


本文链接:
风洞试验是飞行器和汽车研制过程中的核心环节,包括地面效应模拟、气动噪声模拟、环境气候模拟和流场显示模拟等[1]。其中地面效应模拟是风洞试验的首要任务,模拟结果用来指导飞行器和汽车的整体外形设计[2-3]。地面效应是指在飞行器起降或汽车行驶过程中,空气绕流受到地面的影响而与在自由大气中的流动空气产生差异,从而对飞行器/汽车产生附加的下压力或者升力,影响飞行器/汽车的操纵性和稳定性。因此,明确飞行器等在运行过程中的地面效应对其空气动力学的研究具有重要意义[4-8]。目前,固定地板模拟技术被广泛用于地面效应研究[9],但其应用时黏性空气流动产生的阻滞作用导致了附面层的产生,使得风洞模拟试验与真实情况严重不符;且因受到边界层及流场测量手段和测量精度的限制,无法明确边界层的流动影响机理。因此,消除静止地面的边界层成为当前研究地面效应的关键技术问题。移动带地板装置用与来流相同运动速度的环形活动带模拟地面效应,通过对近壁面低速流体的加速,来达到消除附面层的效果,是目前用于地面效应研究的理想装置[10-13]。
国外从20世纪六七十年代开始研制风洞移动带地板装置。俄罗斯T203风洞中的移动带地板装置研制于1967年,其由4幅移动带组合而成,每幅移动带都有独立的转动轮和相应的轴承;采用主从动轮两轮驱动结构,移动带工作面尺寸为3.0 m×2.4 m,速度为30~40 m/s。然而在当时,当移动带速度为40 m/s时,移动带寿命仅为几个小时,同时,带组合的方式极易导致带面跳动、偏移和打滑。1976年,德国航空航天中心与荷兰宇航研究院共同建造了DNW(German-Dutch wind tunnels,德国-荷兰风洞机构),其近几年研制的移动带地板的最大尺寸为7.6 m×6.3 m,移动带最大速度可达80 m/s,是世界上最大、最快的移动板之一[14-15]。2019年,美国学者Edirisinghe等[16]设计了一款用于测试赛车气动特性的移动带地板试验装置[16]。该移动带的材质为尼龙片基材料,整体为单电机驱动的三轮结构;选用张紧轮张紧纠偏方案,其驱动辊的腰鼓形设计能辅助移动带纠正偏移。同时,该装置配备了真空负压系统和冷却系统,用来确保装置稳定运行。国内针对移动带地板的研究起步较晚,现有水平与国外有很大差距。目前,我国已研制出以JF型号[17-18]和 FL型号[19]为首的多个大型风洞设备。2011年,李征初等[20]研制了应用在⌀3.2 m风洞中的移动带地板装置。该移动带的工作面尺寸为2.76 m×2.40 m,轮辊直径为240 mm,最高速度达50 m/s以上;运行框内部设有吸附腔,框体四周设有主电机和纠偏装置的安装机构,实现了装置的稳定运行。然而,目前国内移动带地板装置的尺寸较小,移动带边缘部分的流场不稳定,导致其工作面进一步减小,限制了诸多大型标准模型的研发。
基于此,作者对移动带地板装置进行了进一步研究。在保证移动带50 m/s以上运行速度的基础上,将移动带的工作面尺寸进一步扩大到4.0 m×3.4 m,并解决了尺寸增大导致的大长径比主从动辊的振动抑制、大幅面高速移动带的横向纠偏、高速移动带的冷却降温等多项技术难题,使得所研制的移动带地板装置成为国内自主研发的尺寸最大的地面效应模拟装备之一,从而可适应更多机型的研制,为进一步实现大型移动带地板装置的国产化提供研究基础。
作者首先给出了移动带地板装置的结构设计方案,并结合装置的特点,提出了分布式控制网络系统;通过有限元仿真和实验测试,对装置的驱动系统、纠偏系统和装置整体的性能进行分析,最终验证了移动带地板装置设计的合理性与可靠性。
1 移动带地板装置结构设计
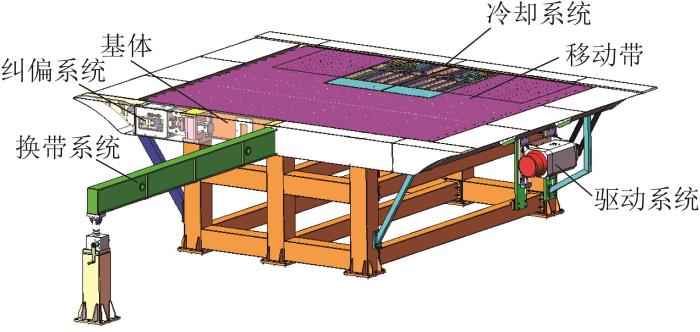
移动带地板装置主要由驱动系统、纠偏系统、冷却系统、换带系统及基体等组成,如图1所示。
图1
1.1 驱动系统结构设计
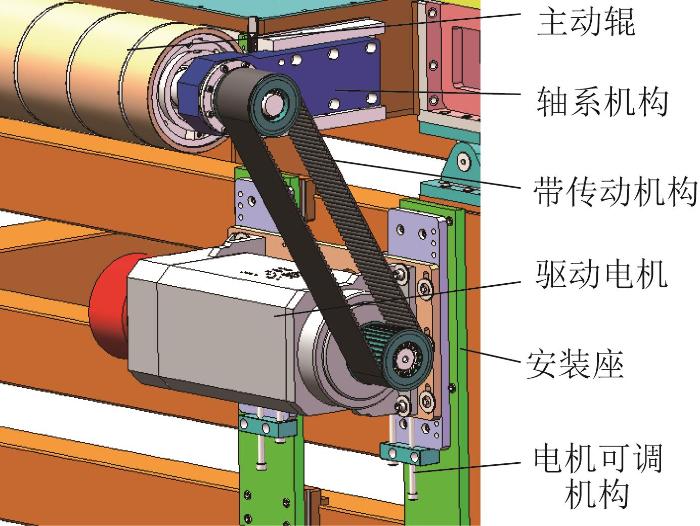
驱动系统的主要功能在于为整套装置提供动力源并传递动力。其主要由驱动电机、主从动辊、轴系机构、带传动机构、安装座和电机可调机构等组成,如图2所示。驱动电机提供动力,带传动机构将动力传递到主动辊,主从动辊通过张紧力带动移动带实现其高速运行。其中带传动机构由同步带轮和圆弧齿形带组成,齿形带传动能够有效减小高速传动中的转速下降。
图2
1.1.1 驱动电机
目前,国内外移动带地板装置驱动系统的动力源包括单电机和双电机两种。本研究选取单电机为动力源,其优势与先进性在于:1)可简化控制策略,不需要考虑高转速条件下双电机配速一致性的问题;2)电机安装与调整比较简易,避免了双电机安装平行度不足等带来的运行隐患。为了满足⌀4 m风洞的尺寸要求,将大尺寸驱动电机安装在移动带底部的底座上,尽量减小移动带地板装置的横向尺寸。在电机安装座上设有纵向可调机构,可以调节电机的纵向位姿,进而调节圆弧齿形带的张紧力以及电机轴与主动辊的平行度,实现驱动与传动部分的平稳运行。
1.1.2 主从动辊
移动带地板装置的主从动辊由外筒和芯轴组成。主从动辊的直径为320 mm,长度为3 430 mm,因此其长径比大于10∶1,导致常用于外筒内壁加工的镗床镗杆因刚度低而无法进行加工,同时,用于连接外筒与芯轴的焊接手段极易导致结构热变形,加剧外筒的动不平衡。作者创新性地提出了大长径比外筒分段加工的方案,并采用中间法兰加热过盈装配、两端胀紧套连接的方式实现外筒与芯轴的连接,如图3所示。此方案的优势在于:1)将外筒一分为二来减小其长径比,便于实现外筒内壁的精加工,减小主从动辊外筒的不平衡量;2)避免了由常规焊接方式导致的热变形,有利于主从动辊的动平衡。
图3
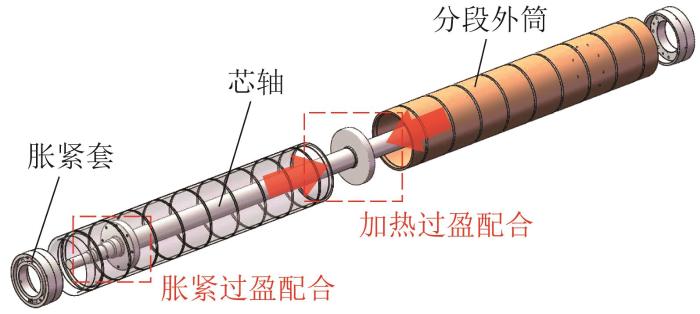
图3
大长径比主从动辊分段设计
Fig.3
Segmented design of master and slave rolls with large length-diameter ratio
1.2 纠偏系统结构设计
由于移动带存在加工误差且主从动辊的安装不可避免地存在不平行度,移动带在高速运行过程中会出现横向偏移问题。因此,作者设计了纠偏系统,如图4所示。
图4
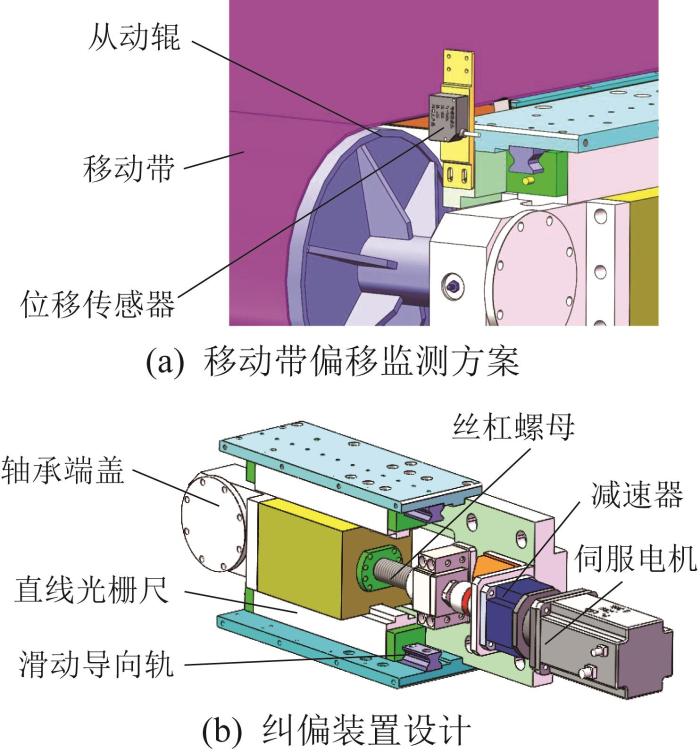
图4
移动带地板装置纠偏系统设计
Fig.4
Design of offset correction system of moving belt device
1.2.1 移动带偏移监测方案
移动带横向偏移量的监测是纠偏的前提。有研究者提出采用接触式推杆进行偏移量的测量[21],即移动带偏移时推动弹簧推杆从而获取偏移量。由于柔性移动带接触变形且推杆推动时易卡住,测量误差及不稳定性较大。作者提出了一种非接触式偏移量测量方法。采用激光位移传感器,将其光点横向照射在移动带侧面薄边,通过移动带偏移时光点的反射变化来获得偏移量。与推杆法相比,该方法的创新性在于:非接触式的测量方法避免了移动带在高速运行时的磨损、变形和振动,可大大提高偏移量测量的准确性和安全性;同时,为了防止在移动带高速运行时带面振动导致的光点丢失现象,将测量点位设在从动辊的张紧外圆上,在此点位移动带无跳动,可满足移动带偏移量监测要求。这种设计可以实现移动带偏移量的精准测量与反馈,为纠偏进给量、纠偏规律的分析提供重要参考。
1.2.2 纠偏装置设计
为了满足移动带高速运行时的精度调节要求,设计了基于快速伺服闭环控制的丝杠螺母纠偏装置。将伺服电机固定在基体上,通过丝杠螺母将电机的旋转运动转化为轴承座的直线运动;设计滑动导向轨以提供导向作用,从而推动从动轮一端完成纠偏。丝杠螺母的调节精度较高,也可提供适配移动带张力大小的驱动力。在调节过程中由直线光栅尺实时记录并反馈纠偏进给量,从而可逐步明确闭环纠偏的调整规律。
1.3 冷却系统结构设计
移动带在高速运行时的弯折以及摩擦使得其温度升高,会导致使用寿命缩短。因此,设计移动带冷却系统极其必要。
1.3.1 移动带温度监测方案
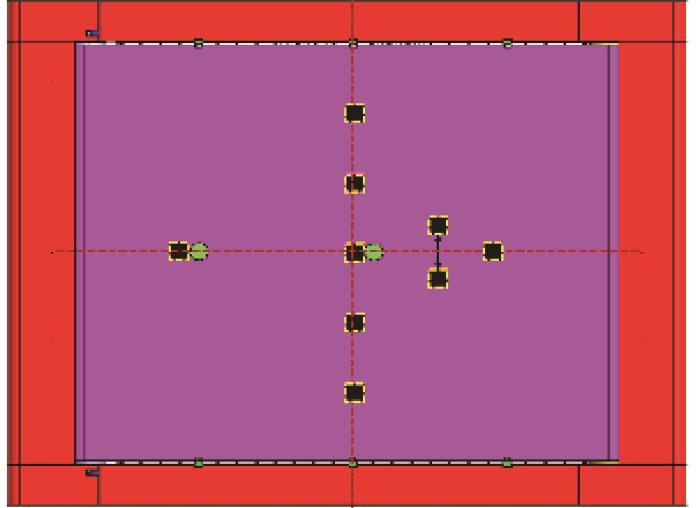
本研究以常规飞机模型为例,按照模型的尺寸与比例进行温度传感器的布置,如图5所示。将红外非接触式温度传感器内置在移动带地板装置的基体中,监测移动带与基体接触面的温度。该设计优点为:1)红外温度传感器比较贴近摩擦面,温度反馈较准确;2)温度传感器内置,避免了传感器外露导致的流场紊乱问题。
图5
1.3.2 冷却装置设计
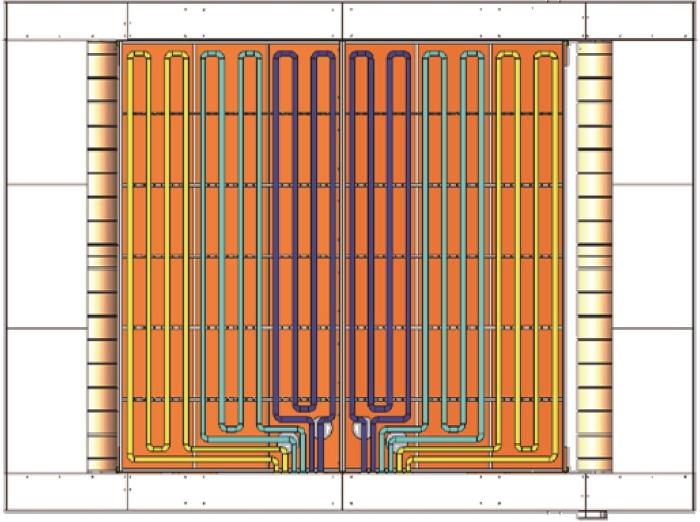
移动带的升温主要是由于移动带与基体上表面的剧烈摩擦。为了实现运行框和移动带同时降温,采用多路冷却盘路紧贴基体表面的布置方式,如图6所示。通过冷却机组的散热片对返回的高温冷却液进行降温,并通过循环泵循环利用。这种设计避免了气冷方式对风洞气流扰乱的问题,同时保证了移动带上表面的平整性,避免了移动带跳动对飞行器数据测试的影响。设计中将冷却盘路分为6路,这样不仅可以缩短冷却液的循环长度,减短冷却液冷却路径,提高冷却效率,而且可以充分利用循环泵的流量,加快循环速度。
图6
2 移动带地板装置控制系统设计
为了保证多系统集成的移动带地板装置的稳定运行,作者设计了装置的控制系统,如图7所示。其主要包括PLC(programmable logic controller,可编程逻辑控制器)主控单元、上位机和状态监测系统等。
图7
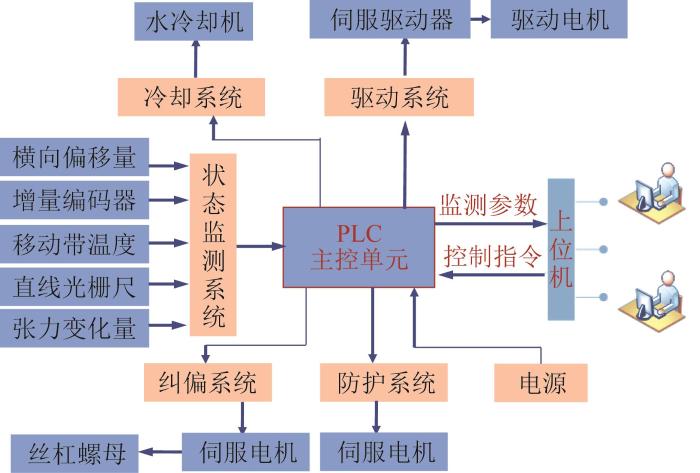
状态检测系统主要包括驱动系统、纠偏系统、冷却系统的检测数据传感器。移动带速度由电机驱动器的测速器测得;移动带的横向偏移量由激光位移传感器测得,纠偏位移量由直线光栅尺反馈;移动带温度由红外温度传感器测得。状态监测系统对上述模拟量进行监测,将监测信号传递到PLC主控单元,并显示在上位机上,便于控制人员及时获取装置的状态信息。
控制系统是一个分布式控制网络。上位机处于控制系统的最上层,实现对系统控制指令的下达、对系统运行状态的监控与显示等功能。它有2种控制模式:运行模式和设置模式。处于运行模式时,提供人机操作界面,显示装置运行时的移动带速度、温度、横向偏移等参数,以便操作者控制整个装置的启停运行;处于设置模式时,主要用于移动带预张紧力的设置和参数调节。PLC主控单元处于控制系统的下层,是实时控制的核心。其与驱动系统的伺服驱动器和编码器,张紧纠偏机构的张力传感器、直线光栅尺和位移传感器,冷却系统的温度传感器,共同构成了移动带地板装置的实时闭环控制系统。
具体地,在驱动控制系统中,当实时监测速度与设定速度不一致时,控制系统发送控制指令至驱动电机,使其达到设定转速;在纠偏控制系统中,当偏移量达到某设定值时,控制系统自动发送指令至纠偏伺服电机,使其根据监测到的偏移量不断调整纠偏量,直到皮带重新回到正常偏移范围内,而当偏移量超出位移传感器量程时,装置将急停;在冷却控制系统中,当移动带温度达到某设定值时,冷却机开始运行,使移动带温度保持在一定范围内,若在最大冷却效率下移动带温度仍超过设定范围,装置将减速及停机。
通过此控制系统和控制方法,保证了移动带地板装置各个系统的工作稳定性。在工控机监视和主控单元的控制下,整个装置得以稳定运行。
3 移动带地板装置性能分析
为了验证移动带地板装置各个系统设计的可行性,作者通过有限元仿真和实验测试,对装置各个系统和整体的运行情况进行分析。
3.1 驱动系统性能分析
3.1.1 主动辊仿真与验证
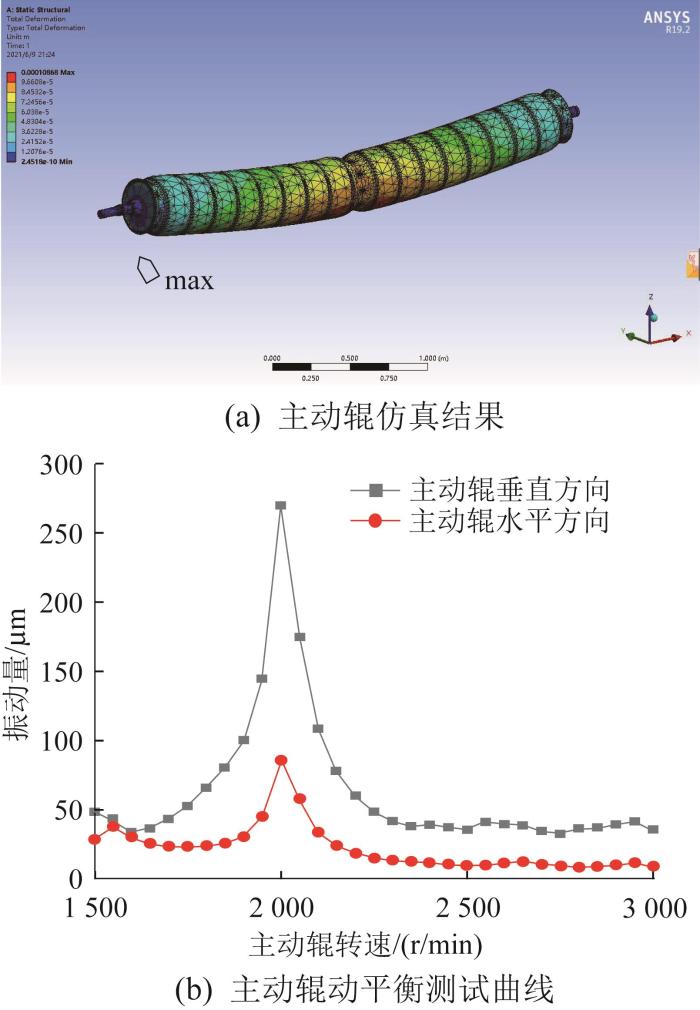
为了检验分段加工与装配的大长径比主从动辊的高速振动性能,本文以主动辊为例,采用有限元方法在ANSYS软件中对主动辊进行仿真。外部输入条件为主动辊重力以及3 000 r/min的高速。仿真结果如图8(a)所示。由图可知,主动辊的最大变形量为0.1 mm,出现在主动辊的中间部位,这符合挠性辊子的变形规律。同时,主动辊的固有频率为144 Hz,其临界转速远超驱动电机的转速范围。可见,外筒分段加工与装配的方案是合理的。
图8
3.1.2 主动辊动平衡测试
通过仿真验证后,对主动辊外筒进行分段加工与装配,并进行动平衡测试。通过监测主动辊水平和垂直方向的振动量,来分析其振动性能。通过测试得到主动辊动平衡曲线,如图8(b)所示。由图可知,在大部分转速下主动辊的振动量在0.1 mm以下;主动辊以2 000 r/min左右的高速运转时有一个共振点,共振频带较窄,对主动辊的使用影响较小。因此,动平衡测试结果也验证了分段加工方案的合理性。
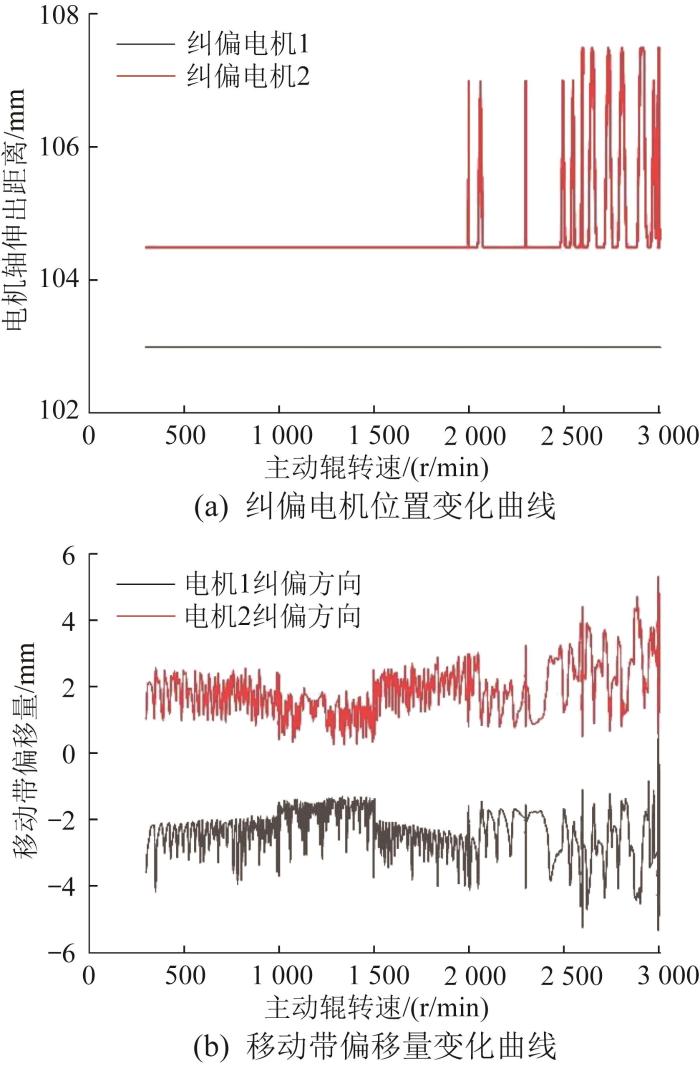
3.2 纠偏系统性能测试
为了验证装置纠偏系统的可行性,对纠偏电机的纠偏位移量和移动带偏移量进行了监测,结果如图9所示。其中,当纠偏电机1和2输出轴的伸出距离分别为103 mm和104.5 mm时,定为纠偏初始位置,由图9(a)可知,纠偏电机2不断产生纠偏动作,说明移动带存在向电机2纠偏方向偏移的趋势。直线光栅尺反馈的纠偏电机的纠偏位移量基本在3 mm以内,且大多出现在高速运转时,验证了纠偏系统的稳定性。由图9(b)可知:移动带不断向纠偏电机2的纠偏方向偏移,因此从纠偏电机2和1的方向测得的偏移量分别为正值和负值,且沿移动带未偏移时的位置对称分布;移动带偏移量在5 mm以内波动。测试结果验证了纠偏系统纠正移动带横向偏移的有效性。
图9
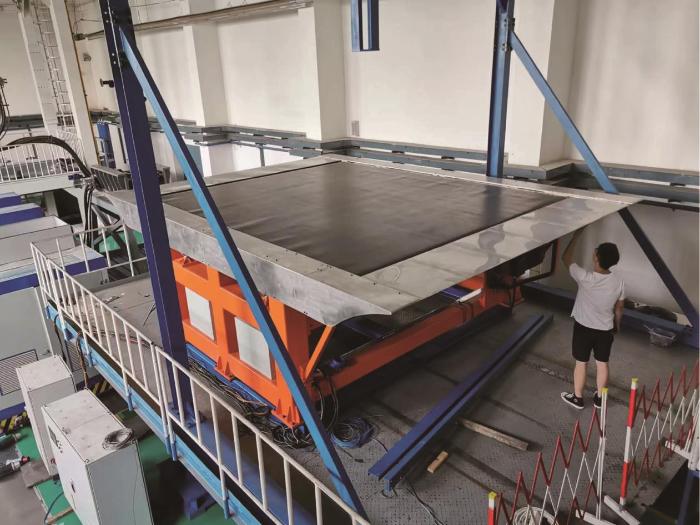
3.3 装置运行测试
移动带地板装置的实物图如图10所示。装置的正常运行需要多系统协调配合,为此进行了地面环境下移动带高速联调,并实时监测移动带带速误差以及装置的振动情况。
图10
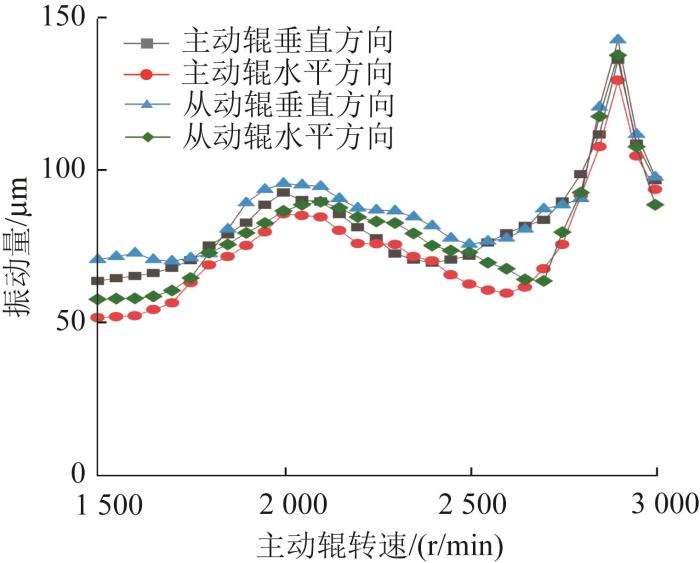
移动带地板装置的动平衡测试曲线如图11所示。由图可知:与单辊动平衡基本一致,装置的振动量基本保持在0.1 mm以下;2 900 r/min时的振动量稍微偏高,共振点基本消失。这主要是由于联调时移动带张紧后的弹性变形对主从动辊存在一定的吸振作用,使得装置整体的动平衡效果更加理想。测试中,使移动带平稳运行的最高转速可达3 250 r/min,主从动辊直径为320 mm,可得移动带上表面对应的线速度为54 m/s左右,且从动平衡与速度传感器的反馈转速来看,速度误差可以维持在0.25%左右,这说明所设计的移动带地板装置具有极高的可控性和平稳性。
图11
4 结 论
本文提出了一种4.0 m×3.4 m的大幅面高速移动带地板模拟装置。在保证现有国内装置高速性能的基础上,进一步扩大了移动带的幅面尺寸,使之成为目前国内自主研制的最大的地面效应模拟装备之一。当移动带上表面高速运行至与风洞来流风速一致时,可以模拟飞行器在起降过程中与地面空气的相对运动,从而准确模拟地面效应。本文进行了移动带地板装置的结构设计和控制系统设计,并通过仿真和实验进行了装置的性能分析。总结如下:
1)提出了大长径比主从动辊外筒分段加工的设计方案,实现了外筒内壁的精加工,并采用中间法兰加热过盈装配、两端胀紧套连接的方式实现外筒与芯轴的连接,避免了常规焊接手段引起的热变形,减小了高速下主从动辊的不平衡量。仿真和测试均显示,在3 000 r/min以下转速时主从动辊振动量可维持在0.1 mm左右。
2)设计了基于快速伺服闭环控制的丝杠螺母纠偏系统。采用激光位移传感器采集移动带偏移量,伺服电机带动丝杠螺母机构实现移动带的偏移调整。测试结果显示,纠偏位移量基本稳定在3 mm以内,移动带偏移量维持在5 mm以内,验证了纠偏系统纠正移动带横向偏移的有效性。
3)在装置的地面调试中,移动带上表面可稳定运行于54 m/s左右的速度,且带速误差保持在0.25%左右,此时振动量同样在0.1 mm左右,说明整个装置具有极高的可控性和稳定性。
未来,作者将致力于更大尺寸、更高速度的移动带地板装置的研制。
参考文献
地面结冰气象条件模拟控制技术研究
[J].
Research on ground freezing weather conditions simulating control technology
[J].DOI:10.3969/j.issn.1671-833X.2014.09.013 [本文引用: 1]
Impact of ground effect on airplane lateral directional stability during take-off and landing
[J].
A study on perception and reaction of ground effect during landing of large airplanes
[J].
Commuter aircraft aerodynamic characteristics through wind tunnel tests
[J].
地效对飞机气动特性的影响研究
[J].
The study of the ground effects on the aircraft aerodynamic characteristics
[J].
基于翼尖涡物理特征的诱导阻力减阻机制实验研究
[J].
Experimental study on drag-reduction mechanisms based on the physical characteristic of tip vortex
[J].
地面效应对汽车外部流动的影响
[J].
Numerical simulation study of ground effects on flow field around vehicle bodies
[J].
地面效应对飞机动稳定性的影响
[C/OL]//
The influence of ground effects on aircraft dynamic stability
[C/OL]//
Wind tunnel experiments with neutral and convective boundary layer stabilities
[J].
活动地板关键技术研究
[J].
Key technical research on developing moving belt ground proximity
[J].DOI:10.3969/j.issn.1672-9897.2008.04.015 [本文引用: 1]
“Reynolds Effect” and “Moving Ground Effect” tested in a quarter scale wind tunnel over a high speed moving belt
[J].
Wind tunnel tests on road vehicle models using a moving belt simulation of ground effect
[J].
Low speed wind tunnel moving ground test bed design
[J].
Final results from Mexnext-I: Analysis of detailed aerodynamic measurements on a 4.5 m diameter rotor placed in the large German Dutch wind tunnel DNW
[J].
DNW innovations in wind tunnel testing: New moving belt system for large low speed facility
[J].
On the mechanical design of the rolling road addition to the CSUF wind tunnel
[C]//
JF-12激波风洞在火星进入环境下的运行特性
[J].
Operating characteristics of JF-12 shock tunnel in Mars entry tests
[J].DOI:10.7527/S1000-6893.2020.24129 [本文引用: 1]
JF12长实验时间激波风洞10°尖锥气动力实验研究
[J].
Aerodynamic force measurements of 10° half-angle cone in JF12 long-test-time shock tunnel
[J].DOI:10.19527/j.cnki.2096-1642.2017.02.001 [本文引用: 1]
FL-61风洞壳体有限元分析与气压试验
[J].
FEM analysis and gas pressure intensity test of FL-61 wind tunnel
[J].
⌀3.2m风洞活动地板系统研制
[J].
Development of moving belt floor in ⌀3.2m wind tunnel
[J].
低速风洞活动地板关键技术研究
[D].
The research of the crucial technology for the moving belt ground plane in low speed wind tunnel
[D].DOI:10.2514/6.2008-3704 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}