基于自适应神经网络的机械臂滑模轨迹跟踪控制
Sliding mode trajectory tracking control of manipulator based on adaptive neural network
基于自适应神经网络的机械臂滑模轨迹跟踪控制 |
| 李琦琦,徐向荣,张卉 |
|
Sliding mode trajectory tracking control of manipulator based on adaptive neural network |
| Qiqi LI,Xiangrong XU,Hui ZHANG |
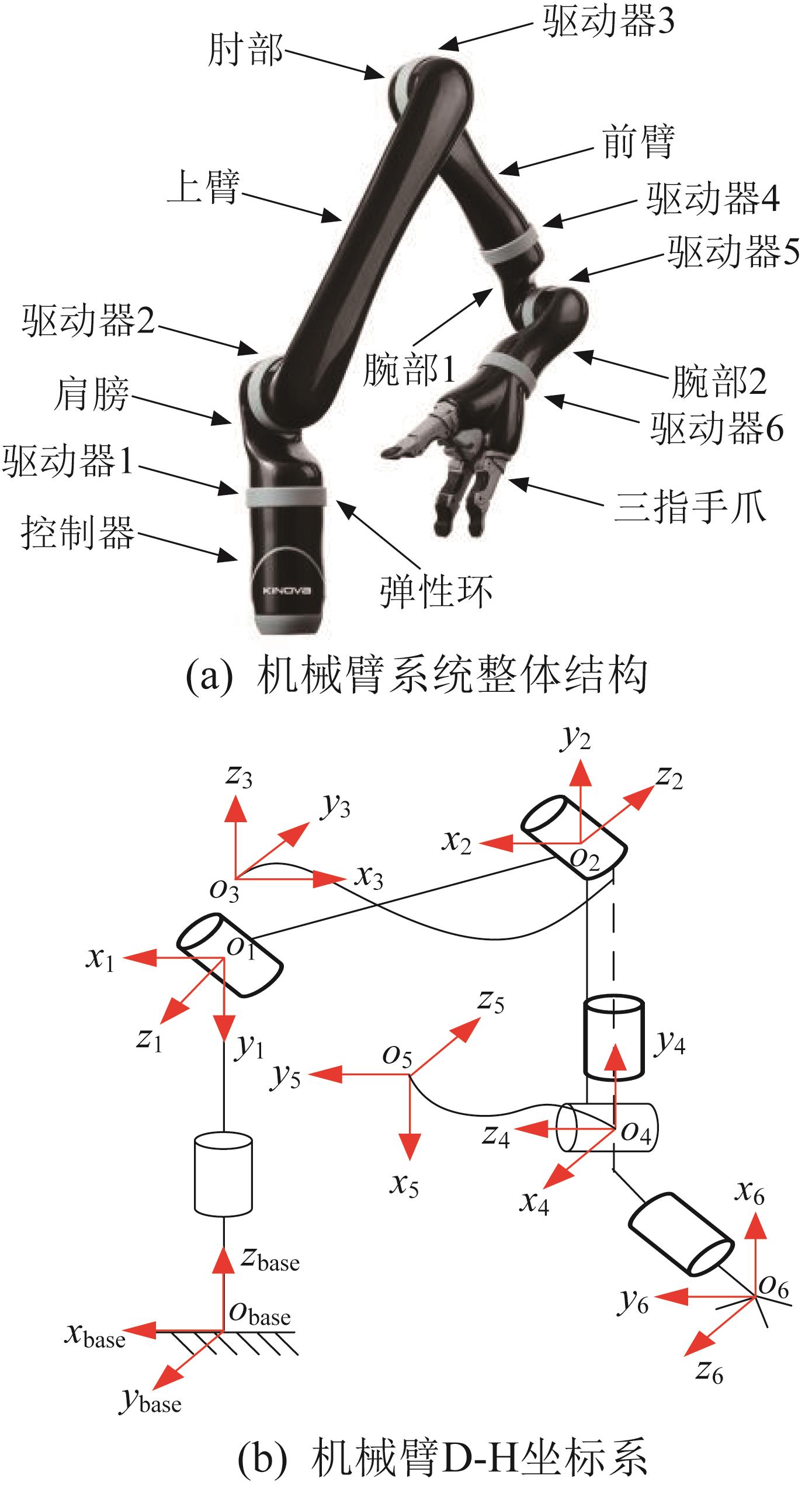
| 图1 六自由度机械臂系统结构及其D-H坐标系 |
| Fig.1 Structure of six-degree-of-freedom manipulator system and its D-H coordinate system |
|
|