基于Transformer的机器人像素级抓取位姿检测
俞青松( ),徐向荣(),刘胤真
),徐向荣(),刘胤真
),徐向荣(),刘胤真
Pixel-level grasping pose detection for robots based on Transformer
Qingsong YU(),Xiangrong XU(),Yinzhen LIU
),Xiangrong XU(),Yinzhen LIU
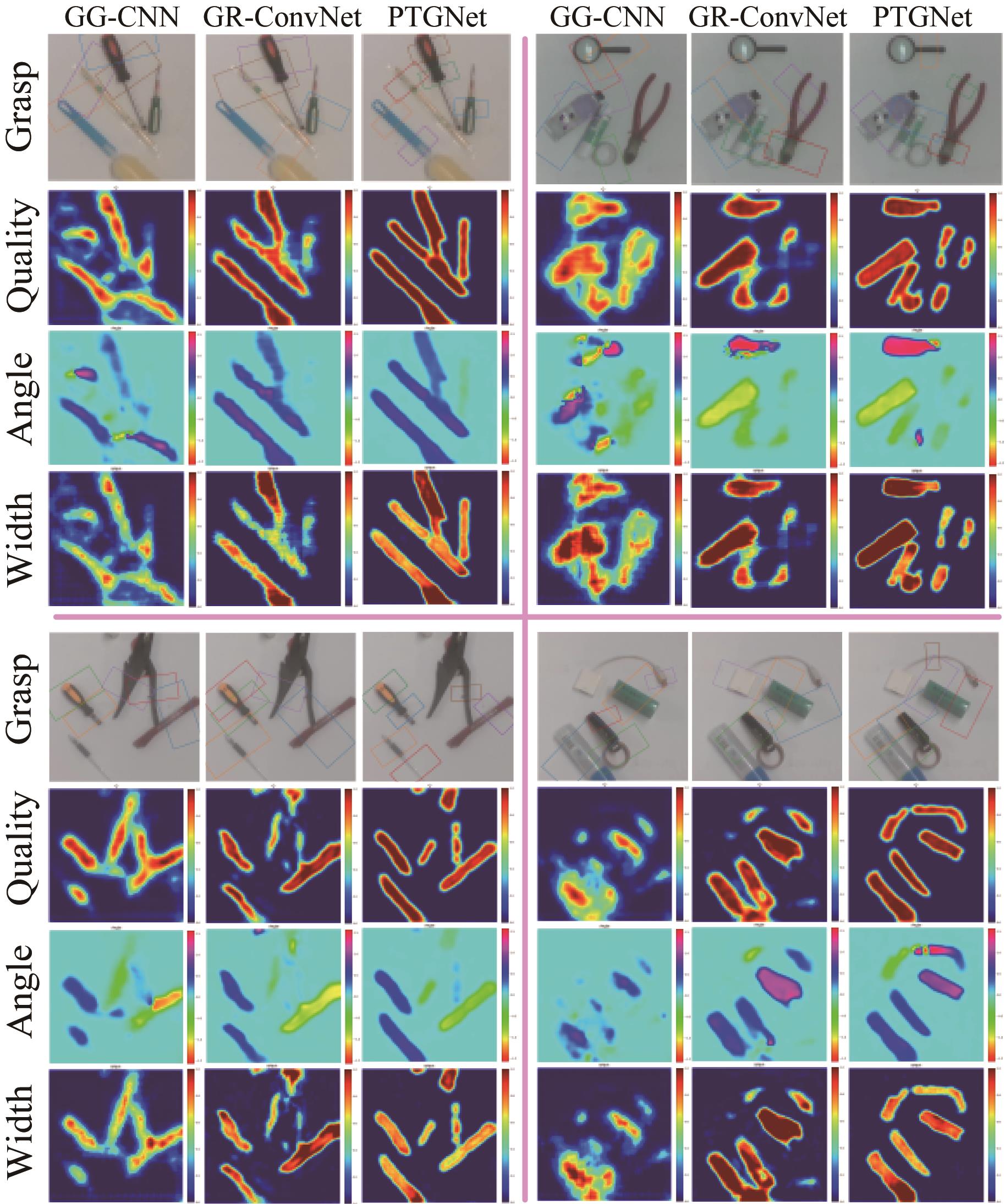
图6. 不同抓取检测模型在杂乱数据集上的部分检测结果
Fig.6. Partial detection results of different grasping detection models on clutter dataset