新型线驱动式微创手术器械结构设计与运动学分析
Structural design and kinematics analysis of new cable-driven minimally invasive surgical instrument
新型线驱动式微创手术器械结构设计与运动学分析 |
| 赵万博,陈赛旋,姜官武,李荣,章宇 |
|
Structural design and kinematics analysis of new cable-driven minimally invasive surgical instrument |
| Wanbo ZHAO,Saixuan CHEN,Guanwu JIANG,Rong LI,Yu ZHANG |
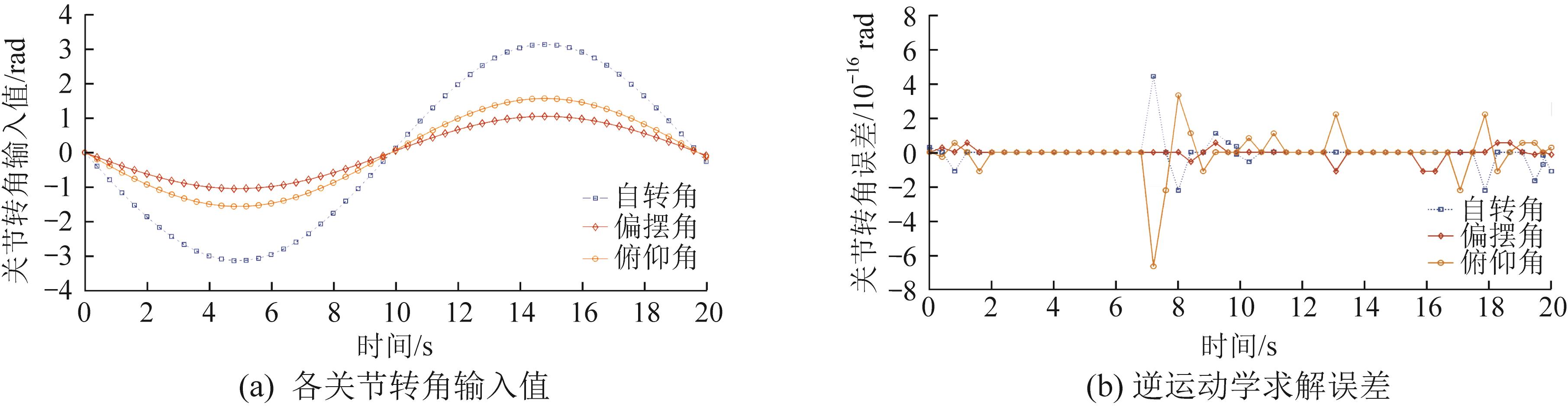
| 图14 新型线驱动式手术器械逆运动学仿真验证结果 |
| Fig.14 Verification results of for inverse kinematics simulation of new cable-driven surgical instrument |
|
|