基于跳点搜索-遗传算法的自主移动机器人路径规划
Path planning of autonomous mobile robot based on jump point search-genetic algorithm
基于跳点搜索-遗传算法的自主移动机器人路径规划 |
| 田雅琴,胡梦辉,刘文涛,侯寅智 |
|
Path planning of autonomous mobile robot based on jump point search-genetic algorithm |
| Yaqin TIAN,Menghui HU,Wentao LIU,Yinzhi HOU |
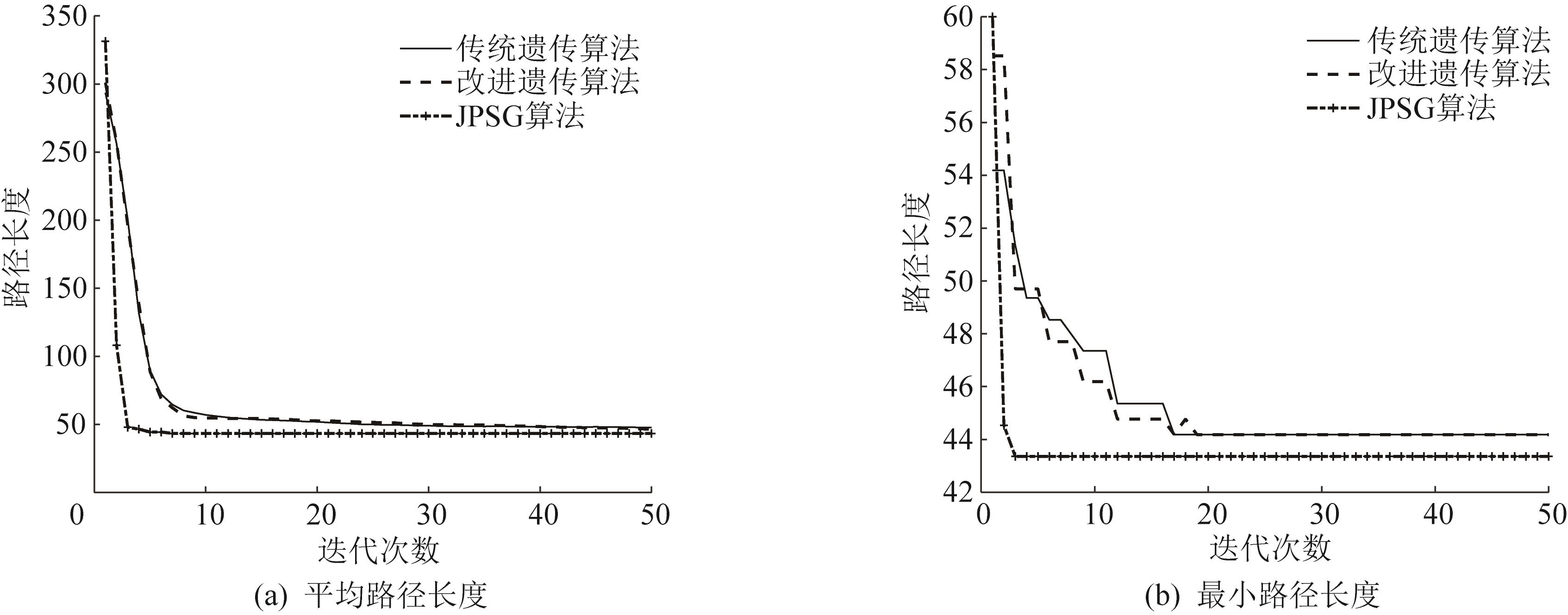
| 图9 静态环境下规划路径长度的仿真结果 |
| Fig.9 |
|
|