一种柔性采摘机械臂的运动学分析与仿真
张伟涛( ),赵栋杰(),王禄,包新棉,黄保赛
),赵栋杰(),王禄,包新棉,黄保赛
),赵栋杰(),王禄,包新棉,黄保赛
Kinematics analysis and simulation of a flexible picking robot arm
Weitao ZHANG(),Dongjie ZHAO(),Lu WANG,Xinmian BAO,Baosai HUANG
),Dongjie ZHAO(),Lu WANG,Xinmian BAO,Baosai HUANG
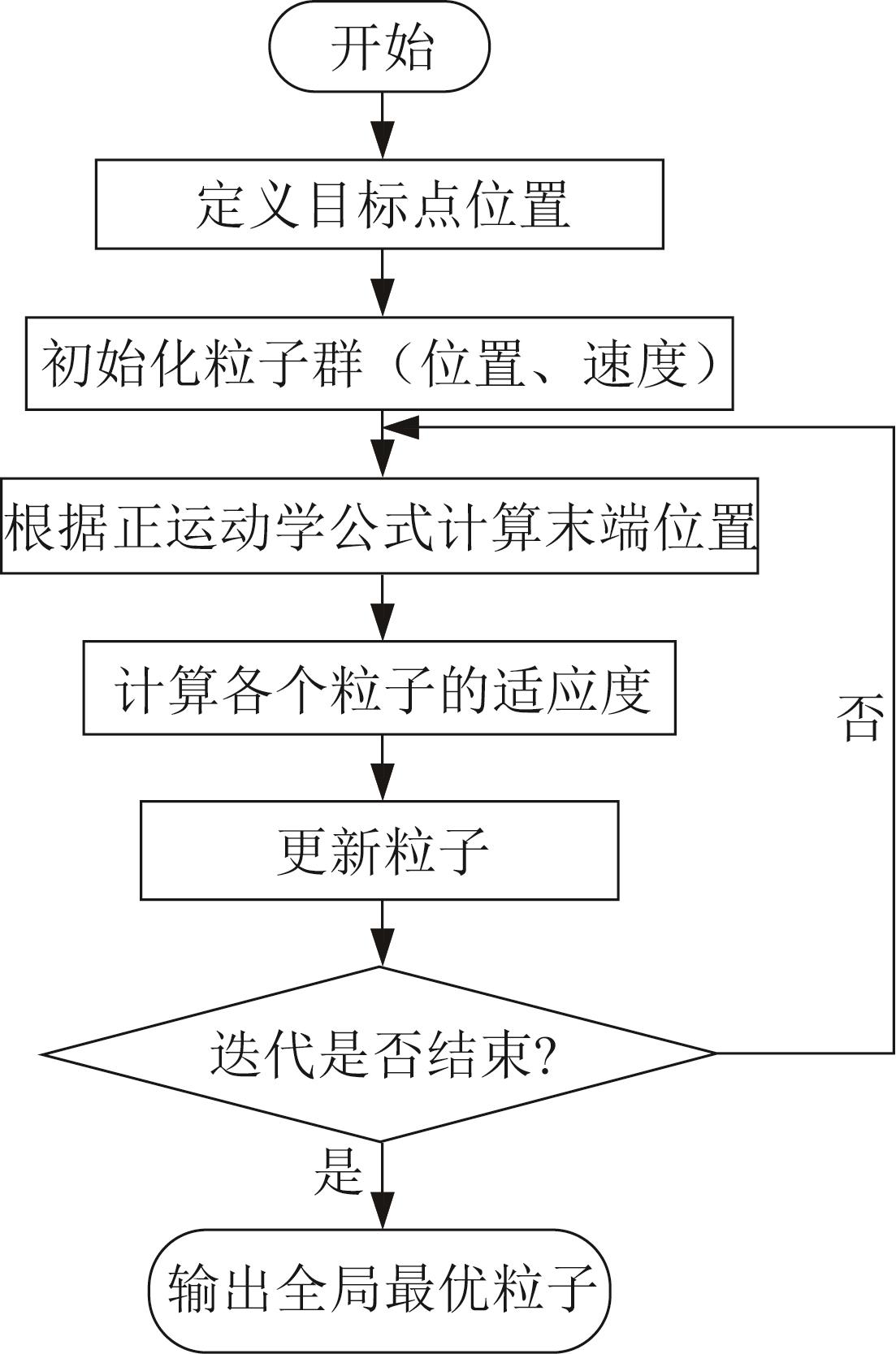
图7. 基于PSO的柔性采摘机械臂逆运动学分析流程
Fig.7. Inverse kinematics analysis process of flexible picking robot arm based on PSO