基于改进RRT算法的避障路径规划
Obstacle avoidance path planning based on improved RRT algorithm
基于改进RRT算法的避障路径规划 |
| 冯垚,周志峰,沈亦纯,王立端 |
|
Obstacle avoidance path planning based on improved RRT algorithm |
| Yao FENG,Zhifeng ZHOU,Yichun SHEN,Liduan WANG |
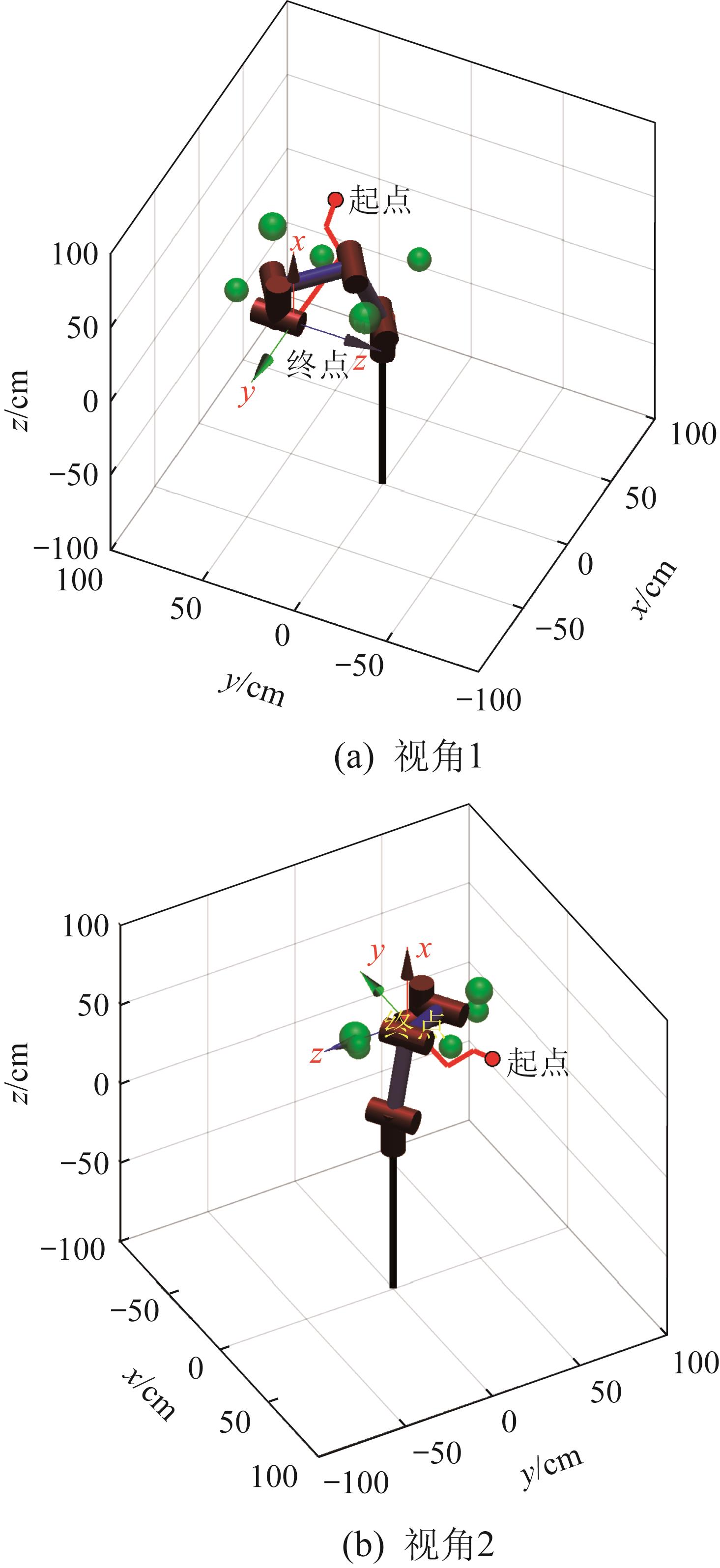
| 图9 基于改进RRT算法的机械臂避障路径规划结果 |
| Fig. 9 Obstacle avoidance path planning result of robotic arm based on improved RRT algorithm |
|
|