大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] 。目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] 。另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] 。近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器。区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] 。基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台。
为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] 。目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] 。但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] 。
针对上述问题,笔者提出采用考虑加权漏磁系数的磁路建模方法对大行程麦克斯韦磁阻驱动器进行磁场和推力建模。首先,建立磁阻驱动器考虑漏磁前后的工作磁路,分析永磁偏置磁路的作用以及使用永磁偏置结构后仍具有非线性的原因,并利用电磁学基本原理及磁场的可叠加性建立磁阻驱动器的推力解析模型。然后,构建磁阻驱动器的三维模型,并利用有限元仿真软件进行三维磁场仿真分析,得到磁阻驱动器在永磁体及励磁线圈单独作用时的磁场分布情况及每个气隙处的加权漏磁系数,以准确描述其漏磁的大小及空间分布。最后,通过在磁阻驱动器磁路中增加漏磁磁阻来减小漏磁的影响,得到考虑加权漏磁系数的推力解析模型,并通过实验验证不同位置处推力随输入电流的变化情况,以验证解析模型的准确性。
1 大行程麦克斯韦磁阻驱动器的结构
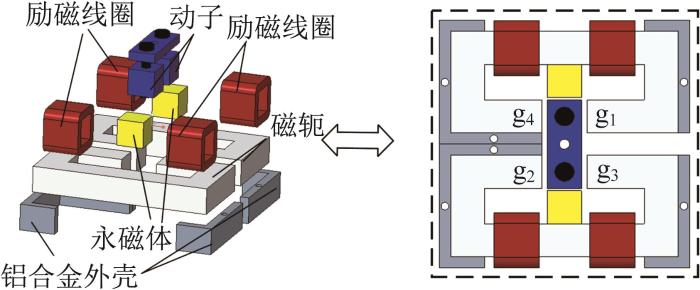
图1 所示为大行程麦克斯韦磁阻驱动器的整体结构,其由2个对称布置的驱动单元组成。该磁阻驱动器的定子由2组尺寸较大的C形磁轭、汝铁硼(Nd-Fe-B)永磁体和4组励磁线圈组成,其中永磁体提供偏置磁场,可改善磁阻驱动器的磁路,实现电磁驱动力的线性化;动子由与定子磁轭材料相同的2组硅钢片金属块相连而成;磁轭外侧安装的铝合金外壳可极大程度地减少磁轭周围的漏磁,相比于气隙(磁轭与动子之间部分,共4个气隙,记为g1 、g2 、g3 和g4 )中的漏磁,该部分漏磁可以忽略不计。本文所设计的磁阻驱动器的结构尺寸如表1 所示。
图1
图1
大行程麦克斯韦磁阻驱动器整体结构
Fig.1
Overall structure of large stroke Maxwell reluctance actuator
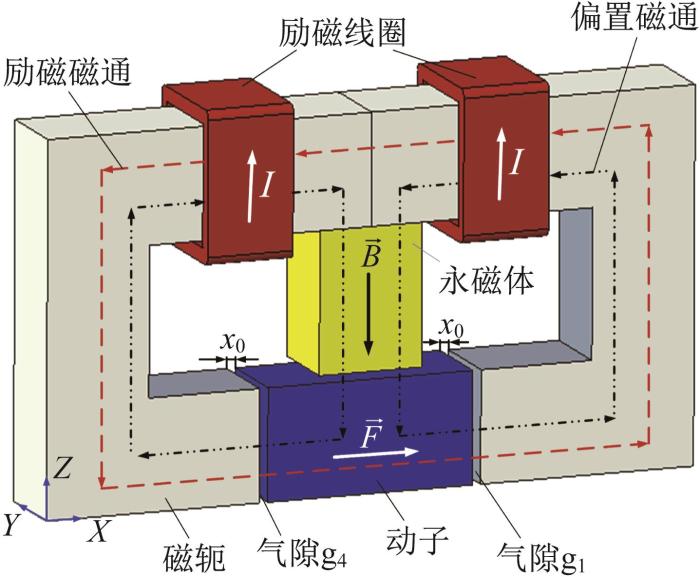
图2 所示为大行程麦克斯韦磁阻驱动器的永磁偏置原理(因结构对称,仅显示单个驱动单元)。令动子处于中间位置时为坐标系各轴的初始位置,对应动子位置x =0 mm,此时左右的初始气隙宽度x 0 相等。由图2 可知,该磁阻驱动器单个驱动单元的磁场主要由两部分组成:第1部分是由永磁体产生的偏置磁场;第2部分是施加电流I 时励磁线圈产生的励磁磁场。由麦克斯韦力计算公式及磁场的可叠加性可知,当偏置磁场和励磁磁场叠加作用时,动子左右两侧的磁感应强度出现差异,即动子受到差动的麦克斯韦力,可产生与输入电流I 呈良好线性关系的推力F 。由此可见,推力F 的大小与初始气隙宽度直接相关,随着初始气隙宽度的不断增大(本文取2.5 mm),气隙中的漏磁及磁场分布不均匀的程度增加,导致磁阻驱动器的推力密度(电机常数)随着初始气隙宽度的增大而减小,且呈现较为严重的非线性。因此,为了实现大行程麦克斯韦磁阻驱动器的精确结构设计和控制,需要对其磁场和推力进行准确建模与分析。
图2
图2
大行程麦克斯韦磁阻驱动器的永磁偏置原理
Fig.2
Permanent magnetic bias principle of large stroke Maxwell reluctance actuator
2 大行程麦克斯韦磁阻驱动器推力模型的建立
2.1 理想推力模型
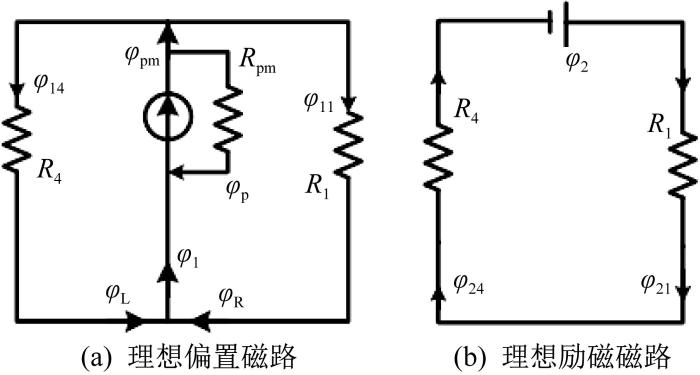
为了得到不考虑漏磁的理想情况下大行程麦克斯韦磁阻驱动器的推力与气隙中磁感应强度的函数关系并建立相应的解析模型,分别建立其单个驱动单元的理想偏置磁路和理想励磁磁路,如图3 所示。图3 (a)中:R pm 为永磁体的磁阻;φ p 为流经永磁体磁阻R pm 的磁通;φ pm 为永磁体内部磁场强度等于0 T时所产生的总磁通;φ 1 为流入永磁体的总偏置磁通;φ L 、φ 14 和φ R 、φ 11 分别为流经左、右气隙磁阻R 1 和R 4 的磁通,φ L =φ 14 ,φ R =φ 11 。图3 (b)中:气隙磁阻R 1 与R 4 串联,故流经磁阻R 1 和R 4 的磁通φ 21 与φ 24 相等,且等于磁路中的总磁通φ 2 。
图3
图3
理想偏置磁路和理想励磁磁路
Fig.3
Ideal bias magnetic circuit and ideal excitation magnetic circuit
利用磁阻计算公式,可得气隙g1 、g2 、g3 和g4 处的磁阻R 1 、R 2 、R 3 、R 4 ,分别为:
R 2 = R 4 = x 0 + x μ 0 S R 1 = R 3 = x 0 - x μ 0 S (1)
式中:μ 0 为真空磁导率,μ 0 =4π×10-7 N/A2 ;S 为垂直于磁通方向的磁轭及动子的横截面面积。
φ p m = B r S R p m = L p m / μ 0 S (2)
联立磁阻计算式(1)和式(2),可得气隙g1 、g4 中的磁感应强度B 11 和B 14 ,分别为:
B 11 = φ 11 S = R p m φ p m R 1 S = L p m B r x 0 - x B 14 = φ 14 S = R p m φ p m R 4 S = L p m B r x 0 + x (3)
对于理想励磁磁路,其总磁通φ 2 以及气隙g1 、g4 中的磁感应强度B 21 和B 24 分别为:
φ 2 = 2 N I R 1 + R 4 = μ 0 N I S x 0 B 21 = B 24 = μ 0 N I x (4)
式中:N 为单个励磁线圈匝数,本文取N =200;I 为励磁电流。
联立式(3)和式(4),可得在不考虑漏磁的理想情况下磁阻驱动器单个驱动单元的推力F id :
F i d = S 2 μ 0 ( B 11 + B 21 ) 2 - ( B 14 + B 24 ) 2 (5)
综上,在不考虑漏磁的理想情况下,整个大行程麦克斯韦磁阻驱动器的总推力F ia =2F id 。
2.2 考虑漏磁的推力模型
随着大行程麦克斯韦磁阻驱动器磁轭与动子间初始气隙宽度的增大,气隙中磁场分布不均匀程度上升且非线性更加强烈,导致气隙处的漏磁现象对磁阻驱动器推力的影响显著增加。因此,对于大行程麦克斯韦磁阻驱动器,理想情况下的推力模型误差较大,难以准确描述其推力F 与输入电流I 之间的关系。为了使推力解析模型更加精确,必须考虑实际工作过程中由磁阻驱动器材料固有特性以及气隙中磁场分布不均匀导致的漏磁现象。由麦克斯韦定律可知,由于漏磁通未穿过动子横截面,因此无法参与麦克斯韦力的产生,减小了该磁阻驱动器的推力。为了清晰地描述偏置磁路和励磁磁路中的漏磁情况,分别在2种磁路中加入漏磁磁阻,并对添加漏磁磁阻后的磁路进行进一步分析,以建立考虑漏磁的推力解析模型。
图4 所示分别为考虑漏磁的偏置磁路和励磁磁路。图中:R L11 、R L14 分别为气隙g1 、g4 中的偏置漏磁磁阻,φ L11 、φ L14 为流经相应偏置漏磁磁阻的漏磁磁通;R L21 、R L24 分别为气隙g1 、g4 中的励磁漏磁磁阻,φ L21 、φ L24 为流经相应励磁漏磁磁阻的漏磁磁通;其余参数与图3 同。定义偏置磁路中流入永磁体的磁通φ 1 与流入气隙磁阻R 1 、R 4 的磁通φ 11 、φ 14 的比值为偏置漏磁系数k 1 j j =1, 4);励磁磁路中总磁通φ 2 与流入气隙磁阻R 1 、R 4 的磁通φ 21 、φ 24 的比值为励磁漏磁系数k 2 j j =1, 4)。则偏置漏磁系数k 1 j k 2 j
k i j = φ i φ i j , i = 1 , 2 ; j = 1 , 4 (6)
图4
图4
考虑漏磁的偏置磁路和励磁磁路
Fig.4
Bias magnetic circuit and excitation magnetic circuit considering magnetic flux leakage
对于图4 (a)所示的考虑漏磁的偏置磁路,由电磁学理论可知,气隙磁阻与漏磁磁阻并联,且均与永磁体并联,则气隙g1 和气隙g4 处磁动势相等,可得:
φ 1 + φ p = φ p m R i φ 1 i = R L 1 i ( φ L - φ 1 i ) , i = 1 , 4 φ p φ R = R 4 / / R L 14 R p m (7)
联立式(1)、式(2)、式(6)和式(7),得到偏置磁路中气隙g1 、g4 处的磁感应强度B 11 、B 14 :
B 11 = B r L p m k 11 k 11 2 ( S L p m + x 0 - x ) B 14 = B r L p m k 14 k 14 2 ( S L p m + x 0 + x ) (8)
对于图4 (b)所示的考虑漏磁的励磁磁路,由安培环路定律和磁路的欧姆定律可知:
φ 2 i + φ L 2 i = φ 2 2 N I = φ 2 ( R i / / R L 2 i ) R L 2 i = φ 2 i / ( φ 2 - φ 2 i ) R i (9)
B 21 = 4 N I μ 0 ( x 0 + x ) + k 21 k 24 ( x 0 - x ) B 24 = 4 N I μ 0 k 24 k 21 ( x 0 + x ) + ( x 0 - x ) (10)
由电磁学理论以及磁场的可叠加性可知,当考虑漏磁的偏置磁路与励磁磁路同时作用时,气隙g1 、g4 处的磁感应强度为:
B g 1 = B r L p m k 11 k 11 2 ( S L p m + x 0 - x ) + 4 N I μ 0 ( x 0 + x ) + k 21 k 24 ( x 0 - x ) B g 4 = 4 N I μ 0 k 24 k 21 ( x 0 + x ) + ( x 0 - x ) - B r L p m k 14 k 14 2 ( S L p m + x 0 + x ) (11)
联立式(5)和式(11),可得考虑漏磁的大行程麦克斯韦磁阻驱动器的推力F a :
F a = S μ 0 ( B g 1 2 - B g 4 2 ) (12)
2.3 漏磁系数仿真计算
虽然上文所建立的考虑漏磁的推力解析模型可揭示大行程麦克斯韦磁阻驱动器采用永磁偏置磁路后仍具有非线性的原因,但在实际建模过程中,与动子位置x 相关的漏磁系数kij (i =1, 2; j =1, 4)的值很难通过理论分析或实验方法获得。此外,随着初始气隙宽度x 0 的增大,基于单平面磁通的传统漏磁系数计算方法的误差较大,无法准确描述大行程麦克斯韦磁阻驱动器的漏磁情况。为了获得更加准确的漏磁系数,提高推力解析模型的精确性,利用有限元仿真软件ANSYS中的Maxwell 3D模块对大行程麦克斯韦磁阻驱动器的三维磁场进行分析,以获得与定子位置相关的漏磁系数,仿真所用的具体参数如表2 所示。
图5 所示为大行程麦克斯韦磁阻驱动器动子位置x =0 mm时,其励磁磁场和偏置磁场的磁感应强度分布情况。由图5 可知,对于偏置磁路,当动子处于初始位置时,磁轭及气隙中的磁感应强度以永磁体为中心线对称分布,此时气隙g1 、g4 中的磁感应强度分布情况基本相同。对于励磁磁场,当动子处于初始位置时,其分布规律与偏置磁场大致相同,磁通基本沿磁轭流动,且动子两侧气隙中的磁感应强度相等。另外,从图中还可以看出,铝合金外壳的存在较好地抑制了磁轭周围的漏磁现象。
图5
图5
偏置磁场和励磁磁场的磁感应强度分布云图
Fig.5
Nephogram of magnetic induction intensity distribution of bias magnetic field and excitation magnetic field
进一步对励磁磁场和偏置磁场叠加作用时大行程麦克斯韦磁阻驱动器的磁感应强度分布情况进行分析,结果如图6 所示。由于偏置磁场的磁感应强度在磁轭中呈对称分布,当偏置磁场与励磁磁场叠加后,磁轭及气隙中一侧的磁感应强度减弱,另一侧的磁感应强度增强,使得动子两侧受到差动的麦克斯韦力。通过合理的参数配置,可从理论上消除该磁阻驱动器的非线性。然而,随着磁阻驱动器运动范围的增大,气隙中漏磁现象的影响逐渐变大,导致其推力与输入电流之间仍呈非线性关系。
图6
图6
励磁磁场和偏置磁场叠加时的磁感应强度分布情况
Fig.6
Magnetic induction intensity distribution with superposition of bias magnetic field and excitation magnetic field
此外,不同于常规麦克斯韦磁阻驱动器微米级的运动范围,当初始气隙宽度x 0 =2~3 mm时,直接使用传统单平面磁通计算方法获得的漏磁系数会影响大行程麦克斯韦磁阻驱动器推力解析模型的精度。因此,在大行程麦克斯韦磁阻驱动器建模过程中,需要对流经大气隙中不同位置平面上的磁通进行加权处理,以提高漏磁系数对其漏磁分布的描述精度。
为了获得加权漏磁系数,首先,分别令气隙g4 中动子的左侧横截面以及气隙g1 中磁轭的左侧横截面为中心平面,利用方差为0.5 mm的高斯曲线选取气隙g4 及g1 中的磁通测量平面S i 4 , p S i 1 , p ( i = 1 , 2 ; p = 1 , 2 , 3 , 4 , 5 ) S p 、磁轭横截面S c 以及气隙g4 和g1 中横截面S i 4 , p S i 1 , p ( i = 1 , 2 ; p = 1 , 2 , 3 , 4 , 5 ) φ 1 、 φ 2 、 φ i 4 , p φ i 1 , p ( i = 1 , 2 ; p = 1 , 2 , 3 , 4 , 5 ) S i 4 , p S i 1 , p ( i = 1 , 2 ; p = 1 , 2 , 3 , 4 , 5 ) λ i 4 , p λ i 1 , p ( i = 1 , 2 ; p = 1 , 2 , 3 , 4 , 5 ) 4 和g1 中的加权磁通:
φ i 4 a = ∑ p = 1 5 λ i 4 , p φ i 4 , p , i = 1 , 2 ; p = 1 , 2 , 3 , 4 , 5 φ i 1 a = ∑ p = 1 5 λ i 1 , p φ i 4 , p , i = 1 , 2 ; p = 1 , 2 , 3 , 4 , 5 (13)
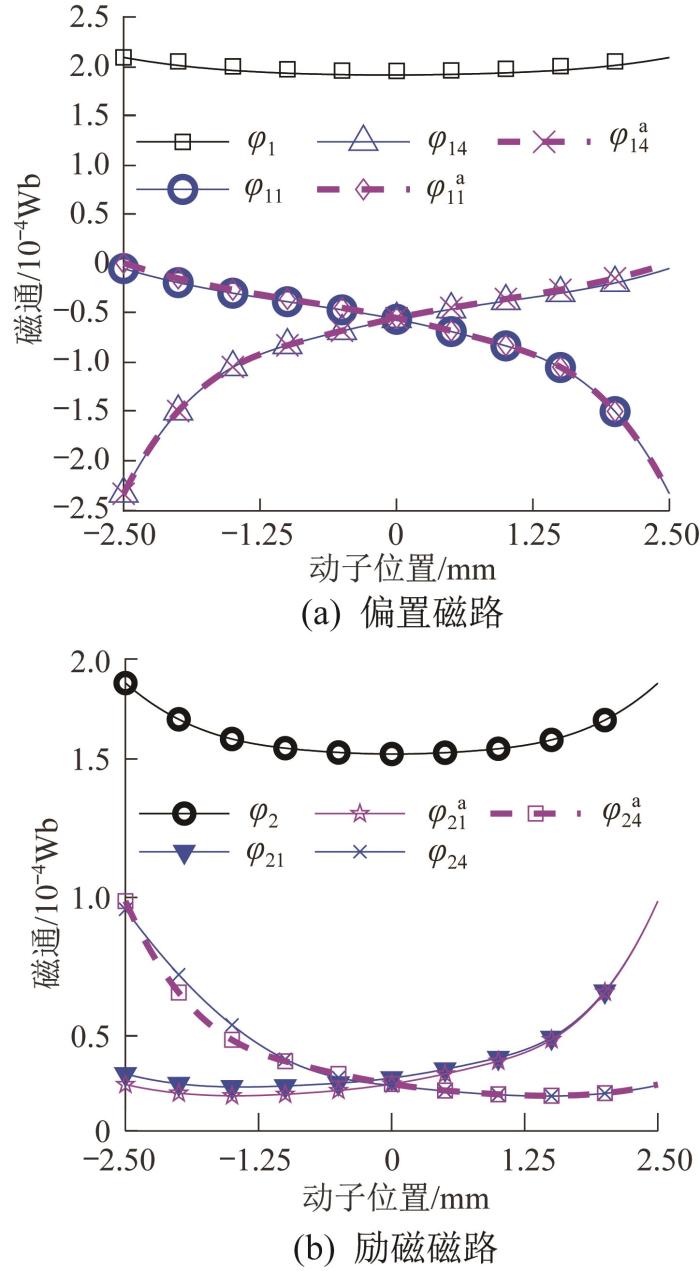
最终计算得到的大行程麦克斯韦磁阻驱动器偏置磁路及励磁磁路中的磁通如图7 所示,图中正负号代表磁通的流动方向。由图7 可知,在动子从x =-2.5 mm移动到x =2.5 mm的过程中,气隙g4 中的工作磁通逐渐减小,漏磁通逐渐增加,而气隙g1 中的工作磁通随气隙宽度的减小而逐渐增大。由此可知,在该磁阻驱动器的整个行程中,其磁通变化呈非线性,当行程小于0.5 mm时,加权磁通φ i j a ( i = 1 , 2 ; j = 1 , 4 ) φ i j ( i = 1 , 2 ; j = 1 , 4 ) x =2~2.5 mm时,气隙中的磁通变化剧烈,此时加权漏磁磁通与加权励磁磁通均与由单平面测量方法求得的磁通有较大差异,且均小于由单平面测量方法求得的磁通。
图7
图7
偏置磁路和励磁磁路中的磁通
Fig.7
Magnetic flux in bias magnetic circuit and excitation magnetic circuit
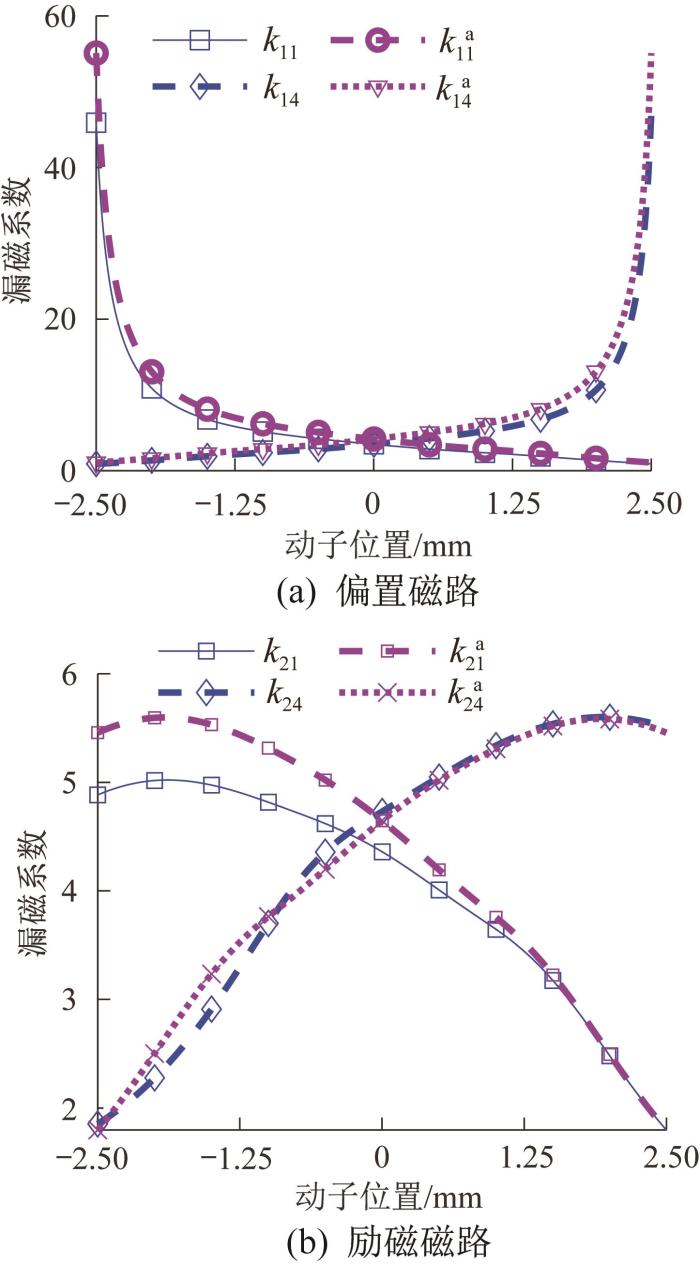
联立式(6)和式(13),计算得到偏置磁路和励磁磁路中的加权漏磁系数k i j a ( i = 1 , 2 ; j = 1 , 4 ) 图8 所示。由图8 (a)可知,由于偏置磁路中仅有永磁体作为磁力源,磁路对称,当动子由x =-2.5 mm运动至x =2.5 mm时,气隙g1 中磁通的变化情况与反向运动时气隙g4 中磁通的变化情况保持一致。因此,加权漏磁系数k 11 a k 14 a 图8 (b)可知,在该磁阻驱动器的整个行程内,由加权计算方法得到的磁通均大于由单平面测量方法求得的磁通。
图8
图8
偏置磁路和励磁磁路中的漏磁系数
Fig.8
Magnetic flux leakage coefficient in bias magnetic circuit and excitation magnetic circuit
综上所述,考虑加权漏磁系数的大行程麦克斯韦磁阻驱动器的推力解析模型为:
F = S μ 0 B r L p m k 11 a ( k 11 a ) 2 ( S L p m + x 0 - x ) + 2 N I μ 0 ( x 0 + x ) + k 21 a k 24 a ( x 0 - x ) 2 - 2 N I μ 0 k 24 a k 21 a ( x 0 + x ) + ( x 0 - x ) + B r L p m k 14 a ( k 14 a ) 2 ( S L p m + x 0 + x ) 2 (14)
3 大行程麦克斯韦磁阻驱动器推力解析模型仿真与实验验证
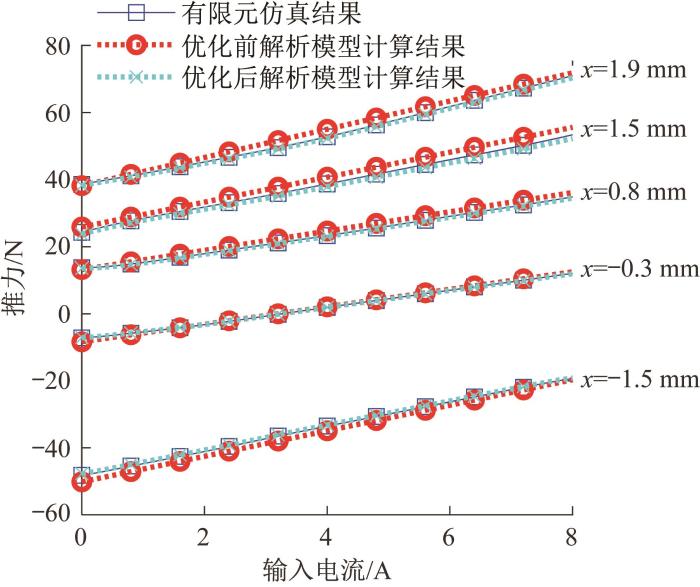
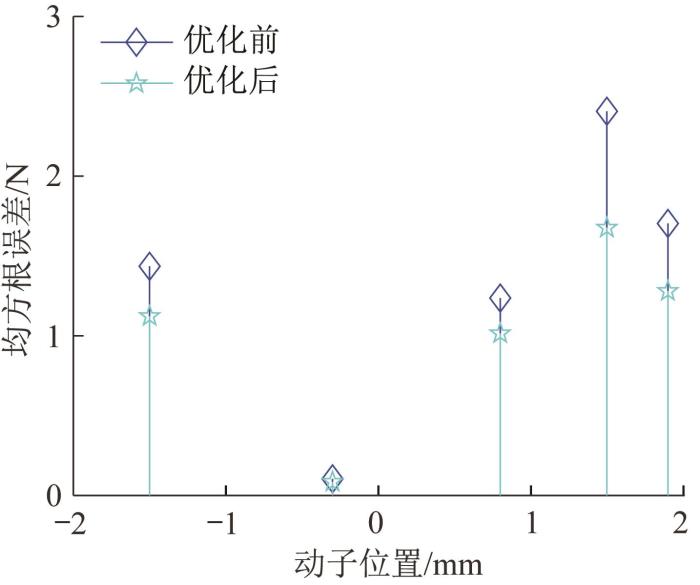
为验证所构建的考虑加权漏磁系数的大行程麦克斯韦磁阻驱动器推力解析模型的准确性,利用有限元仿真软件ANSYS中的Maxwell 3D模块开展仿真分析并进行对比。在有限元仿真软件中,基于大行程麦克斯韦磁阻驱动器三维模型,按照表2 进行仿真参数设置,求解当动子位置x =-1.5,-0.3,0.8,1.5,1.9 mm时,输入电流I 在2 s内从0 A上升至2 A所产生的推力F fea ,解析模型计算结果与有限元仿真结果的对比以及两者的均方根误差如图9 及图10 所示。
图9
图9
优化前后解析模型计算推力与仿真推力的对比
Fig.9
Comparison between calculated thrust of analytical model before and after optimization and simulated thrust
图10
图10
优化前后解析模型计算推力与仿真推力的均方根误差
Fig.10
Root mean square error between calculated thrust of analytical model before and after optimization and simulated thrust
由图9 和图10 可知,大行程麦克斯韦磁阻驱动器推力的解析计算结果与仿真结果基本一致,且推力与输入电流保持较好的线性关系;优化后解析模型的计算结果与仿真结果的均方根误差小于2.5 N,仅为最大推力的3.5%,且随着动子与中心位置之间距离的增大,解析计算结果与仿真结果之间的误差逐渐增大。即:当动子距离初始位置较远时,该磁阻驱动器气隙中的漏磁现象对推力的影响更为明显。由图9 和图10 还可以看出,优化后解析模型计算推力小于优化前的,且与仿真结果的均方根误差更小,可以更好地描述该磁阻驱动器动子处于不同位置时推力与输入电流的关系。
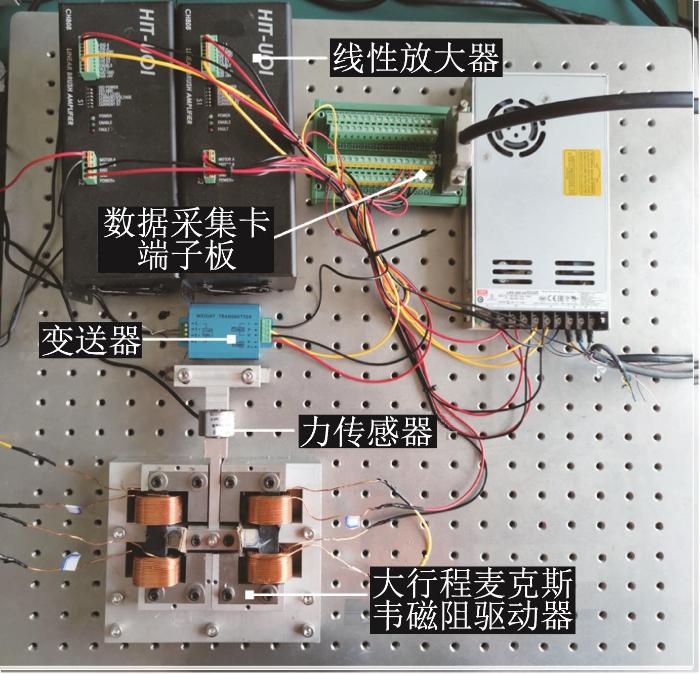
为了测量大行程麦克斯韦磁阻驱动器的实际推力和进一步验证解析模型的准确性,搭建了基于LabVIEW的推力测试系统,如图11 所示。其中CH808线性放大器将PCI-6221数据采集卡的输出电压(-10~10 V)线性转换为磁阻驱动器的输入电流(-8~8 A);推力由MZLG力传感器(量程为±50 kg)测量,并通过变送器实现-10~10 V的模拟量输出,并由数据采集卡进行实时采集。
图11
图11
大行程麦克斯韦磁阻驱动器推力测试系统
Fig.11
Thrust test system of large stroke Maxwell reluctance actuator
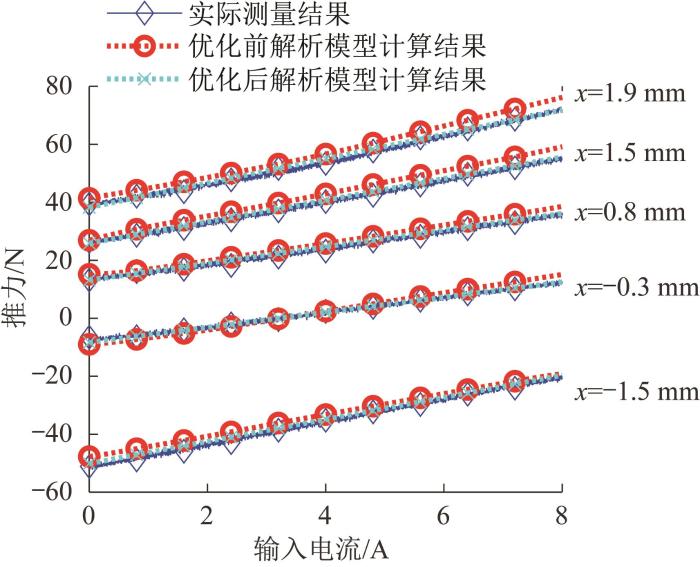
在推力测试实验中,输入电流I 、动子位置x 均与仿真时设定一致,并利用力传感器对动子位置x =-1.5,-0.3,0.8,1.5,1.9 mm时大行程麦克斯韦磁阻驱动器的推力进行测量,优化前后解析模型计算推力与实测推力的对比如图12 所示。
图12
图12
优化前后解析模型计算推力与实测推力的对比
Fig.12
Comparison between calculated thrust of analytical model before and after optimization and measured thrust
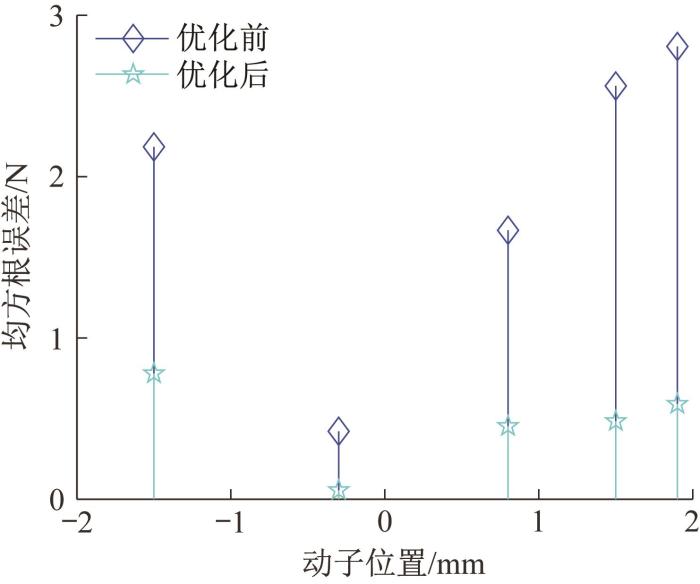
为了验证优化前后解析模型的精度,基于优化前后解析模型计算推力和实测推力计算均方根误差,结果如图13 所示。由图13 可知,对于大行程麦克斯韦磁阻驱动器,优化前解析模型计算推力与实测推力的均方根误差在大部分情况下均大于1.7 N,优化后解析模型计算推力与实测推力的均方根误差明显下降,均小于0.6 N。由此可见,加权漏磁系数的使用,有效地提高了推力解析模型的精度。
图13
图13
优化前后解析模型计算推力与实测推力的均方根误差
Fig.13
Root mean square error between calculated thrust of analytical model before and after optimization and measured thrust
4 结 论
本文利用考虑综合高斯函数的加权漏磁系数的磁路建模方法,改进了大行程麦克斯韦磁阻驱动器漏磁系数的计算方式,得到了可准确描述其推力与输入电流函数关系的解析模型。首先,对大行程麦克斯韦磁阻驱动器的理想磁路进行了分析并与考虑漏磁的磁路进行对比,探究了漏磁现象对推力的影响,验证了建模时考虑漏磁的必要性。然后,通过对大行程麦克斯韦磁阻驱动器三维磁场的仿真,得到了其偏置磁场和励磁磁场单独作用时的磁场分布以及漏磁情况,并通过计算得到了基于高斯曲线的加权漏磁系数。最后,搭建了大行程麦克斯韦磁阻驱动器的推力测试系统,并将仿真推力和实测推力与优化前后解析模型计算推力进行了对比。结果表明,优化后解析模型计算推力与实测推力之间的均方根误差仅为优化前解析模型的11.1%,且与实测推力的均方根误差小于0.6 N,有效提升了解析模型的精度。
参考文献
View Option
[1]
LEE C LEE J W RYU S G et al Optimum design of a large area, flexure based XYθ mask alignment stage for a 12-inch wafer using grey relation analysis
[J]. Robotics and Computer-Integrated Manufacturing , 2019 , 58 : 109 -119 . doi:10.1016/j.rcim.2019.02.005
[本文引用: 1]
[2]
TIAN Yan-ling CAI Kun-hai ZHANG Da-wei et al Development of a XYZ scanner for home-made atomic force microscope based on FPAA control
[J]. Mechanical Systems and Signal Processing , 2019 , 131 : 222 -242 . doi:10.1016/j.ymssp.2019.05.057
[本文引用: 1]
[3]
[本文引用: 1]
WANG Nian-feng ZHANG Zhi-yuan ZHANG Xian-min et al Performance comparison and analysis of three 2-DOF compliant precision positioning stages
[J]. Journal of Mechanical Engineering , 2018 , 54 (13 ): 102 -109 .
DOI:10.3901/jme.2018.13.102
[本文引用: 1]
[5]
KATALENIC A BOEIJ J D BUTLER H et al Linearization of a current-driven reluctance actuator with hysteresis compensation
[J]. Mechatronics , 2013 , 23 (2 ): 163 -171 .
[本文引用: 1]
[6]
LU X D TRUMPER D L Ultrafast tool servos for diamond turning
[J]. CIRP Annals-Manufacturing Technology , 2005 , 54 (1 ): 383 -388 .
[本文引用: 1]
[7]
HIEMSTRA D B PARMAR G AWTAR S Performance tradeoffs posed by moving magnet actuators in flexure-based nanopositioning
[J]. IEEE/ASME Transactions on Mechatronics , 2014 , 19 (1 ): 201 -212 .
[本文引用: 1]
[8]
ITO S TROPPMAIR S LINDNER B et al Long-range fast nanopositioner using nonlinearities of hybrid reluctance actuator for energy efficiency
[J]. IEEE Transactions on Industrial Electronics , 2019 , 66 (4 ): 3051 -3059 .
[本文引用: 1]
[9]
ZHU Zhi-wei CHEN Li Suet TO A novel direct drive electromagnetic XY nanopositioning stage
[J]. CIRP Annals , 2021 , 70 (1 ): 415 -418 .
[本文引用: 1]
[10]
谢晓丹 ,王博超 ,吴丹 电磁驱动快速刀具伺服机构的电磁场和驱动力
[J].清华大学学报(自然科学版) ,2008 ,48 (8 ):72 -75 .
[本文引用: 1]
XIE Xiao-dan WANG Bo-chao WU Dan Magneticfield and driving force characteristics for a fast electromagnetic tool servo
[J]. Journal of Tsinghua University (Science and Technology) , 2008 , 48 (8 ): 72 -75 .
[本文引用: 1]
[11]
CHEN Li NIU Yu-han YANG Xu et al A novel compliant nanopositioning stage driven by a normal-stressed electromagnetic actuator
[J]. IEEE Transactions on Automation Science and Engineering , 2022 , 19 (4 ): 3039 -3048 . doi:10.1109/TASE.2021.3105683
[12]
GUTIERREZ H M RO P I Magnetic servo levitation by sliding-mode control of nonaffine systems with algebraic input invertibility
[J]. IEEE Transactions on Industrial Electronics , 2005 , 52 (5 ): 1449 -1455 .
[13]
邹亮 ,李庆民 ,许家响 ,等 考虑漏磁效应的永磁饱和型故障限流器磁路建模与实验研究
[J].中国电机工程学报 ,2012 ,32 (21 ):137 -145 .
[本文引用: 1]
ZOU Liang LI Qing-min XU Jia-xiang et al Magnetic topology modeling and experimental study of permanent-magnet-biased saturation based fault current limiter with leakage flux effect
[J]. Proceedings of the CSEE , 2012 , 32 (21 ): 137 -145 .
[本文引用: 1]
[15]
CSENCSICS E SCHLARP J SCHITTER G Bandwidth extension of hybrid-reluctance-force-based tip/tilt system by reduction of eddy currents
[C]//2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM) , Munich, Jul . 3 -7 , 2017 .
[16]
ZHU Zi-hui CHEN Li NIU Yu-han et al Triaxial fast tool servo using hybrid electromagnetic-piezoelectric actuation
[J]. IEEE Transactions on Industrial Electronics , 2022 , 69 (2 ): 1728 -1738 .
[本文引用: 1]
[17]
ITO S TROPPMAIR S CIGARINI F et al High-speed scanner with nanometer resolution using a hybrid reluctance force actuator
[J]. IEEE Journal of Industry Applications , 2019 , 8 (2 ): 170 -176 .
[本文引用: 1]
[18]
ITO S CIGARINI F SCHITTER G Flux-controlled hybrid reluctance actuator for high-precision scanning motion
[J]. IEEE Transactions on Industrial Electronics , 2020 , 67 (11 ): 9593 -9600 .
[19]
[本文引用: 1]
LI Heng ZHU Yu JIA Song-tao et al Research and development of ultra-precision magnetic stage
[J]. Modern Machinery , 2007 (2 ): 1 -3 .
DOI:10.3969/j.issn.1002-6886.2007.02.001
[本文引用: 1]
Optimum design of a large area, flexure based XYθ mask alignment stage for a 12-inch wafer using grey relation analysis
1
2019
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
Development of a XYZ scanner for home-made atomic force microscope based on FPAA control
1
2019
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
三种两自由度柔顺精密定位平台的性能对比与分析
1
2018
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
三种两自由度柔顺精密定位平台的性能对比与分析
1
2018
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
基于二级杠杆机构的二自由度微定位平台设计与分析
1
2020
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
基于二级杠杆机构的二自由度微定位平台设计与分析
1
2020
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
Linearization of a current-driven reluctance actuator with hysteresis compensation
1
2013
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
Ultrafast tool servos for diamond turning
1
2005
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
Performance tradeoffs posed by moving magnet actuators in flexure-based nanopositioning
1
2014
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
Long-range fast nanopositioner using nonlinearities of hybrid reluctance actuator for energy efficiency
1
2019
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
A novel direct drive electromagnetic XY nanopositioning stage
1
2021
... 大行程超精密纳米定位是指能够在毫米级(≥1 mm)行程范围内实现纳米级(0.1~100 nm)分辨率或定位精度的一种技术[1 -2 ] .目前广泛使用的压电驱动器具有纳米级精度,但其行程一般只有几十微米至几百微米[3 ] .另一种常见的驱动器——音圈电机也存在推力密度低的缺点,难以实现高频响快速跟踪任务[4 ] .近年来,荷兰埃因霍芬理工大学的Katalenic等和美国麻省理工学院的Lu等[5 -6 ] 先后研制了多种基于麦克斯韦力驱动的磁阻驱动器.区别于音圈电机的洛伦兹力驱动原理,麦克斯韦磁阻驱动器依靠磁阻最小原理产生变磁阻正应力,其大小与气隙处磁感应强度的平方成正比,且其励磁线圈集中绕制在定子上,故该类驱动器具有力密度大、惯量低、响应速度快、结构简单以及热负荷能力强等优点[7 ] .基于此,国内外学者如奥地利维也纳技术大学的Ito等和南京理工大学的Zhu等[8 -9 ] 设计了多种基于麦克斯韦磁阻驱动器的纳米定位平台. ...
电磁驱动快速刀具伺服机构的电磁场和驱动力
1
2008
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...
电磁驱动快速刀具伺服机构的电磁场和驱动力
1
2008
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...
A novel compliant nanopositioning stage driven by a normal-stressed electromagnetic actuator
0
2022
Magnetic servo levitation by sliding-mode control of nonaffine systems with algebraic input invertibility
0
2005
考虑漏磁效应的永磁饱和型故障限流器磁路建模与实验研究
1
2012
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...
考虑漏磁效应的永磁饱和型故障限流器磁路建模与实验研究
1
2012
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...
基于三维磁场分析建立电磁铁等效磁路的研究
1
2003
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...
基于三维磁场分析建立电磁铁等效磁路的研究
1
2003
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...
Bandwidth extension of hybrid-reluctance-force-based tip/tilt system by reduction of eddy currents
0
2017
Triaxial fast tool servo using hybrid electromagnetic-piezoelectric actuation
1
2022
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...
High-speed scanner with nanometer resolution using a hybrid reluctance force actuator
1
2019
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...
Flux-controlled hybrid reluctance actuator for high-precision scanning motion
0
2020
电磁式超精密微动工作台研究现状与方向
1
2007
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...
电磁式超精密微动工作台研究现状与方向
1
2007
... 为了对磁阻微定位平台进行精确的结构设计和控制,需要对超精密磁阻驱动器的磁场和推力进行准确建模和分析[10 -13 ] .目前,采用磁路建模方法构建磁阻驱动器的等效磁路模型,并将其磁轭及气隙中的磁通量消耗等效为磁阻,同时考虑漏磁对其性能的影响,即能有效建立描述磁阻驱动器推力的解析模型[14 -16 ] .但将传统磁路建模方法应用于毫米级大行程麦克斯韦磁阻驱动器时,由于涡流损耗和漏磁大幅增加、气隙区磁场分布不均匀且非线性强烈,使得利用单平面磁通测量结果计算得到的漏磁系数无法准确地描述该磁阻驱动器的漏磁特性,从而导致难以准确地建立推力解析模型[17 -19 ] . ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}