牵引式下肢康复机器人机构参数优化及轨迹规划
Mechanism parameter optimization and trajectory planning of traction lower limb rehabilitation robot
牵引式下肢康复机器人机构参数优化及轨迹规划 |
| 张鹏程,牛建业,刘承磊,宋井科,王立鹏,张建军 |
|
Mechanism parameter optimization and trajectory planning of traction lower limb rehabilitation robot |
| Peng-cheng ZHANG,Jian-ye NIU,Cheng-lei LIU,Jing-ke SONG,Li-peng WANG,Jian-jun ZHANG |
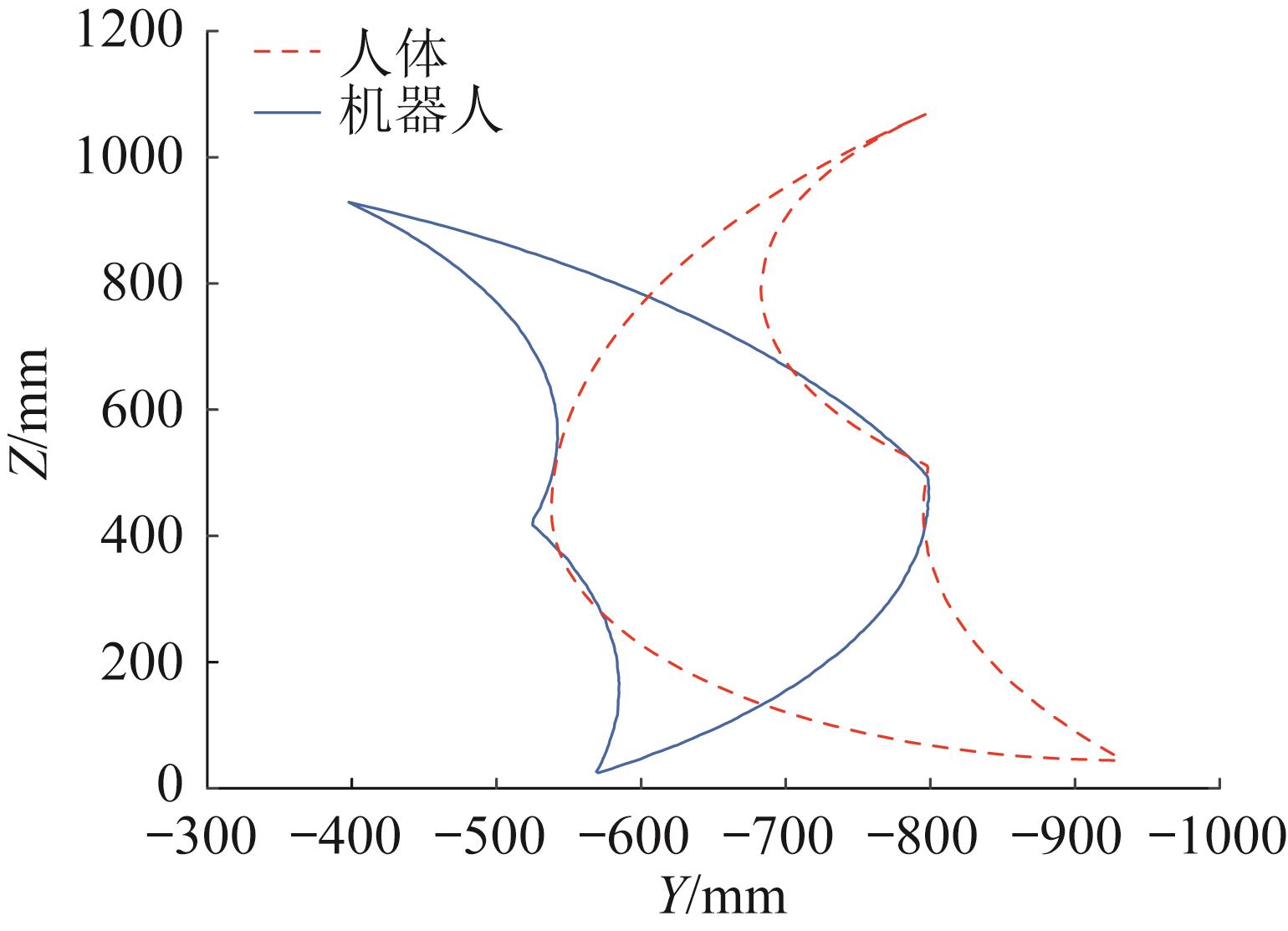
| 图6 人机系统矢状面工作空间区域 |
| Fig.6 Sagittal workspace area of human-machine system |
|
|