更换电铲钢丝绳专用机械臂架的结构及动力学分析
Structure and dynamics analysis of special manipulator frame for replacing wire rope of electric shovel
更换电铲钢丝绳专用机械臂架的结构及动力学分析 |
| 陈洪月,蔡明航,杨辛未,戴忠桓 |
|
Structure and dynamics analysis of special manipulator frame for replacing wire rope of electric shovel |
| Hongyue CHEN,Minghang CAI,Xinwei YANG,Zhonghuan DAI |
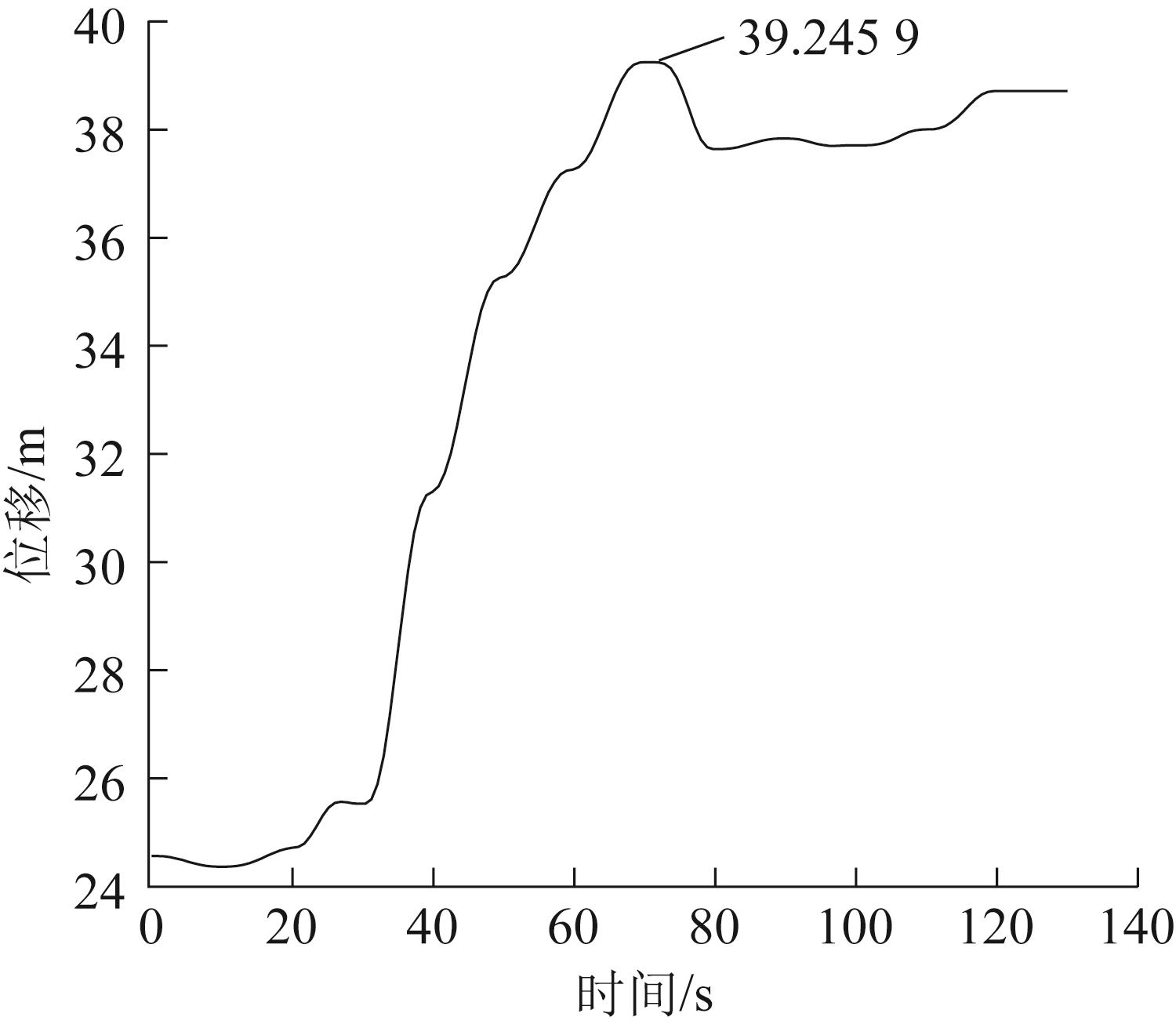
| 图5 全刚体无钢丝绳状态下末端执行器的位移 |
| Fig.5 End effector displacement in the state of complete rigid body without wire rope |
|
|