更换托辊机器人履带式底盘的仿真与优化
Simulation and optimization of crawler chassis of idler replacement robot
更换托辊机器人履带式底盘的仿真与优化 |
| 田立勇,敖华,于宁,唐瑞 |
|
Simulation and optimization of crawler chassis of idler replacement robot |
| Liyong TIAN,Hua AO,Ning YU,Rui TANG |
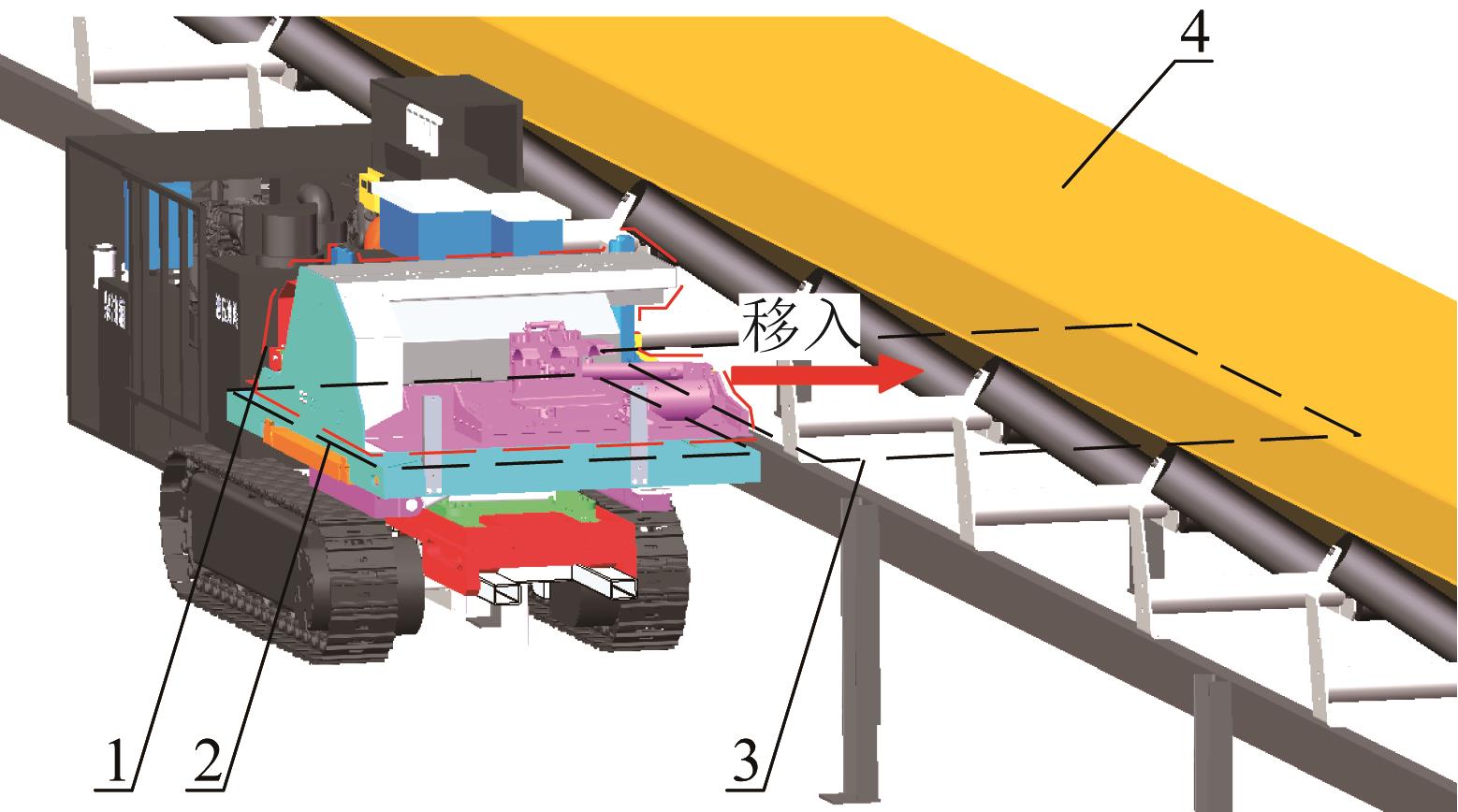
| 图6 姿态调整机构工作原理1—执行机构;2—执行机构底部平面;3—工作平面;4—带式输送机皮带。 |
| Fig.6 Working principle of attitude adjustment mechanism |
|
|