基于优化Hector-SLAM算法的机器人自主导航系统设计
Design of robot autonomous navigation system based on optimized Hector-SLAM algorithm
基于优化Hector-SLAM算法的机器人自主导航系统设计 |
| 汪建华,黄磊,石雨婷,张晓倩,祁良剑 |
|
Design of robot autonomous navigation system based on optimized Hector-SLAM algorithm |
| Jianhua WANG,Lei HUANG,Yuting SHI,Xiaoqian ZHANG,Liangjian QI |
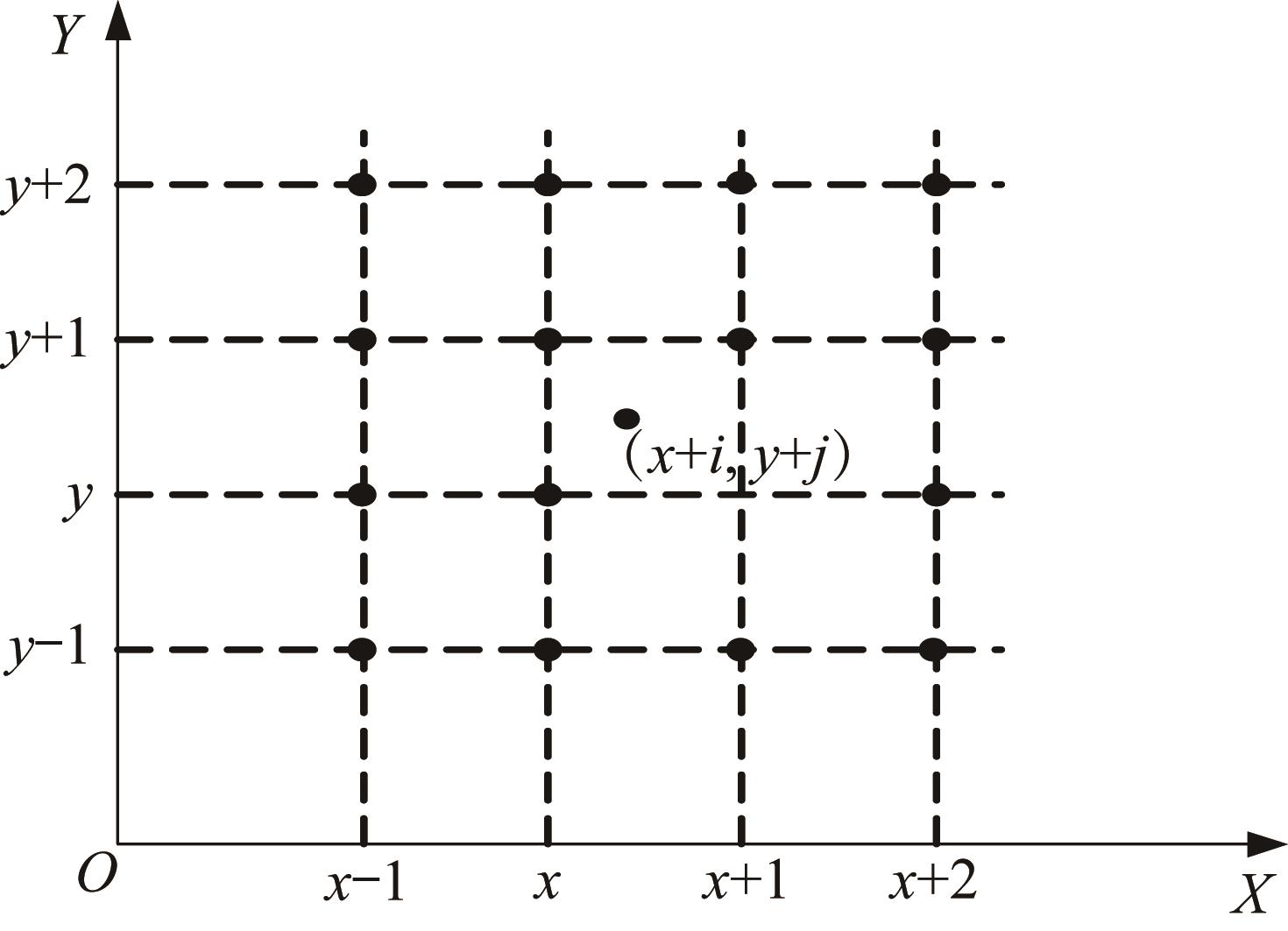
| 图1 双三次插值模型示意 |
| Fig.1 Schematic of bicubic interpolation model |
|
|