多关节蛇形机器人的结构设计和运动实现
Structure design and motion realization of multi-joint snakelike robot
多关节蛇形机器人的结构设计和运动实现 |
| 杜雪林,易文慧,邹家华,周灿,毛立,邓利诗,刘颖 |
|
Structure design and motion realization of multi-joint snakelike robot |
| Xuelin DU,Wenhui YI,Jiahua ZOU,Can ZHOU,Li MAO,Lishi DENG,Ying LIU |
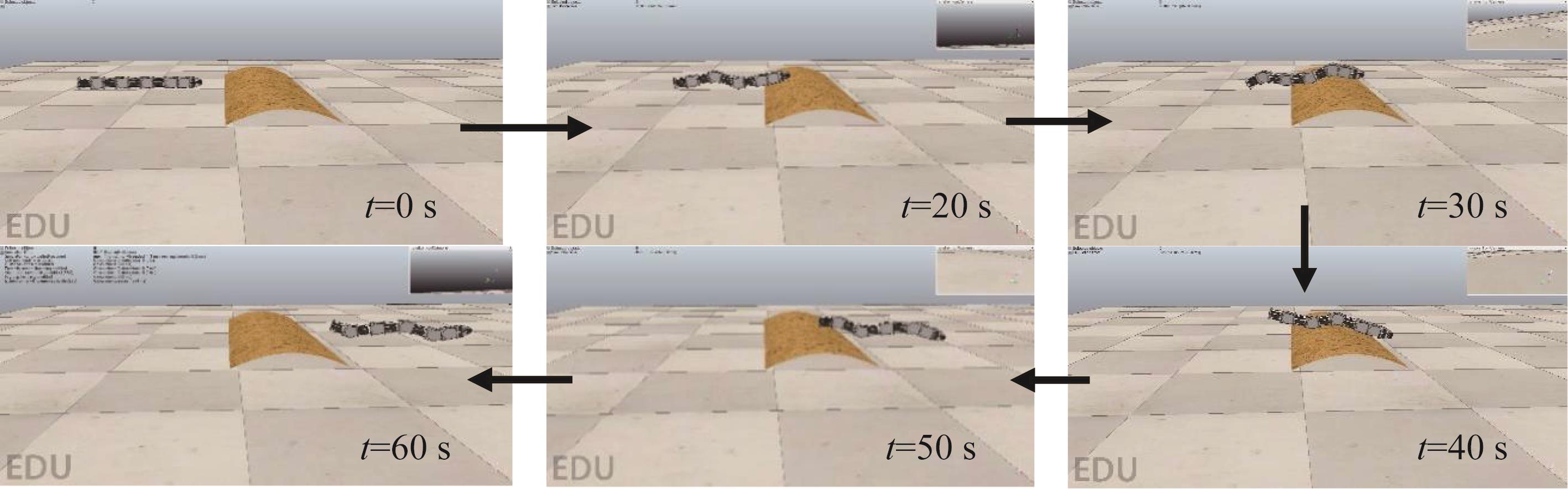
| 图20 蛇形机器人越障过程仿真结果 |
| Fig.20 Simulation result of obstacle surmounting process of snakelike robot |
|
|