3-PUU并联机构的运动学分析与验证
Kinematics analysis and validation of 3-PUU parallel mechanism
3-PUU并联机构的运动学分析与验证 |
| 陈明方,黄良恩,张永霞,姚国一 |
|
Kinematics analysis and validation of 3-PUU parallel mechanism |
| Mingfang CHEN,Liangen HUANG,Yongxia ZHANG,Guoyi YAO |
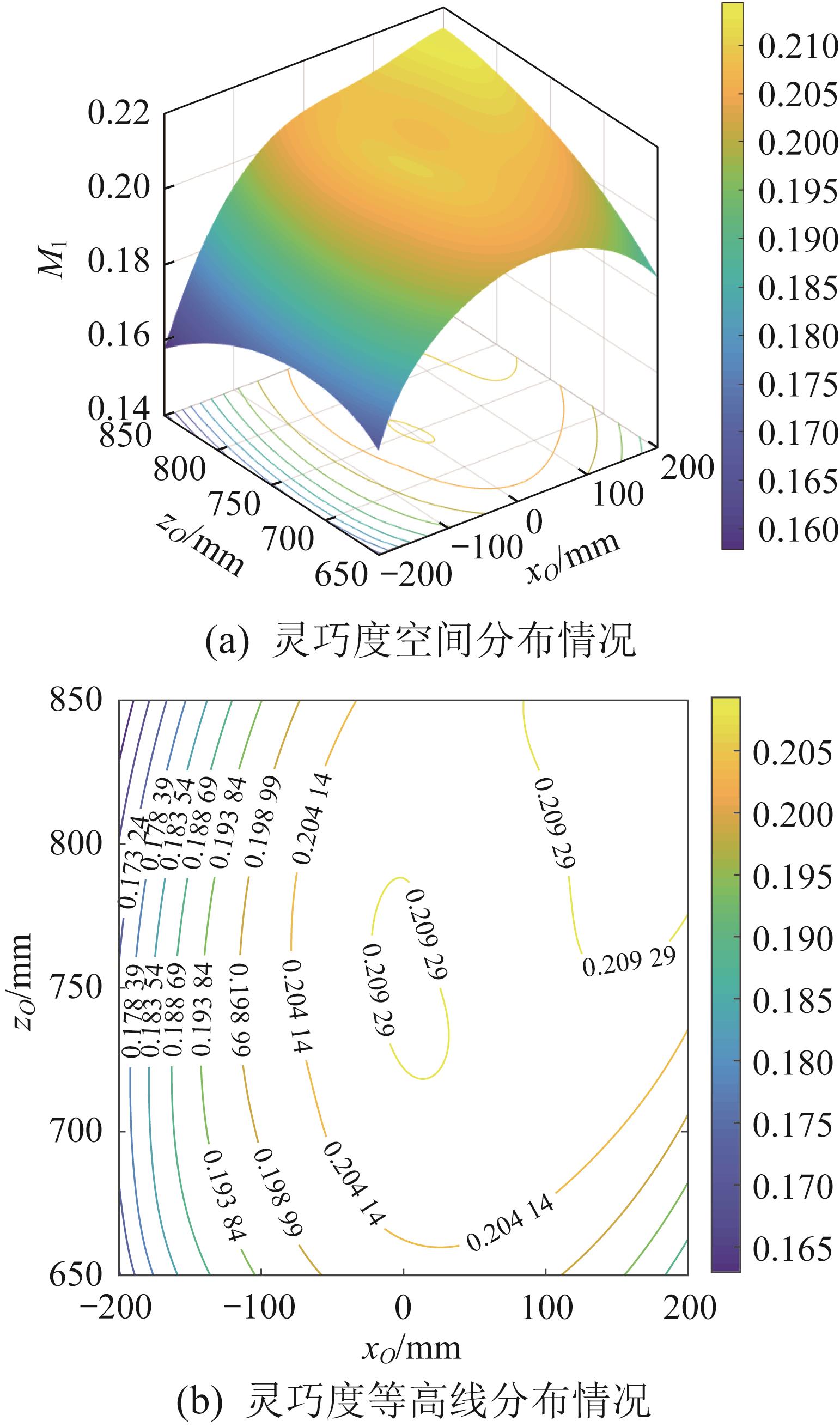
| 图6 yO =0 mm时3-PUU并联机构的灵巧度分布 |
| Fig.6 Dexterity distribution of 3-PUU parallel mechanism under yO =0 mm |
|
|