雷达是获取海陆空战场全天候、全天时战略和战术情报的重要设备,是自动化指挥系统的首要视觉传感器,被广泛应用于军事、航空航海及气象预报等领域[1 ] 。雷达性能直接决定了雷达系统所能完成任务的类型及完成效果[2 ] 。探测距离和测距精度是雷达性能的核心指标,其在雷达工作过程中会受到传输波动和杂波干扰等因素的影响,导致雷达的探测能力下降,无法准确捕捉目标信息[3 ] 。因此,开展雷达系统探测距离和测距精度的分析,对雷达技术的发展及工程应用具有重要意义[4 ] 。
近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注。刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离。
不确定性会导致雷达探测距离和测距精度的准确性降低,从而造成雷达模型不可靠。使用受不确定性影响的雷达模型进行雷达性能评估,可能会产生致使决策失误的严重后果。分析不确定性对雷达探测距离和测距精度的影响规律,可以使雷达性能分析的结果更加准确与合理,从而可提高雷达性能分析的可靠性。
本文考虑雷达系统内外部不确定性因素,深入分析不确定性对雷达关键性能指标的影响规律。通过子区间分解方法对雷达性能进行分析,并将计算结果与蒙特卡洛模拟(Monte Carlo simulation,MCS)结果进行比较,来验证本文所提方法的有效性,以期为雷达性能分析提供一种高效准确的方法。
1 雷达探测距离和测距精度模型
近年来,雷达技术发展迅速,对探测距离、自卫干扰距离、检测概率、测距精度、角精度等性能参数的要求更加严格。其中探测距离是雷达的重要性能指标,而测距精度是表征雷达探测距离准确度的关键指标。为了精确量化雷达探测距离和测距精度,利用雷达方程建立探测距离方程和测距精度方程。
1.1 探测距离方程
探测距离指雷达在不受干扰的情况下能探测到目标的最远距离,可以表示为[4 ] :
R = P t ⋅ G t ⋅ G r ⋅ σ ⋅ λ 2 ⋅ τ 4 π 3 ⋅ k ⋅ T 0 ⋅ F n ⋅ L 1 4 (1)
式中:R 为探测距离;P t 为雷达发射功率;G t 、G r 分别为发射增益和接收增益;σ 为雷达截面积;λ 为波长,其与天线增益和天线有效孔径有关;τ 为脉冲宽度;k 为玻尔兹曼常数,k= 1.380 650 5 × 10 - 23 T 0 F n 为噪声系数;L 为综合损耗。
1.2 测距精度方程
测距精度指雷达探测距离的准确程度。对雷达探测距离的误差进行估计,可以表示为[4 ] :
R r e s = 3 ⋅ c 2 π ⋅ B n ⋅ 2 ⋅ R S N (2)
式中:R res 为测距精度;c 为光速,取c =3.0 × 10 8 B n R SN 为信噪比。
R S N = P r ⋅ B n ⋅ τ ⋅ n p N i + P j (3)
式中:n p 为脉冲积累数;P j N i 为噪声功率,N i = F n ⋅ k ⋅ T 0 ⋅ B n ⋅ G a G a 为接收机增益,即接收天线的等效增益;P r 为回波功率。
P r = P t ⋅ G t ⋅ G r ⋅ λ 2 ⋅ σ ⋅ G a 4 π 3 ⋅ R 4 ⋅ L (4)
2 雷达系统参数
2.1 雷达参数和干扰参数
雷达主要由发射机、天线、接收机及信号处理机组成。其中发射机产生雷达信号,天线用于收发信号,接收机捕获反射信号,信号处理机用于分析数据。
由于杂波影响,雷达发射和接收的信号与初始信号存在一定误差,同时信号在雷达内部传递的过程中存在损耗,导致雷达参数在一定范围内波动。将雷达参数和干扰参数设为区间变量,如表1 所示。在本文中,信号频率与干扰频率设置为相同数值。
2.2 雷达系统参数筛选
2.2.1 雷达系统性能区间度量模型的建立
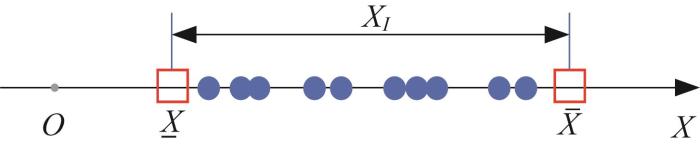
雷达系统存在雷达参数传输波动、信号干扰等不确定性因素,导致性能不稳定。已知雷达参数和干扰参数的数值区间,根据区间模型来度量雷达系统性能的不确定域。将影响雷达系统性能的不确定参数用区间进行量化,如图1 所示,可以表示为[22 ] :
X ∈ X I = X ̲ , X ¯ (5)
式中:I 表示区间,X ̲ X ¯ X ̲ < X ¯
图1
图1
影响雷达系统性能的不确定参数示意
Fig.1
Schematic of uncertain parameters affecting radar system performance
参数X 的不确定性通过其区间上界X ¯ X ̲ X 的中点和半径分别为X c 和X r ,可以表示为[22 ] :
X c = X ¯ + X ̲ 2 (6)
X r = X ¯ - X ̲ 2 (7)
X r 反映了X 的不确定性大小。X 可记为:X ∈ X I = X c - X r , X c + X r
雷达系统的输入参数维度高,且部分参数间的数量级存在明显差异,若不进行处理会导致计算结果不准确,从而使雷达探测距离和测距精度产生较大误差。因此,为了提高雷达系统性能分析的精度,将雷达系统参数归一化,即把参数转化到[0, 1]区间内,降低参数数量级对性能分析的影响。
假设区间参数U 的区间半径U r = 0.5 U c = 0.5 U ∈ U I = 0 , 1 X U
U = X - X ̲ 2 X r (8)
2.2.2 雷达性能参数筛选
采用摄动法对雷达探测距离和测距精度进行局部敏感性分析,以单个参数引起的性能变化来分析上述不确定参数是否对雷达性能产生影响。将雷达参数区间均分为10份,计算各节点处的雷达探测距离和测距精度响应值,并获得雷达探测距离和测距精度的影响参数。
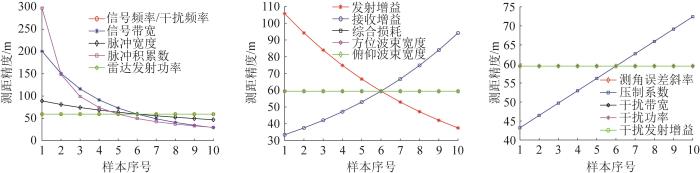
探测距离局部敏感性分析结果如图2 所示。由图可知:雷达探测距离随着信号频率/干扰频率、脉冲宽度、雷达发射功率、发射增益、接收增益和综合损耗的变化而改变,说明上述参数是探测距离的影响因数;随着信号带宽、脉冲积累数、方位波束宽度、俯仰波束宽度、测角误差斜率、压制系数及各干扰参数的变化,探测距离并无变化,说明上述参数对探测距离没有影响。
图2
图2
探测距离局部敏感性分析结果
Fig.2
Local sensitivity analysis results of detection distance
测距精度局部敏感性分析结果如图3 所示。由图可知:测距精度随着信号带宽、脉冲宽度、脉冲积累数、发射增益、接收增益和压制系数的变化而变化,说明上述参数是测距精度的影响因素;随着信号频率/干扰频率、雷达发射功率、综合损耗、方位波束宽度、俯仰波束宽度、测角误差斜率及各干扰参数的变化,测距精度并无变化,说明上述参数对测距精度没有影响。
图3
图3
测距精度局部敏感性分析结果
Fig.3
Local sensitivity analysis results of ranging accuracy
3 雷达性能参数全局敏感性分析
3.1 雷达性能响应面模型
随着雷达系统的复杂程度和性能要求的不断提高,其性能分析呈现变量多维、信息多源、分布多样等特点,导致基于高精度仿真模型的性能分析与计算的成本过高,难以应用。
多项式响应面模型具有收敛迅速的优点。将它应用于雷达性能分析中,可以有效提高性能分析的效率。其一般表达式为[23 ] :
f X = ∑ i = 1 n a i φ i X (9)
式中:f X n 为多项式基函数φ i X a i
不确定参数之间耦合性强,因此采用高阶多项式作为响应面模型,其表现形式为[23 ] :
f X = a 0 + ∑ i = 1 n a i X i + ∑ i = 1 n a i i X i 2 + ⋯ + ∑ i = 1 n a i ⋯ i ︸ n X i m + ∑ i j i < j n a i j X i X j (10)
式中:X i m 为多项式的阶数,在本文中取m =2;a 0 a i a i j aii 、a i ⋯ i ︸ n n +1)(n +2)/2]+2n 次计算。
通过观测值与模型预测值之间的复相关系数R 2 E RMS [24 ] 来判断响应面模型在雷达性能分析中的准确性。
R 2 = 1 - ∑ i = 1 n y i - y ˜ i 2 ∑ i = 1 n y i - y ¯ i 2 (11)
E R M S = 1 n y ¯ i ∑ i = 1 n y i - y ˜ i 2 (12)
式中:y i y ˜ i y ¯ i
R 2 E RMS 的绝对值越小,表明响应面模型的拟合精度越高。
探测距离和测距精度响应面模型的精度验证结果如表2 所示,可见响应面模型具有较高的精度。
3.2 探测距离和探测距离全局敏感性分析
采用Sobol'全局敏感性分析方法获取雷达探测距离和测距精度影响参数的重要性排序。通过计算单个参数和参数组合的偏方差对总方差的影响来分析参数的重要程度。
假设雷达模型Y = g X = g X 1 , X 2 , ⋯ , X n X i [25 ] :
Y = g 0 + ∑ i = 1 n g i X i + ∑ 1 ≤ i ≤ j ≤ n n g i j X i , X j + ⋯ + g 1 , 2 , ⋯ , n X 1 , X 2 , ⋯ , X n (13)
式中:g 0 X = X 1 , X 2 , ⋯ , X n n 维相互独立的输入参数,所有子项两两正交。
V = ∫ g 2 X d X - g 0 2 (14)
单个参数的偏方差V i V i 1 , … , i s [25 ] :
V i = ∫ g i 2 X i d X i (15)
V i 1 , … , i s = ∫ 0 1 ⋯ ∫ 0 1 g i 1 , … , i s 2 X 1 , … , X s d X i 1 ⋯ d X i s (16)
总方差V 表示所有参数对系统输出的影响;偏方差V i V i 1 , … , i s S i 1 , … , i s [25 ] :
S i 1 , … , i s = V i 1 , … , i s V (17)
∑ i = 1 n S i + ∑ i = 1 n ∑ j = i + 1 n S i , j + … + S 1 , 2 , … , n = 1 (18)
本文只考虑雷达系统模型的主效应指标,即单个参数对性能的影响程度,表示为[26 ] :
S i = V i V (19)
探测距离和测距精度全局敏感性分析结果分别如表3 和表4 所示。
由表3 可知,参数对探测距离的影响程度从大到小依次为信号频率/干扰频率、雷达发射功率、接收增益、综合损耗、发射增益、脉冲宽度。
由表4 可知,参数对测距精度的影响程度从大到小依次为脉冲积累数、信号带宽、接收增益、发射增益、脉冲宽度、压制系数。
4 雷达性能分析
经过雷达性能参数全局敏感性分析后,得到了雷达探测距离和测距精度的主要影响参数。对雷达探测距离和测距精度进行分析,获取其不确定域。分析流程如图4 所示。
图4
图4
雷达探测距离和测距精度分析流程图
Fig.4
Analysis flowchart of radar detection distance and ranging accuracy
4.1 子区间分解分析方法
为了提高雷达性能分析效率,本文采用子区间分解分析方法,用响应面模型代替真实性能模型进行分析。子区间分解分析方法(subinterval decomposition analysis method,SDAM)[27 -28 ] 将具有多维区间参数的原雷达系统分解为多个一维子系统,将每个子系统的不确定参数划分为几个不确定度较小的子区间,通过少数子区间的组合分析来近似计算雷达探测距离和测距精度的上界及下界。
将雷达探测距离和测距精度的响应面模型在区间中点处展开,可以得到[27 ] :
f X = f X c + G T X c δ X + 1 2 δ X T H T X c δ X (20)
式中:G T H T
G T = ∂ f ∂ X 1 ∂ f ∂ X 2 ⋯ ∂ f ∂ X n (21)
H T = ∂ 2 f ∂ 2 X 1 ∂ 2 f ∂ X 1 ∂ X 2 ⋯ ∂ 2 f ∂ X 1 ∂ X n ∂ 2 f ∂ X 2 ∂ X 1 ∂ 2 f ∂ 2 X 2 ⋯ ∂ 2 f ∂ X 2 ∂ X n ⋮ ⋮ ⋮ ∂ 2 f ∂ X n ∂ X 1 ∂ 2 f ∂ X n ∂ X 2 ⋯ ∂ 2 f ∂ 2 X n (22)
将式(13)中的参数分别在每个参数X 1 , X 2 , ⋯ , X n 式(20)可以求得雷达探测距离和测距精度的上界及下界,其数学模型可进一步表示为[27 ] :
f X = f X 1 , X c 2 , … , X c n + f X c 1 , X 2 , … , X c n + ⋯ + f X c 1 , X c 2 , … , X n - n - 1 f X c (23)
雷达探测距离和测距精度子区间分解分析的主要步骤如下。
步骤1:将探测距离和测距精度的主要影响参数的区间划分为N 个子区间;
步骤2:将参数分别在其区间中点处展开,并代替初始的响应面模型;
步骤3:通过公式(23)计算每个子区间节点的探测距离和测距精度响应;
步骤4:将步骤3中获取的雷达探测距离和测距精度进行比较,取其中最大值为区间上界,最小值为区间下界,从而获得雷达探测距离和测距精度的数值区间,完成雷达性能不确定性分析。
取N= 3,4,5,得到不同子区间下雷达探测距离和测距精度区间,如表5 所示。通过MCS获取的雷达探测距离区间为[167 273, 725 512] m,测距精度区间为[4.91, 1 682.76] m,可见当N =3时通过SDAM算得的区间比MCS得到的大。当N =4与N =5时,得到的探测距离和测距精度区间相同,因此取N =4。
4.2 雷达性能分析结果比较
考虑不确定性可以使雷达探测距离和测距精度的分析结果更加准确与合理,并且基于子区间的雷达性能分析可以实现系统性能与成本的最优平衡。采用MCS方法需要10万个样本,而采用本文方法仅需2 000个样本。不同方法下雷达性能不确定性分析结果如表6 所示。表中,ε 为误差,ε = f X - f ˜ X / f ˜ X × 100 % f X f ˜ X
由表6 可知,采用SDAM与MCS方法得到的探测距离区间之间的误差小于2%,测距精度区间之间的误差小于0.2%,表明本文方法可以有效计算雷达探测距离和测距精度的波动范围。
5 结 论
本文考虑了影响雷达探测距离和测距精度的不确定性,采用基于子区间的性能分析方法探究了不确定性的影响机制。主要结论如下:
1)采用本文方法可以准确获得雷达探测距离和测距精度的区间上下界,提高了雷达探测的可靠性。
2)通过敏感性分析获得了雷达性能主要影响参数的敏感度。对探测距离影响最大的参数是信号频率/干扰频率,对测距精度影响最大的参数是脉冲积累数,这为降低雷达性能分析与计算成本提供了参考。
3)基于子区间的雷达性能分析方法相比于MCS方法,所需样本数减少了2个数量级,雷达性能分析效率得到提升。本研究为雷达性能不确定性分析提供了一种可行的研究思路。
参考文献
View Option
[3]
LI Y ZHAO W A correction method for radar detection range analysis in interference environment
[C]//ITM Web of Conferences , León, Guanajuato, Oct. 5 -7 , 2022 .
[本文引用: 1]
[4]
MAHAFZA B R Radar systems analysis and design using matlab [M]. Boca Raton : CRC Press , 2021 .
[本文引用: 3]
[5]
刘育才 ,马晓静 ,雷红 “本土链”雷达主要性能分析及启示
[J].火控雷达技术 ,2022 ,51 (4 ):47 -52 .
[本文引用: 1]
LIU Y C MA X J LEI H The main performance analysis and enlightenment of the CH radar
[J]. Fire Control Radar Technology , 2022 , 51 (4 ): 47 -52 .
[本文引用: 1]
[6]
DONG B LI G WANG K et al Range aliasing elimination for FMICW radar with uniform sampling bursts and poisson disk inter-burst delays
[J]. IEEE Sensors Journal , 2022 , 22 (2 ): 1495 -1508 .
[本文引用: 1]
[8]
CHANG H Y CHEN Y Y CHUNG W H RangeSRN: range super-resolution network using mmwave FMCW radar
[C]//2022 IEEE Global Communications Conference , Rio de Janeiro, Dec . 4 -8 , 2022 .
[本文引用: 1]
[10]
ZHAO M X ZHANG X YANG Q et al Using sky-wave echoes information to extend HFSWR's maximum detection range
[J]. Radio Science , 2018 , 53 (8 ): 922 -932 .
[本文引用: 3]
[11]
董云龙 ,刘洋 ,刘宁波 ,等 基于雷达方程修正的目标探测距离评估方法
[J].信号处理 ,2022 ,38 (10 ):2102 -2113 .
[本文引用: 1]
DONG Y L LIU Y LIU N B et al A method for evaluating target detection range based on radar range equation modification
[J]. Journal of Signal Processing , 2022 , 38 (10 ): 2102 -2113 .
[本文引用: 1]
[12]
汤华涛 ,察豪 ,田斌 ,等 微波超视距雷达组网探测范围研究
[J].电波科学学报 ,2022 ,37 (2 ):274 -278 . doi:10.12265/j.cjors.2021114
DOI:10.12265/j.cjors.2021114
[本文引用: 1]
TANG H T CHA H , TIAN B et al Study on detection range of microwave over-the-horizon radar network
[J]. Chinese Journal of Radio Science , 2022 , 37 (2 ): 274 -278 .
DOI:10.12265/j.cjors.2021114
[本文引用: 1]
[14]
马兰 ,李照照 ,杨雪林 ,等 基于高斯插值提高雷达测距精度的研究
[J].火控雷达技术 ,2021 ,50 (1 ):41 -47 .
[本文引用: 1]
MA L LI Z Z YANG X L et al Improving radar ranging accuracy based on Gaussian interpolation
[J]. Fire Control Radar Technology , 2021 , 50 (1 ): 41 -47 .
[本文引用: 1]
[15]
MAROM H BAR S Y MILGROM B Bistatic radar tracking with significantly improved bistatic range accuracy
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2023 , 59 (1 ): 52 -62 .
[本文引用: 1]
[17]
SIM J Y YANG J R Frequency discrimination method using asymmetric transmission time in FSK radar
[J]. Journal of Electromagnetic Engineering and Science , 2022 , 22 (4 ): 496 -501 .
[本文引用: 1]
[18]
XU Z QI S ZHANG P A coherent CZT-based algorithm for high-accuracy ranging with FMCW radar
[J]. IEEE Transactions on Instrumentation and Measurement , 2023 , 72 : 1 -11 .
[本文引用: 1]
[20]
李妍 ,陈超 ,程光权 ,等 面向不确定性数据的雷达预警建模方法研究
[J].郑州大学学报(理学版) ,2022 ,54 (5 ): 37 -42 .
[本文引用: 1]
LI Y CHEN C CHENG G Q et al Research on radar warning modelling methods for uncertainty-oriented data
[J]. Journal of Zhengzhou University (Natural Science Edition) , 2022 , 54 (5 ): 37 -42 .
[本文引用: 1]
[22]
OUYANG H LIU J HAN X et al Correlation propagation for uncertainty analysis of structures based on a non-probabilistic ellipsoidal model
[J]. Applied Mathematical Modelling , 2020 , 88 : 190 -207 .
[本文引用: 2]
[24]
胡长明 ,操卫忠 ,孙为民 ,等 基于代理模型的车载雷达阵面风载疲劳分析
[J].强度与环境 ,2020 ,47 (4 ):45 -51 .
[本文引用: 1]
HU C M CAO W Z SUN W M et al Fatigue analysis of vehicle radar under wind load based on surrogate models
[J]. Structure & Environment Engineering , 2020 , 47 (4 ): 45 -51 .
[本文引用: 1]
[25]
SOBOL I M Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates
[J]. Mathematics and Computers in Simulation , 2001 , 55 (1/3 ): 271 -280 .
[本文引用: 4]
[26]
张扬 多参数非线性系统全局敏感性分析与动态代理模型研究
[D].长沙 :湖南大学 ,2014 .
[本文引用: 2]
ZHANG Y The study on global sensitivity analysis and dynamic metamodel
[D]. Changsha : Hunan University , 2014 .
[本文引用: 2]
[27]
OUYANG H LIU J HAN X et al Non-probabilistic uncertain inverse problem method considering correlations for structural parameter identification
[J]. Structural and Multidisciplinary Optimization , 2021 , 64 (3 ): 1327 -1342 .
[本文引用: 3]
[28]
FU C M CAO L X TANG J C et al A subinterval decomposition analysis method for uncertain structures with large uncertainty parameters
[J]. Computers & Structures , 2018 , 197 : 58 -69 .
[本文引用: 1]
“雷达信号处理”专刊序言
3
2016
... 雷达是获取海陆空战场全天候、全天时战略和战术情报的重要设备,是自动化指挥系统的首要视觉传感器,被广泛应用于军事、航空航海及气象预报等领域[1 ] .雷达性能直接决定了雷达系统所能完成任务的类型及完成效果[2 ] .探测距离和测距精度是雷达性能的核心指标,其在雷达工作过程中会受到传输波动和杂波干扰等因素的影响,导致雷达的探测能力下降,无法准确捕捉目标信息[3 ] .因此,开展雷达系统探测距离和测距精度的分析,对雷达技术的发展及工程应用具有重要意义[4 ] . ...
... Radar parameters and interference parameters
Table 1 参数 单位 数值区间 信号频率 108 Hz [3.0, 10.0] 信号带宽 105 Hz [5.0, 10.0] 脉冲宽度 10-3 s [1.0, 2.0] 脉冲积累数 个 [1 , 10 ] 雷达发射功率 105 W [1.0, 5.0] 发射增益 dB [35.0, 40.0] 接收增益 dB [35.0, 40.0] 综合损耗 dB [40.0, 45.0] 方位波束宽度 (°) [2.0, 3.0] 俯仰波束宽度 (°) [2.0, 3.0] 测角误差斜率 [40.0, 70.0] 压制系数 [40.0, 70.0] 干扰频率 108 Hz [3.0, 10.0] 干扰带宽 Hz [3.0, 7.0] 干扰功率 103 W [3.0, 7.0] 干扰发射增益 dB [10.0, 20.0]
<strong>2.2</strong> 雷达系统参数筛选 2.2.1 雷达系统性能区间度量模型的建立 雷达系统存在雷达参数传输波动、信号干扰等不确定性因素,导致性能不稳定.已知雷达参数和干扰参数的数值区间,根据区间模型来度量雷达系统性能的不确定域.将影响雷达系统性能的不确定参数用区间进行量化,如图1 所示,可以表示为[22 ] : ...
... Global sensitivity analysis results of ranging accuracy
Table 4 影响参数 单位 数值区间 敏感度 信号带宽 105 Hz [5.0, 10.0] 0.242 3 脉冲宽度 10-3 s [1.0, 2.0] 0.020 6 脉冲积累数 个 [1 , 10 ] 0.404 1 发射增益 dB [35.0, 40.0] 0.070 4 接收增益 dB [35.0, 40.0] 0.071 0 压制系数 dB [40.0, 70.0] 0.013 0
由表3 可知,参数对探测距离的影响程度从大到小依次为信号频率/干扰频率、雷达发射功率、接收增益、综合损耗、发射增益、脉冲宽度. ...
“雷达信号处理”专刊序言
3
2016
... 雷达是获取海陆空战场全天候、全天时战略和战术情报的重要设备,是自动化指挥系统的首要视觉传感器,被广泛应用于军事、航空航海及气象预报等领域[1 ] .雷达性能直接决定了雷达系统所能完成任务的类型及完成效果[2 ] .探测距离和测距精度是雷达性能的核心指标,其在雷达工作过程中会受到传输波动和杂波干扰等因素的影响,导致雷达的探测能力下降,无法准确捕捉目标信息[3 ] .因此,开展雷达系统探测距离和测距精度的分析,对雷达技术的发展及工程应用具有重要意义[4 ] . ...
... Radar parameters and interference parameters
Table 1 参数 单位 数值区间 信号频率 108 Hz [3.0, 10.0] 信号带宽 105 Hz [5.0, 10.0] 脉冲宽度 10-3 s [1.0, 2.0] 脉冲积累数 个 [1 , 10 ] 雷达发射功率 105 W [1.0, 5.0] 发射增益 dB [35.0, 40.0] 接收增益 dB [35.0, 40.0] 综合损耗 dB [40.0, 45.0] 方位波束宽度 (°) [2.0, 3.0] 俯仰波束宽度 (°) [2.0, 3.0] 测角误差斜率 [40.0, 70.0] 压制系数 [40.0, 70.0] 干扰频率 108 Hz [3.0, 10.0] 干扰带宽 Hz [3.0, 7.0] 干扰功率 103 W [3.0, 7.0] 干扰发射增益 dB [10.0, 20.0]
<strong>2.2</strong> 雷达系统参数筛选 2.2.1 雷达系统性能区间度量模型的建立 雷达系统存在雷达参数传输波动、信号干扰等不确定性因素,导致性能不稳定.已知雷达参数和干扰参数的数值区间,根据区间模型来度量雷达系统性能的不确定域.将影响雷达系统性能的不确定参数用区间进行量化,如图1 所示,可以表示为[22 ] : ...
... Global sensitivity analysis results of ranging accuracy
Table 4 影响参数 单位 数值区间 敏感度 信号带宽 105 Hz [5.0, 10.0] 0.242 3 脉冲宽度 10-3 s [1.0, 2.0] 0.020 6 脉冲积累数 个 [1 , 10 ] 0.404 1 发射增益 dB [35.0, 40.0] 0.070 4 接收增益 dB [35.0, 40.0] 0.071 0 压制系数 dB [40.0, 70.0] 0.013 0
由表3 可知,参数对探测距离的影响程度从大到小依次为信号频率/干扰频率、雷达发射功率、接收增益、综合损耗、发射增益、脉冲宽度. ...
认知雷达系统技术发展综述
1
2018
... 雷达是获取海陆空战场全天候、全天时战略和战术情报的重要设备,是自动化指挥系统的首要视觉传感器,被广泛应用于军事、航空航海及气象预报等领域[1 ] .雷达性能直接决定了雷达系统所能完成任务的类型及完成效果[2 ] .探测距离和测距精度是雷达性能的核心指标,其在雷达工作过程中会受到传输波动和杂波干扰等因素的影响,导致雷达的探测能力下降,无法准确捕捉目标信息[3 ] .因此,开展雷达系统探测距离和测距精度的分析,对雷达技术的发展及工程应用具有重要意义[4 ] . ...
认知雷达系统技术发展综述
1
2018
... 雷达是获取海陆空战场全天候、全天时战略和战术情报的重要设备,是自动化指挥系统的首要视觉传感器,被广泛应用于军事、航空航海及气象预报等领域[1 ] .雷达性能直接决定了雷达系统所能完成任务的类型及完成效果[2 ] .探测距离和测距精度是雷达性能的核心指标,其在雷达工作过程中会受到传输波动和杂波干扰等因素的影响,导致雷达的探测能力下降,无法准确捕捉目标信息[3 ] .因此,开展雷达系统探测距离和测距精度的分析,对雷达技术的发展及工程应用具有重要意义[4 ] . ...
A correction method for radar detection range analysis in interference environment
1
7
... 雷达是获取海陆空战场全天候、全天时战略和战术情报的重要设备,是自动化指挥系统的首要视觉传感器,被广泛应用于军事、航空航海及气象预报等领域[1 ] .雷达性能直接决定了雷达系统所能完成任务的类型及完成效果[2 ] .探测距离和测距精度是雷达性能的核心指标,其在雷达工作过程中会受到传输波动和杂波干扰等因素的影响,导致雷达的探测能力下降,无法准确捕捉目标信息[3 ] .因此,开展雷达系统探测距离和测距精度的分析,对雷达技术的发展及工程应用具有重要意义[4 ] . ...
3
2021
... 雷达是获取海陆空战场全天候、全天时战略和战术情报的重要设备,是自动化指挥系统的首要视觉传感器,被广泛应用于军事、航空航海及气象预报等领域[1 ] .雷达性能直接决定了雷达系统所能完成任务的类型及完成效果[2 ] .探测距离和测距精度是雷达性能的核心指标,其在雷达工作过程中会受到传输波动和杂波干扰等因素的影响,导致雷达的探测能力下降,无法准确捕捉目标信息[3 ] .因此,开展雷达系统探测距离和测距精度的分析,对雷达技术的发展及工程应用具有重要意义[4 ] . ...
... 探测距离指雷达在不受干扰的情况下能探测到目标的最远距离,可以表示为[4 ] : ...
... 测距精度指雷达探测距离的准确程度.对雷达探测距离的误差进行估计,可以表示为[4 ] : ...
“本土链”雷达主要性能分析及启示
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
“本土链”雷达主要性能分析及启示
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
Range aliasing elimination for FMICW radar with uniform sampling bursts and poisson disk inter-burst delays
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
车载激光雷达关键性能参数及决定因素
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
车载激光雷达关键性能参数及决定因素
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
RangeSRN: range super-resolution network using mmwave FMCW radar
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
低空小型无人机雷达探测距离仿真分析
1
2018
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
低空小型无人机雷达探测距离仿真分析
1
2018
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
Using sky-wave echoes information to extend HFSWR's maximum detection range
3
2018
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
... Radar parameters and interference parameters
Table 1 参数 单位 数值区间 信号频率 108 Hz [3.0, 10.0] 信号带宽 105 Hz [5.0, 10.0] 脉冲宽度 10-3 s [1.0, 2.0] 脉冲积累数 个 [1 , 10 ] 雷达发射功率 105 W [1.0, 5.0] 发射增益 dB [35.0, 40.0] 接收增益 dB [35.0, 40.0] 综合损耗 dB [40.0, 45.0] 方位波束宽度 (°) [2.0, 3.0] 俯仰波束宽度 (°) [2.0, 3.0] 测角误差斜率 [40.0, 70.0] 压制系数 [40.0, 70.0] 干扰频率 108 Hz [3.0, 10.0] 干扰带宽 Hz [3.0, 7.0] 干扰功率 103 W [3.0, 7.0] 干扰发射增益 dB [10.0, 20.0]
<strong>2.2</strong> 雷达系统参数筛选 2.2.1 雷达系统性能区间度量模型的建立 雷达系统存在雷达参数传输波动、信号干扰等不确定性因素,导致性能不稳定.已知雷达参数和干扰参数的数值区间,根据区间模型来度量雷达系统性能的不确定域.将影响雷达系统性能的不确定参数用区间进行量化,如图1 所示,可以表示为[22 ] : ...
... Global sensitivity analysis results of ranging accuracy
Table 4 影响参数 单位 数值区间 敏感度 信号带宽 105 Hz [5.0, 10.0] 0.242 3 脉冲宽度 10-3 s [1.0, 2.0] 0.020 6 脉冲积累数 个 [1 , 10 ] 0.404 1 发射增益 dB [35.0, 40.0] 0.070 4 接收增益 dB [35.0, 40.0] 0.071 0 压制系数 dB [40.0, 70.0] 0.013 0
由表3 可知,参数对探测距离的影响程度从大到小依次为信号频率/干扰频率、雷达发射功率、接收增益、综合损耗、发射增益、脉冲宽度. ...
基于雷达方程修正的目标探测距离评估方法
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
基于雷达方程修正的目标探测距离评估方法
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
微波超视距雷达组网探测范围研究
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
微波超视距雷达组网探测范围研究
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
雷达实际探测威力快速生成算法研究
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
雷达实际探测威力快速生成算法研究
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
基于高斯插值提高雷达测距精度的研究
1
2021
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
基于高斯插值提高雷达测距精度的研究
1
2021
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
Bistatic radar tracking with significantly improved bistatic range accuracy
1
2023
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
提高FMCW雷达测距精度的算法研究
1
2016
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
提高FMCW雷达测距精度的算法研究
1
2016
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
Frequency discrimination method using asymmetric transmission time in FSK radar
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
A coherent CZT-based algorithm for high-accuracy ranging with FMCW radar
1
2023
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
光子雷达探测性能与测距精度的理论研究
1
2014
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
光子雷达探测性能与测距精度的理论研究
1
2014
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
面向不确定性数据的雷达预警建模方法研究
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
面向不确定性数据的雷达预警建模方法研究
1
2022
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
雷达探测距离估计的非概率区间方法
1
2008
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
雷达探测距离估计的非概率区间方法
1
2008
... 近年来,有关雷达探测距离和测距精度提升的研究受到了国内外学者的广泛关注.刘育才等[5 ] 通过雷达方程获取了“本土链”雷达的探测距离,并提出了反干扰、抗摧毁等雷达未来发展方向;Dong等[6 ] 提出了一种基于泊松盘抽样和迭代软阈值算法的消除调频连续波雷达距离混叠的方法,在消除距离混叠的同时增大了探测距离,提高了雷达的多目标探测能力;曹丽等[7 ] 归纳了车载激光雷达探测距离的关键参数及决定因素,为雷达性能分析效率的提高奠定了基础;Chang等[8 ] 提出了一种超分辨率网络,在有限带宽下保证了最大可探测距离;李琴等[9 ] 采用地杂波动目标显示抑制技术,有效增大了低空小型无人机雷达的探测距离,为检测低小、较慢目标的地基雷达的设计提供了参考;Zhao等[10 ] 提出了一种远程目标探测距离模糊的解决方法,增强了雷达远距离探测能力;董云龙等[11 ] 根据海杂波对目标探测的影响,将一般雷达方程简化为信噪比方程,提高了探测距离的计算效率;汤华涛等[12 ] 在蒸发波导条件下建立了雷达组网探测范围的评估模型,扩大了在目标运动姿态未知情况下的探测范围;针对实际探测距离的计算须根据约束条件的变化不断调整的问题,陈超凡等[13 ] 提出了一种雷达实际探测威力快速生成算法,有效提高了探测距离的计算速度;马兰等[14 ] 通过高斯插值处理方法预估脉压波峰值出现的时间,减小了预估脉压波峰值与真实脉压波峰值之间的误差,有效提高了测距精度;Marom等[15 ] 提出了在测量坐标系中使用滤波器并将测量结果转换到笛卡尔坐标系的解决方案,提高了滤波后的测距精度;李鑫洋等[16 ] 引入频谱最大估值算法,减小了快速傅里叶变换计算的测距误差,提高了测距精度;Sim等[17 ] 通过比较包络检测后的采样数来区分每种频率的基带信号,提高了测距精度;Xu等[18 ] 基于相干谱模型提出了连续线性调频z 变换算法,为雷达的精准探测提供了依据;罗韩君等[19 ] 采用统计原理与质心法建立了测距精度的理论模型,证明了回波强度和回波脉宽是测距精度的主要影响因素;李妍等[20 ] 建立了一种针对不确定性数据的雷达探测距离预测模型,有效降低了数据扰动对雷达探测性能的影响;邱志平等[21 ] 提出了一种非概率区间方法来近似估计雷达探测距离. ...
Correlation propagation for uncertainty analysis of structures based on a non-probabilistic ellipsoidal model
2
2020
... 雷达系统存在雷达参数传输波动、信号干扰等不确定性因素,导致性能不稳定.已知雷达参数和干扰参数的数值区间,根据区间模型来度量雷达系统性能的不确定域.将影响雷达系统性能的不确定参数用区间进行量化,如图1 所示,可以表示为[22 ] : ...
... 参数X 的不确定性通过其区间上界X ¯ X ̲ X 的中点和半径分别为X c 和X r ,可以表示为[22 ] : ...
基于响应面代理模型的雷达天线阵面风载分析
2
2019
... 多项式响应面模型具有收敛迅速的优点.将它应用于雷达性能分析中,可以有效提高性能分析的效率.其一般表达式为[23 ] : ...
... 不确定参数之间耦合性强,因此采用高阶多项式作为响应面模型,其表现形式为[23 ] : ...
基于响应面代理模型的雷达天线阵面风载分析
2
2019
... 多项式响应面模型具有收敛迅速的优点.将它应用于雷达性能分析中,可以有效提高性能分析的效率.其一般表达式为[23 ] : ...
... 不确定参数之间耦合性强,因此采用高阶多项式作为响应面模型,其表现形式为[23 ] : ...
基于代理模型的车载雷达阵面风载疲劳分析
1
2020
... 通过观测值与模型预测值之间的复相关系数R 2 E RMS [24 ] 来判断响应面模型在雷达性能分析中的准确性. ...
基于代理模型的车载雷达阵面风载疲劳分析
1
2020
... 通过观测值与模型预测值之间的复相关系数R 2 E RMS [24 ] 来判断响应面模型在雷达性能分析中的准确性. ...
Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates
4
2001
... 假设雷达模型Y = g X = g X 1 , X 2 , ⋯ , X n X i [25 ] : ...
... 总方差V 为[25 ] : ...
... 单个参数的偏方差V i V i 1 , … , i s [25 ] : ...
... 总方差V 表示所有参数对系统输出的影响;偏方差V i V i 1 , … , i s S i 1 , … , i s [25 ] : ...
多参数非线性系统全局敏感性分析与动态代理模型研究
2
2014
... 由上可知,各参数的敏感度之和为1,即[26 ] : ...
... 本文只考虑雷达系统模型的主效应指标,即单个参数对性能的影响程度,表示为[26 ] : ...
多参数非线性系统全局敏感性分析与动态代理模型研究
2
2014
... 由上可知,各参数的敏感度之和为1,即[26 ] : ...
... 本文只考虑雷达系统模型的主效应指标,即单个参数对性能的影响程度,表示为[26 ] : ...
Non-probabilistic uncertain inverse problem method considering correlations for structural parameter identification
3
2021
... 为了提高雷达性能分析效率,本文采用子区间分解分析方法,用响应面模型代替真实性能模型进行分析.子区间分解分析方法(subinterval decomposition analysis method,SDAM)[27 -28 ] 将具有多维区间参数的原雷达系统分解为多个一维子系统,将每个子系统的不确定参数划分为几个不确定度较小的子区间,通过少数子区间的组合分析来近似计算雷达探测距离和测距精度的上界及下界. ...
... 将雷达探测距离和测距精度的响应面模型在区间中点处展开,可以得到[27 ] : ...
... 将式(13) 中的参数分别在每个参数X 1 , X 2 , ⋯ , X n 式(20) 可以求得雷达探测距离和测距精度的上界及下界,其数学模型可进一步表示为[27 ] : ...
A subinterval decomposition analysis method for uncertain structures with large uncertainty parameters
1
2018
... 为了提高雷达性能分析效率,本文采用子区间分解分析方法,用响应面模型代替真实性能模型进行分析.子区间分解分析方法(subinterval decomposition analysis method,SDAM)[27 -28 ] 将具有多维区间参数的原雷达系统分解为多个一维子系统,将每个子系统的不确定参数划分为几个不确定度较小的子区间,通过少数子区间的组合分析来近似计算雷达探测距离和测距精度的上界及下界. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}