基于SIMP方法的爬杆机器人结构优化与分析
Structure optimization and analysis of pole-climbing robot based on SIMP method
基于SIMP方法的爬杆机器人结构优化与分析 |
| 郑小飞,黄镇海,马小龙,王建新,王斌锐 |
|
Structure optimization and analysis of pole-climbing robot based on SIMP method |
| Xiaofei ZHENG,Zhenhai HUANG,Xiaolong MA,Jianxin WANG,Binrui WANG |
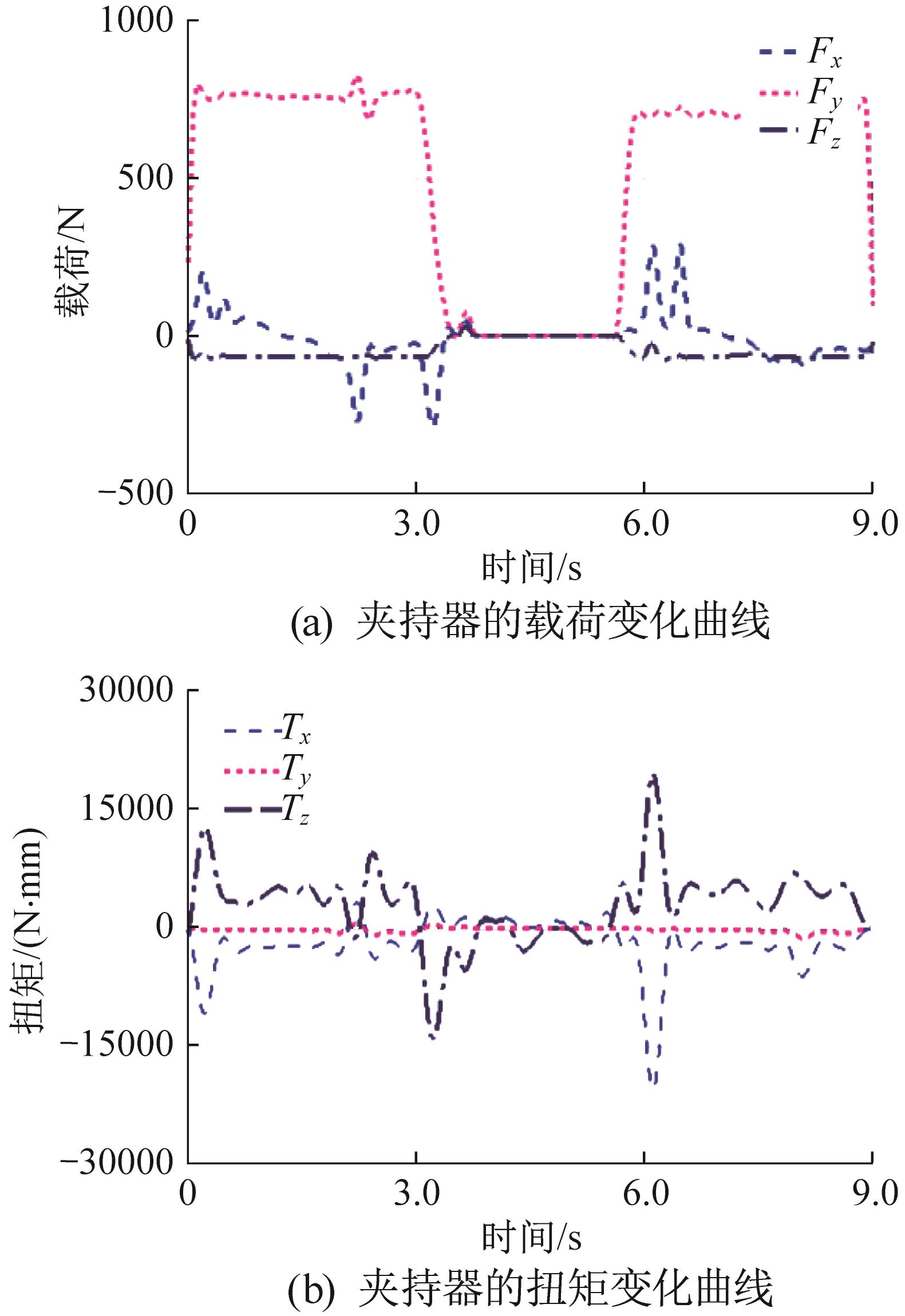
| 图4 夹持器的载荷和扭矩变化曲线 |
| Fig.4 Load and torque change curves of gripper |
|
|