空间站舱体水平旋转装备六点调平算法及同步控制方法
Six-point leveling algorithm and synchronous control method for horizontal rotating equipment of space station cabin
空间站舱体水平旋转装备六点调平算法及同步控制方法 |
| 任明妍,谭旭,曾婷,王荣,李海月 |
|
Six-point leveling algorithm and synchronous control method for horizontal rotating equipment of space station cabin |
| Ming-yan REN,Xu TAN,Ting ZENG,Rong WANG,Hai-yue LI |
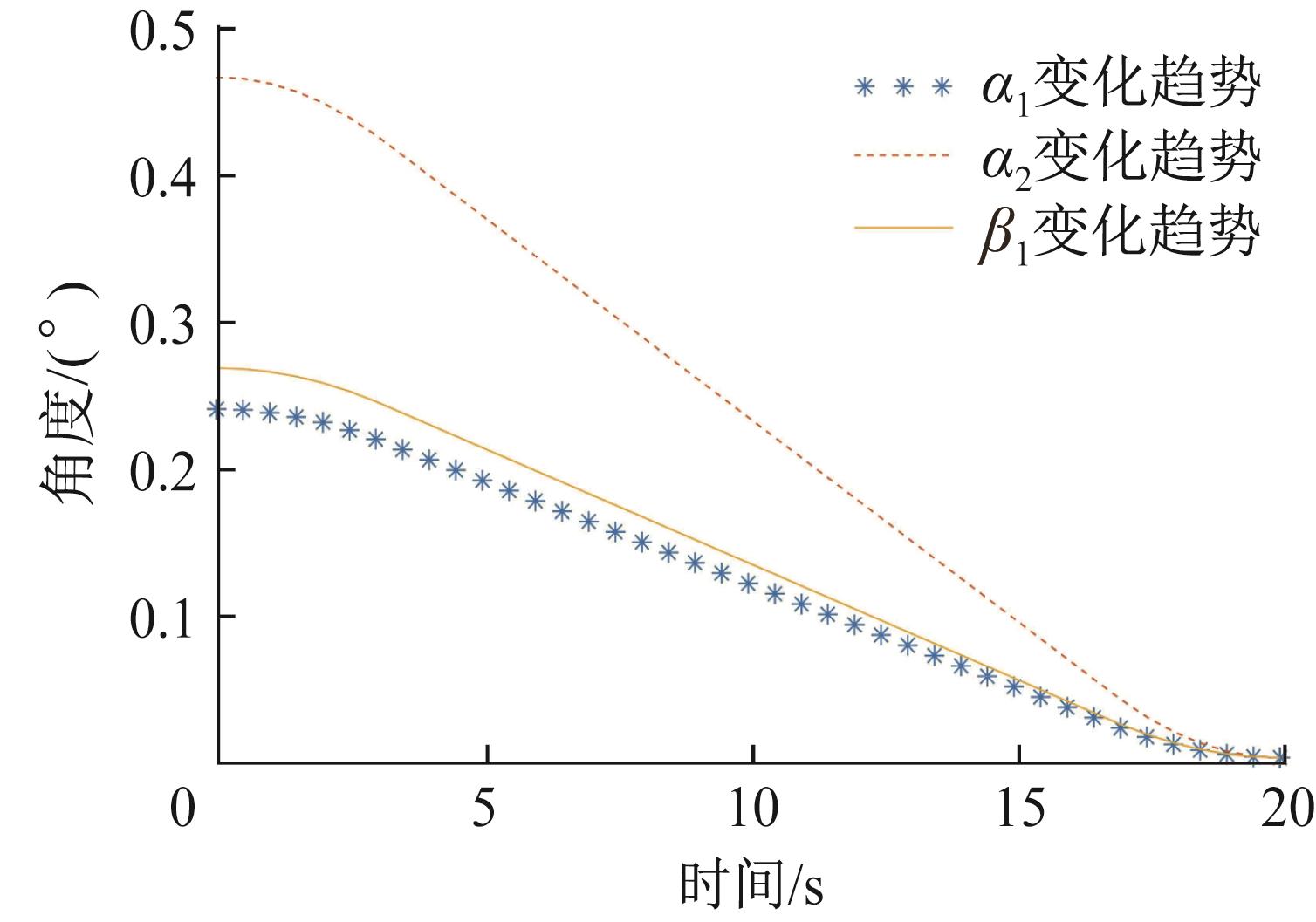
| 图4 第1类姿态下(支腿5最高)开始调平后 α1、 α2、 β1的变化趋势 |
| Fig.4 Changing trend of α1, α2, β1 after leveling under the first type of attitude (with the highest outrigger 5) |
|
|