方案的智能监控系统具有更为优异的性能,后者的平均识别准确率提高了0.53%,平均延迟缩短了1.56%,平均功耗降低了14.47%。结果表明,基于场景人物数量的任务卸载方案在云边协同智能监控系统中具有更好的适应性。
5 结 论
1)本文对复兴号动车组生产线的云边协同智能监控系统的识别准确率、延迟和功耗进行了测试。结果表明,不考虑场景变化对计算压力的影响,直接采用并行式任务卸载方案会导致边缘计算设备的计算资源无法得到充分利用,进而导致系统的运行稳定性和识别效果不佳。
2)本文提出了一种基于场景人物数量的任务卸载方案,通过轻量化DNN来实现工作场景中人物数量的识别并通过程序编写实现了基于场景人物数量的监控任务分类,同时通过对不同类型任务分配不同采样率的方式实现了计算资源的合理分配。
3)在现有复兴号动车组生产线的云边协同智能监控系统上对基于场景人物数量的任务卸载方案进行了测试。结果表明,添加基于场景人物数量的任务卸载方案后,智能监控系统的平均识别准确率提高了0.53%,平均延迟缩短了1.56%,平均功耗降低了14.47%,说明本文所提出的任务卸载方案在云边协同智能监控系统中具有较好的适应性。
参考文献
基于云边协同的智能数控车间自调控系统研究与实现
[J/OL].
Research and implementation of intelligent NC workshop self-regulation system based on cloud-edge collaboration
[J/OL].
Intelligent monitoring system with privacy preservation based on edge AI
[J].
CoEdge: exploiting the edge-cloud collaboration for faster deep learning
[J].
Research on edge computing and caching resource allocation mechanism for multi-view video
[C]//
Edge intelligence: on-demand deep learning model co-inference with device-edge synergy
[C]//
Real-time human detection as an edge service enabled by a lightweight CNN
[C]//
DeepIoT: compressing deep neural network structures for sensing systems with a compressor-critic framework
[C]//
多流融合的轻量级图卷积行为识别算法
[J].
Lightweight graph convolution action recognition algorithm based on multi-stream fusion
[J].
基于计算机视觉的复杂场景车牌识别算法
[J].
License plate recognition algorithm in complex scene based on computer vision
[J].
TokenPose: learning keypoint tokens for human pose estimation
[C]//
Learning IoT in edge: deep learning for the Internet of Things with edge computing
[J].
A new deep learning-based food recognition system for dietary assessment on an edge computing service infrastructure
[J].
Mainstream: dynamic stem-sharing for multi-tenant video processing
[C]//
Distributed deep neural networks over the cloud, the edge and end devices
[C]//
MoDNN: local distributed mobile computing system for deep neural network
[C]//Design,
DeepThings: distributed adaptive deep learning inference on resource-constrained IoT edge clusters
[J].
A cloud-edge collaboration framework for cognitive service
[J].
RMS: a delay sensitive road monitoring system using edge intelligence
[J].
Energy-efficient edge offloading in heterogeneous industrial IoT networks for factory of future
[J].
Sustainable offloading in mobile cloud computing
[J].
A first look at mobile intelligence: architecture, experimentation and challenges
[J].
Effective active skeleton representation for low latency human action recognition
[J].
Face recognition accuracy across demographics: shining a light into the problem
[C]//
Deep residual learning for image recognition
[C]//
Describing videos by exploiting temporal structure
[C]//

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}