两栖仿海龟机器人动力学建模与运动控制研究
Research on dynamic modeling and motion control of amphibious turtle inspired robot
两栖仿海龟机器人动力学建模与运动控制研究 |
| 芮宏斌,李路路,王天赐,段凯文 |
|
Research on dynamic modeling and motion control of amphibious turtle inspired robot |
| Hong-bin RUI,Lu-lu LI,Tian-ci WANG,Kai-wen DUAN |
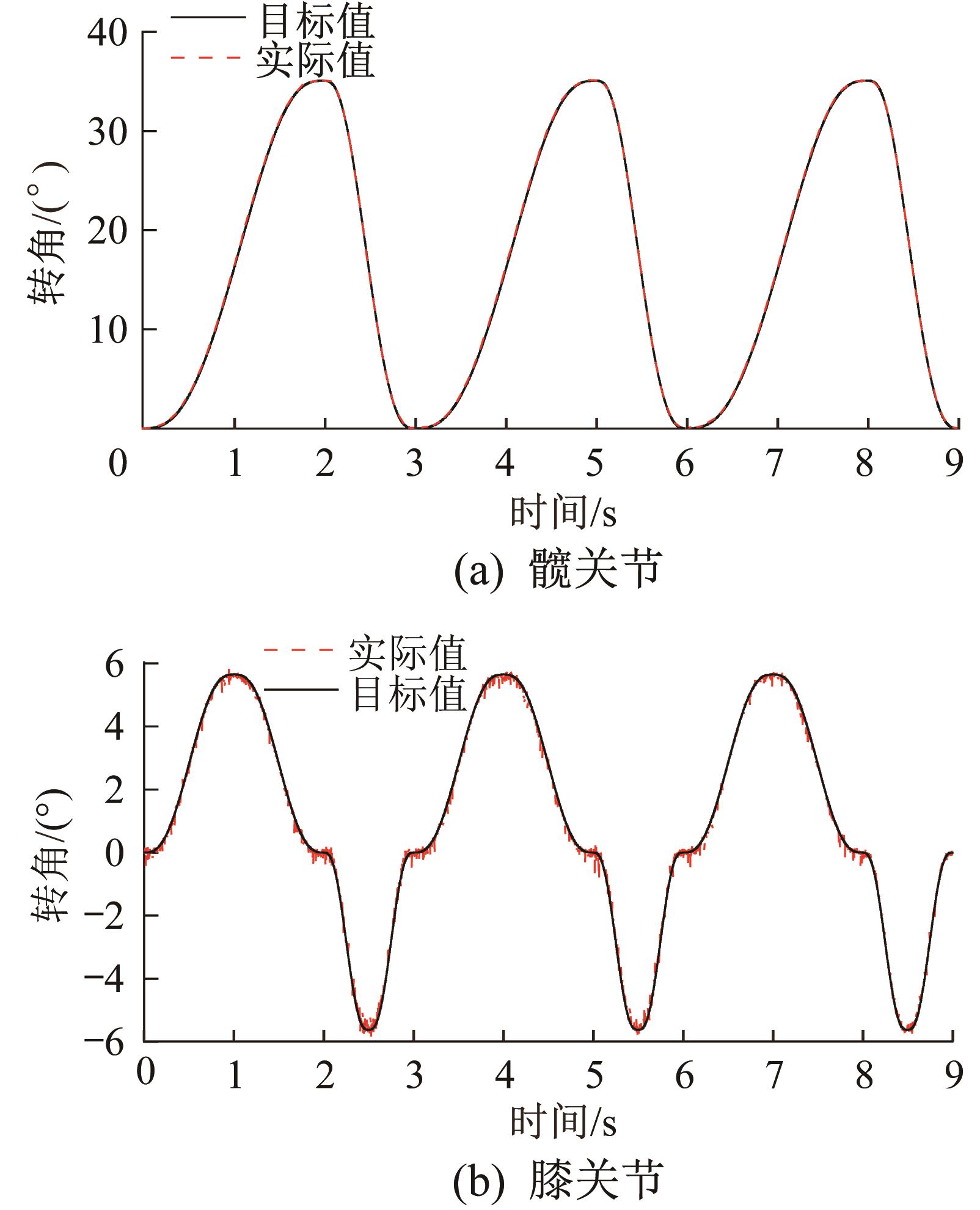
| 图12 纯位置控制模式下支腿关节转角的变化曲线 |
| Fig.12 Variation curve of outrigger joint angle under pure position control mode |
|
|